КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Автоколебания управляемых колес
|
|
|
|
Явление автоколебаний управляемых колес (шимми) проявляется в том, что у автомобиля с вполне исправным рулевым управлением и уравновешенными колесами на ровной дороге в определенном диапазоне скоростей могут возникать незатухающие колебания колес относительно шкворней при полностью неподвижном рулевом колесе. Причиной возникновения автоколебаний является наличие гироскопической и упругой связи между колебаниями передней оси автомобиля в поперечной плоскости и колебаниями (поворотами) колес вокруг осей шкворней. Для возникновения колебаний необходим первоначальный толчок, получаемый при наезде колеса на неровность дороги (рис. 68).
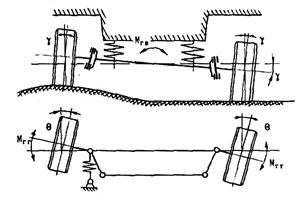
Рис. 68. Автоколебания управляемых колес автомобиля
При большой скорости автомобиля из-за быстрого вращения управляемых колес и резкого перекоса их осей на каждом из них возникает гироскопический момент, который действует в продольной плоскости, проходящей через переднюю ось:
Mгг = Jк wк , (261)
, (261)
где j - угол наклона (перекоса) оси вращения колеса (гироскопа).
Моменты Mгг при достаточной величине обеспечивают поворот управляемых колес вокруг осей шкворней на некоторый угол q. В свою очередь, поворот быстро вращающихся колес вокруг шкворней приводит к появлению гироскопического момента Mгв, но в поперечной плоскости (рис. 68):
Mгв = Jкwк , (262)
, (262)
где q - угол поворота управляемых колес.
Этот момент, в свою очередь, приводит к перекосу балки переднего моста, но уже в противоположную сторону. Этот перекос связан с неодинаковой радиальной деформацией шин вследствие перераспределения нормальных реакций между левым и правым колесом. Указанный перекос, в свою очередь, вызывает поворот управляемых колес в другую сторону и т.д.
Основным способом уменьшения шимми является применение независимой подвески управляемых колес, разрушающей гироскопическую связь между правым и левым колесом.
|
|
|
|
|
Дата добавления: 2014-01-06; Просмотров: 787; Нарушение авторских прав?; Мы поможем в написании вашей работы!