КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Силы и моменты, обеспечивающие поворот
|
|
|
|
Значение и особенности криволинейного движения
ДИНАМИКА КРИВОЛИНЕЙНОГО ДВИЖЕНИЯ
Способы повышения плавности хода автомобиля
Шины влияют на высокочастотные колебания автомобиля. Для улучшения плавности хода автомобиля целесообразно иметь шины возможно меньшей жесткости. В связи с этим стремятся уменьшить их жесткость путем снижения давления воздуха в них и увеличения ширины профиля.
Применение независимой подвески передних колес позволяет получить отношение статических прогибов передней и задней подвесок, близкое к единице. В результате при наезде автомобиля на препятствие галопирования практически не происходит, так как кузов перемещается параллельно самому себе.
При применении независимой подвески для задних ведущих колес значительно усложняется конструкция привода колес. Поэтому, как правило, независимую подвеску применяют только для передних колес.
В качестве упругого элемента независимой подвески используют пружины, а в последнее время — пневматические упругие элементы, реже — торсионы. Пружины и торсионы по сравнению с листовыми рессорами имеют меньшие массы, большую долговечность, практически не имеют внутреннего трения, просты в изготовлении и не нуждаются в уходе.
Пневматическая подвеска обеспечивает высокую плавность хода благодаря небольшой жесткости и благоприятному характеру изменения упругой характеристики, а также возможность регулирования в широких пределах жесткости подвески и высоты кузова.
В условиях эксплуатации автотранспортные средства большую часть времени движутся по криволинейным траекториям. Однако если радиус кривой превышает 500 - 700 м, то движение по ней практически ничем не отличается от прямолинейного движения. Поэтому к криволинейному относят условно только такое движение, когда радиус кривой меньше указанного значения.
В отличие от прямолинейного, криволинейное движение имеет свои особенности, которые связаны с действием поперечных сил инерции и приложением к колесам боковых реакций.
Условием перехода автомобиля в криволинейное движение является приложение к нему центростремительных сил, т.е. таких сил, которые направлены поперек продольной оси и создают поворачивающий момент. Образование таких сил обеспечивают передние управляемые колеса, которые при повороте в ту или иную сторону образуют с продольной осью автомобиля некоторый угол q.
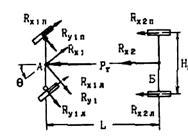
Как известно, управляемые колеса автомобиля могут быть ведомыми и ведущими. Вначале рассмотрим механизм образования центростремительных сил при повороте ведомых колес (рис. 54).
|
Рис. 54. Схема сил при повороте заднеприводного автомобиля
При повороте ведомых управляемых колес на угол q к ним прикладываются поперечные реакции (Rу1л и Rу1п), результирующий вектор которых (Rу1 = Rу1л + Rу1п) можно приложить к середине передней оси в точке А. В этой же точке можно приложить и результирующий вектор продольных реакций (Rх1 = Rх1л + Rх1п). Проекции указанных сил на продольную ось образуют продольное сопротивление, которое при равномерном движении автомобиля уравновешивается толкающим усилием (Рт), создаваемым задними ведущими колесами:
Rу1sinq.+ Rх1cosq = Рт. (209)
Величина толкающего усилия численно равна сумме продольных реакций на колесах:
Рт = Rx2 = Rx2л + Rх2п. (210)
Проекция суммарной боковой реакции (Rу1) на поперечную ось, действующая в сторону поворота колес на плече L относительно точки Б, создает поворачивающий момент:
Mпов = Rу1cosq L,(10.2). (211)
Проекция суммарной продольной силы (Rх1), напрaвленная в противоположную сторону создает момент сопротивления повороту:
Mсоп1 = Rх1sinq L. (212)
Если имеется разница в продольных реакциях на задних колесах, то к моменту Mсоп1 добавляется создаваемый ими момент сопротивления:
Mсоп2 = (Rх2л - Rх2п) Hк/2, (213)
где Нк - колея автомобиля.
Момент сопротивления повороту, создаваемый колесами заднего ведущего моста, может быть обусловлен работой межколесного дифференциала или разным сопротивлением качению правого и левого колеса (из-за различий опорной поверхности, разницы в загрузке, а также действия других факторов).
Для того, чтобы переход автомобиля в криволинейное движение стал возможен, необходимо, чтобы поворачивающий момент был больше суммарного момента сопротивления повороту:
Mпов > Mсоп1 + Mсоп2. (214)
Из (214) следует, что необходимым условиям перехода автомобиля в криволинейное движение является такое значение боковых реакций на управляемых колесах, при которых соблюдается следующее неравенство:
Rу1 > Rх1tgq + (Rх2л - Rх2п) . (215)
. (215)
Минимальный коэффициент сцепления, при котором обеспечивается поворот автомобиля, можно найти, принимая Rу12+ Rх12 = (Ga1j)2 и Rх1 = Ga1j и решая неравенство (215) относительно j:
j > jmin . (216)
. (216)
Как следует из полученной формулы, требования к коэффициенту сцепления тем выше, чем больше угол поворота управляемых колес, выше сопротивление опорной поверхности, а также больше момент сопротивления повороту задних колес и меньше масса, приходящаяся на управляемые колеса.
При отсутствии момента Mсоп2 (Rх2л = Rх2п) переход в криволинейное движение значительно облегчается, т.к.
jmin =  . (217)
. (217)
В отличие от автомобиля с ведомыми управляемыми колесами, поворот автомобиля, управляемые колеса которого являются ведущими и повернуты на угол q к продольной оси (рис. 55), обеспечивают не только боковые (Rу1), но и направленные по ходу движения продольные реакции (Rу1):
Mпов = Rу1cosqL + Rх1sinqL. (218)
Заметим, что для поворота такого автомобиля, как правило, вполне достаточно только продольных реакций. Это свидетельствует о том, что перевод в криволинейное движение автомобиля, передние управляемые колеса которого являются ведущими, осуществляется гораздо легче, чем автомобиля с ведомыми. Указанное преимущество особенно велико у переднеприводных автомобилей, задние колеса которых являются ведомыми и не создают значительного сопротивления повороту, т.к. разница продольных реакций на них (Rх2л - Rх2п), как правило, невелика из-за малых абсолютных значений коэффициентов сопротивления качению (Df2 » 0):
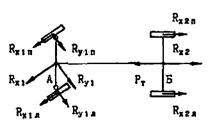
Рис. 55. Схема сил при повороте переднеприводного автомобиля
Mсоп2 = (Rх2л - Rх2п)Нк/2 = Gа2Df2Нк/4. (219)
Таким образом, с точки зрения динамики поворота переднеприводные автомобили имеют значительные преимущества перед заднеприводными.
|
|
|
|
Дата добавления: 2014-01-06; Просмотров: 968; Нарушение авторских прав?; Мы поможем в написании вашей работы!