КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Критическая скорость по условиям управляемости
|
|
|
|
Автомобили с излишней поворачиваемостью при больших скоростях движения теряют управляемость. Потеря управляемости возникает при достижении некоторой скорости движения – критической. Определим значение критической скорости (Vкр).
Предположим, что водитель, управляя автомобилем, повернул рулевое колесо на угол q и перевел автомобиль на некоторое время в криволинейное движение. Как следует из формул (243) и (244), углы увода передних и задних колес из-за относительно небольшого значения квадрата скорости будут очень малы (d2» d1» 0). При малых углах увода возврат колес в нейтральное положение (q ® 0) приводит к выпрямлению траектории движения автомобиля:
R = 
 . (252)
. (252)
Увеличение скорости движения автомобиля приводит к возрастанию углов увода, причем при избыточной поворачиваемости d2 возрастает быстрее, чем d1. В результате при некоторой скорости движения разница углов увода может достичь L/R, т.е.:
d2 - d1 =  (253)
(253)
При такой скорости возврат колес в нейтральное положение уже не приводит к прямолинейному движению, т.е. радиус поворота не устремляется к бесконечности. Действительно:
R =  . (254)
. (254)
Таким образом, при некоторой скорости автомобиль становится неуправляемым, т.к. за счет возврата управляемых колес в исходное положение (q = 0) его невозможно вывести из криволинейного движения. Скорость, при которой автомобиль оказывается в таком положении, называется критической скоростью движения по управляемости:
Vкр =  . (255)
. (255)
Из формулы (255) следует, что критическая скорость имеет место только для автомобилей с избыточной поворачиваемостью (Кп > 0). Автомобили с нейтральной и недостаточной поворачиваемостью критической скорости не имеют.
11.3. Колебания управляемых колес вследствие их дисбаланса
Если колесо полностью сбалансировано, то центробежные силы, действующие в каждой точке колеса, а также моменты этих сил относительно центра тяжести взаимно уравновешиваются, т.е. векторные суммы указанных сил и моментов равны нулю. При полной уравновешенности главная центральная ось инерции колеса (ГЦОИК) и ось его вращения (ОВ) совпадают. При неуравновешенных колесах различают 3 вида дисбаланса: статический, динамический и комбинированный (рис. 65).
Если ГЦОИК и ОВ колеса не совпадают, но взаимно параллельны, то имеет место статический дисбаланс. При статическом дисбалансе центр масс колеса смещен относительно ОВ на величину эксцентриситета (е). Причинами смещения центра масс может быть неравномерность распределения материала в элементах колеса в радиальном направлении (шине, ободе, ступице), неточности сборки, попадание инородного предмета в протектор шины, наличие заплаты на камере и др. Как показывает статистика, 55% дисбаланса дает шина, 15% обод и 30% ступица с тормозным
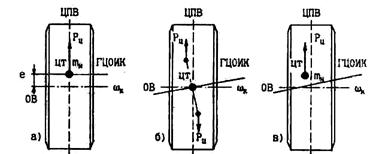
Рис. 65. Различные виды дисбаланса (неуравновешенности)
автомобильных колес:
а) статический Рц ¹ 0; Мц= 0; б) динамический Рц = 0; Мц ¹ 0;
в) суммарный Рц ¹ 0; Мц ¹ 0
барабаном. При вращении колеса, имеющего статический дисбаланс, возникает центробежная сила инерции, вектор которой направлен перпендикулярно оси вращения и приложен в центре масс:
Рцб = mкеwк2, (256)
где mк - масса колеса.
При статическом дисбалансе сумма моментов сил инерции относительно центра масс равна 0. Ликвидировать статический дисбаланс можно, закрепив соответствующую массу на ободе колеса таким образом, чтобы корректирующая масса создавала такую же по величине, но противоположно направленную силу инерции. В результате векторная сумма указанных сил окажется равной нулю, а центр тяжести колеса будет располагаться на оси вращения. Заметим, что ликвидация статического дисбаланса может вызвать динамический дисбаланс или изменить его величину (если он имеется).
Динамический дисбаланс имеет место тогда, когда ГЦОИК и ОВ колеса не совпадают, но пересекаются в центре масс. Отклонение ГЦОИК от ОВ на некоторый угол (рис. 65,б) объясняется несимметричностью распределения массы конструктивных элементов колеса относительно плоскости вращения, проходящей через центр масс колеса, т.е. сдвигом центров масс различных сегментов колеса относительно указанной плоскости. Причинами этого могут быть те же самые факторы, которые обусловливают и статический дисбаланс. В результате при динамическом дисбалансе сумма моментов центробежных сил инерции относительно центра масс отлична от 0, хотя их сумма равна 0. Образующаяся пара инерционных сил создает момент в плоскости, проходящей через ОВ. При этом плоскость, в которой действует указанная пара сил, вращается вместе с колесом, создавая знакопеременный момент, обусловливающий поперечные биения колеса. Для легковых автомобилей допустимое биение составляет 2 - 3 мм, для грузовых – 3 - 4 мм. Динамический дисбаланс, в отличие от статического, можно выявить лишь при вращении колеса. Для устранения динамического дисбаланса к ободу колеса прикрепляют корректирующие грузы, которые создают момент, аналогичный по величине, но противоположный по направлению.
В реальных условиях эксплуатации имеет место комбинированный (суммарный) дисбаланс. В этом случае центр тяжести колеса лежит вне ОВ (но на ГЦОИК), а сами оси скрещиваются или пересекаются (рис. 65,в).
Рассмотрим механизм возникновения угловых колебаний управляемых колес вследствие их статической неуравновешенности. При вращении статически неуравновешенного колеса возникает центробежная сила инерции, которую можно разложить на вертикальную и горизонтальную составляющие (рис. 66):
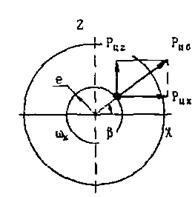
Рис. 66. Сила инерции при статическом дисбалансе
Рцz = Рцsinwкt = mкеwк2sinwкt; (257)
Рцх = Pцcoswкt = mкеwк2coswкt. (258)
Под действием силы Рцх колесо стремится повернуться относительно шкворня, а под действием силы Рцz – переместится в вертикальном направлении. Горизонтальная составляющая Рцх создает крутящий момент относительно оси шкворня (рис. 67), величина которого равна:
Мш = Рцхlц = Рцбlц cosb = mкеwк2 lцcoswкt, (259)
где lц - плечо действия силы инерции.
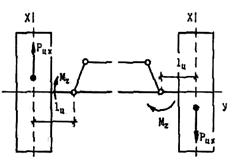
Рис. 67. Крутящие моменты на колесах при статическом дисбалансе
Учитывая, что величина дисбаланса Мдб = mкge, а wк = Vа/rк, получим:
Мш =  . (260)
. (260)
В условиях эксплуатации значение дисбаланса не должно превышать для легковых автомобилей 25 - 30 Нм, а грузовых и автобусов – 100 - 115 Нм. Для уменьшения дисбаланса на автозаводах, автотранспортных и авторемонтных предприятиях производят балансировку колес, доводя статический дисбаланс до приемлемых значений: 5 Нм - для легковых автомобилей; 20 - 30 Нм - для грузовых автомобилей и автобусов.
|
|
|
|
|
Дата добавления: 2014-01-06; Просмотров: 3073; Нарушение авторских прав?; Мы поможем в написании вашей работы!