КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Кинематика точки
|
|
|
|
Чтобы описывать движение точки, нужно уметь задавать ее положение в пространстве. Положение интересующей нас точки A задают радиус-вектором  , проведенным из некоторой неподвижной точки O выбранной системы отсчета (начало отсчета) в точку A. При движении точки A ее радиус-вектор меняется в общем Рис.1.1.1.
, проведенным из некоторой неподвижной точки O выбранной системы отсчета (начало отсчета) в точку A. При движении точки A ее радиус-вектор меняется в общем Рис.1.1.1.
случае, как по модулю, так и по направлению, т. е.
радиус- вектор зависит от времени t. Геометрическое место концов радиус-вектора в данной системе отсчета называют траекторией точки A.
Введем понятие скорости точки. Пусть за промежуток времени Δt точка A переместилась из точки 1 в точку 2 (рис.1.1.1). Из рисунка видно, что вектор перемещения  точки A представляет собой приращение радиус-вектора за
точки A представляет собой приращение радиус-вектора за
время Δ t:  . Отношение Δ/Δt называют средним вектором скорости
. Отношение Δ/Δt называют средним вектором скорости  за время Δ t. Вектор совпадает по направлению с Δ.
за время Δ t. Вектор совпадает по направлению с Δ.
Определим вектор скорости  точки в данный момент
точки в данный момент
времени как предел отношения Δ/Δ t при Δ t → 0, т. е.
 ( 1.1.1 )
( 1.1.1 )
Это значит, что вектор скорости точки в данный момент времени равен производной от радиус-вектора по времени и направлен по касательной к траектории в данной точке в сторону движения точки A (как и вектор d). Модуль вектора равен
Движение точки характеризуется также ускорением. Вектор ускорения  определяет скорость изменения вектора скорости точки со временем:
определяет скорость изменения вектора скорости точки со временем:
 ( 1.1.2 )
( 1.1.2 )
т. е. равен производной от вектора скорости по времени. Направление вектора совпадает с направлением вектора d— приращением вектора за время dt. Модуль вектора определяется аналогично модулю вектора .
Таким образом, зная зависимость r (t), можно найти скорость и ускорение точки в каждый момент времени.
Возникает и обратная задача: можно ли найти (t) и (t), зная зависимость от времени ускорения (t)?
Оказывается, для получения однозначного решения этой задачи одной зависимости (t) недостаточно, необходимо еще знать начальные условия, а именно скорость 0 и радиус-вектор 0 точки в некоторый начальный момент t = 0. Чтобы в этом убедиться, рассмотрим простейший случай, когда в процессе движения ускорение точки = const. Такое движение называется равноускоренным.
Сначала определим скорость точки. Согласно (1.1.2), за промежуток времени dt элементарное приращение скорости d= d t. Проинтегрировав это выражение по времени от t = 0 до t, найдем приращение вектора скорости за это время:
Но величина Δ— это еще не искомая скорость. Чтобы найти , необходимо знать скорость 0 в начальный момент времени. Тогда = 0 + Δ, или
= 0 + t. (1.1.3)
Аналогично решается вопрос и о радиус-векторе точки. Согласно (1.1.1), за промежуток времени dt элементарное приращение радиус-вектора d= dt. Интегрируя это выражение с учетом найденной зависимости (t), определим приращение радиус-вектора за время от t = 0 до t:
Для нахождения самого радиус-вектора (t) необходимо знать еще положение точки 0 в начальный момент времени. Тогда = 0 + Δ, или
 (1.1.4)
(1.1.4)
Рассмотрим, например, движение камня, брошенного под некоторым углом к горизонту с начальной скоростью 0. Если считать, что камень движется с постоянным ускорением =  , то его положение относительно точки бросания (0 = 0) определяется радиус-вектором
, то его положение относительно точки бросания (0 = 0) определяется радиус-вектором
т. е. в данном случае представляет собой сумму двух векторов, что показано на рис.1.1.2.
Итак, для полного решения задачи о движении точки – оп ределения ее скорости и положения в зависимости от времени — недостаточно знать зависимость (t), но еще необходимо знать и начальные условия, т. е. скорость 0 и положение 0 точки в начальный момент времени.
В заключение напомним, что в СИ единицами длины, скорости и ускорения являются соответственно метр (м), метр на секунду (м/с) и метр на секунду в квадрате (м/с2).
Можно с выбранным телом отсчета жестко связать определенную систему координат (декартову, косоугольную или криволинейную). Выбор той или иной системы координат определяется рядом соображений: характером или симметрией задачи, постановкой вопроса, а также стремлением упростить само решение. Ограничимся здесь декартовой системой координат x, y, z.Запишем проекции на оси x,y,z радиус-вектора (t), характеризующего положение интересующей нас точки относительно начала координат O в момент t: x=x(t); y=y(t); z=z(t).
Зная зависимость этих координат от времени — закон движения точки, можно найти положение точки в каждый момент времени, ее скорость и ускорение. Действительно, спроецировав (1.1.1) и (1.1.2), например, на ось x, получим формулы, определяющие проекции векторов скорости и ускорения на эту ось:
 (1.1.5)
(1.1.5)
где dx — проекция вектора перемещения dна ось x;
 (1.1.6)
(1.1.6)
где dυx — проекция вектора приращения скорости dна ось x. Аналогичные соотношения получаются для y- и z-проекций соответствующих векторов. Из этих формул видно, что проекции векторов скорости и ускорения равны соответственно первой и второй производным координат по времени.
Таким образом, зависимости x(t), y(t), z(t), по существу, полностью определяют движение точки. Зная их, можно найти не только положение точки, но и проекции ее скорости и ускорения, а, следовательно, модуль и направление векторов и в любой момент времени. Например, модуль вектора скорости
 (1.1.7)
(1.1.7)
направление же вектора задается направляющими косинусами по формулам



где α, β, γ — углы меду вектором и осями x, y, z соответственно. Аналогичными формулами определяются модуль и направление вектора ускорения.
Кроме того, можно решить и ряд других вопросов: найти траекторию точки, зависимость пройденного ею пути от времени, зависимость скорости от положения точки и пр.
Решение обратной задачи — нахождение скорости и закона движения точки по заданному ускорению — проводится, как и в векторном способе, путем интегрирования (в данном случае проекций ускорения по времени), причем задача и здесь имеет однозначное решение, если кроме ускорения заданы еще и начальные условия: проекции скорости и координаты точки в начальный момент.
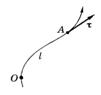 Когда траектория точки известна, ее положение можно задать дуговой координатой l - расстоянием вдоль траектории от выбранного начала отсчета О (рис.1.1.3). При этом произвольно устанавливают положительное направление отсчета координаты l (например, так, как показано стрелкой на рисунке).
Когда траектория точки известна, ее положение можно задать дуговой координатой l - расстоянием вдоль траектории от выбранного начала отсчета О (рис.1.1.3). При этом произвольно устанавливают положительное направление отсчета координаты l (например, так, как показано стрелкой на рисунке).
Движение точки определено, если известны ее траектория, начало отсчета O, положительное направление Рис.1.1.3.
отсчета дуговой координаты l и закон движения точки,
т. е. зависимость l(t).
Введем единичный вектор  , связанный с движущейся точкой A и направленный по касательной к траектории в сторону возрастания дуговой координаты l (рис.1.1.4).Очевидно, что — переменный по направлению вектор: он зависит от l. Вектор скорости точки A направлен по касательной к траектории, поэтому его можно представить так:
, связанный с движущейся точкой A и направленный по касательной к траектории в сторону возрастания дуговой координаты l (рис.1.1.4).Очевидно, что — переменный по направлению вектор: он зависит от l. Вектор скорости точки A направлен по касательной к траектории, поэтому его можно представить так:
= υτ, (1.1.8)
где υτ = dl/dt — проекция вектора на направление вектора , причем υτ — величина алгебраическая. Кроме того, | υτ | = || = υ.
Продифференцируем (1.1.8) по времени:
 (1.1.9 )
(1.1.9 )
Затем преобразуем второе слагаемое этого выражения:
 (1.1.10 )
(1.1.10 )
Определим приращение вектора на участке dl (рис.1.1.4). Можно строго показать, что при стремлении точки 2 к точке 1 отрезок траектории между ними стремится к дуге окружности с центром в некоторой точке O. Эту точку называют центром кривизны траектории в данной точке, а радиус ρ соответствующей окружности — радиусом кривизны траектории в той же точке.
 Как видно из рисунка, угол
Как видно из рисунка, угол  , откуда Рис.1.1.4.
, откуда Рис.1.1.4.
 причем, если dl → 0, то d^. Введя единичный вектор
причем, если dl → 0, то d^. Введя единичный вектор  нормали к траектории в точке 1, направленный к центру кривизны, запишем последнее равенство в векторном виде:
нормали к траектории в точке 1, направленный к центру кривизны, запишем последнее равенство в векторном виде:
d/dl = /ρ. (1.1.11)
Подставим (1.1.11) в (1.1.10) и полученное выражение в (1.1.9). В результате найдем
 (1.1.12)
(1.1.12)
Здесь первое слагаемое называют тангенциальным ускорением, второе — нормальным ускорением. Таким образом, полное ускорение точки может быть представлено как векторная сумма тангенциального и нормального ускорений.
Проекции вектора на орты и , как видно из (1.1.12), равны

 (1.1.13)
(1.1.13)
Модуль полного ускорения точки
|
|
|
|
|
Дата добавления: 2014-01-06; Просмотров: 468; Нарушение авторских прав?; Мы поможем в написании вашей работы!