КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Состав и размещение РМСП
|
|
|
|
Назначение и классификация
Радиомаячные системы посадки (РМСП) предназначены для получения на борту ВС и выдачи экипажу и в САУ информации о величине и знаке отклонений ВС от номинальной траектории снижения, а также для определения моментов пролета характерных точек на траектории захода на посадку.
Разновидности РТС посадки:
- системы посадки ОСП (оборудование системы посадки);
- радиомаячные системы посадки метрового диапазона волн (РМСП МВ) – системы класса ILS и СП;
- радиомаячные системы посадки сантиметрового диапазона волн (МСП или MLS);
- радиолокационные системы посадки (РЛСП);
- спутниковые системы посадки (GLS).
Функциональные возможности
Упрощенные системы посадки (ОСП) обеспечивают вывод ВС на аэродром, выполнение предпосадочного маневра и определение места ВС в двух фиксированных точках на траектории посадки.
Радиомаячные системы посадки МВ позволяют задавать прямолинейную пространственную траекторию захода на посадку (рис.21а) и определять текущее положение ВС относительно ее, а также фиксировать моменты прохода двух или трех точек на линии глиссады, расположенных на определенном удалении от ВПП.
РМСП этого типа обеспечивают задание единственной траектории - глиссады планирования и управление ВС в пределах определенных, достаточно узких, секторов вокруг нее.
Радиомаячные системы посадки диапазона СМВ обеспечивают определение пространственных координат ВС в определенной области пространства, размеры которой значительно (рис.21б) превосходят сектора управлений существующих ныне РМСП, и позволять выполнение полетов по любой криволинейной четырехмерной пространственно-временной траектории посадки.

Радиолокационные системы посадки (РСП) являются высокоэффективных систем контроля процесса захода ВС на посадку. В состав оборудования РСП входят: посадочный радиолокатор (ПРЛ), обзорный радиолокатор (ОРРЛ), средства радиосвязи. Они используются для наземного контроля процесса захода на посадку и в случае необходимости передачи на борт с помощью систем воздушной связи указания о корректирующих маневрах относительно траектории захода.
Спутниковые системы посадки (GLS) предполагают использование для решения задач автоматической посадки дифференциальной глобальной спутниковой навигационной системы DGPS.
Система DGPS позволяет использовать два варианта автоматической посадки, полностью отвечающие требованиям точности при заходе на посадку и посадке по I категории ICAO.
Система LAAS (система наведения для местного региона). Несколько первых систем этого типа, известных как Scat-1 (система посадки специальной категории I), находятся в эксплуатации. В Российской Федерации система Scat-1 фирмы Honeywell с помощью Научно- производственного предприятия АВИТЕКС (Москва) будет устанавливаться на самолеты гражданской авиации общего пользования.
Система автоматической посадки WAAS (система наведения для большой площади перекрытия). Для обеспечения широкого использования спутниковой навигационной системы DGPS сеть ее наземных станции должна быть увеличена; потребуется коррекция линий передачи данных спутник - наземные станции и запуск геостационарного спутника с экваториальной орбитой. Для такого варианта спутниковой системы разрабатывается система автоматической посадки WAAS (система наведения для большой площади перекрытия). Подобные этой системе создается в Европе система EGNOS (Европейская спутниковая геостационарная навигационная система большой площади перекрытия) и японская система MTSAS (многоцелевая спутниковая система наведения). В процессе дальнейших испытаний предполагается сертифицировать систему WAAS по полным условиям I категории ICAO (высота принятия решения 60 м), а в более поздние сроки для требований II и III категорий ICAO
Состав оборудования РМСП зависит от категории аэродрома.
Система ОСП
На некатегорированных аэродромах устанавливают упрощенные системы посадки (ОСП) (рис.22). В их состав входят дальний и ближний приводные маркерные радиопункты (ДПРМ и БПРМ), оснащенные приводными радиостанциями (ПРС) и маркерными радиомаяками (МРМ). ДПРМ и БПРМ устанавливают на расстояниях соответственно 4000±20 и 1050±150 м от порога ВПП.
Дальний МРМ обеспечивает экипажу сигнализацию момента времени проверки высоты полета (по радиовысотомеру), расстояния до точки приземления и готовности бортовых систем к обеспечению полета на конечном этапе захода на посадку. Ближний МРМ сигнализирует момент времени проверки по РВ высоты принятия решения и переходе к визуальному этапу посадки.
Аэродромы оборудуют, кроме того, светосигнальными системами огней малой интенсивности, автоматическим радиопеленгатором (АРП) и обзорным радиолокатором.
Система РМСП
При установке на аэродроме РМСП состав оборудования и его эксплуатационные характеристики определяются соответствующими стандартами ИКАО [3].
ИКАО определены 3 категории критериев для посадочных систем. СП любой категории должна обеспечивать с высокой вероятностью успешный заход на посадку до нижнего предела высоты Hmin при дальности видимости на ВПП не менее Xmin. Значения Hmin и Xmin приведены в табл.3.
Радиомаячные системы инструментального захода воздушного судна на посадку подразделяются на системы первой, второй и третьей категорий ИКАО (PMC-I, РМС - II, РМС-III).
PMC-I обеспечивает информацией при заходе воздушного судна на посадку от границы зоны действия РМС до высоты принятия решения, соответствующей 60м над горизонтальной плоскостью проходящей через порог взлетно-посадочной полосы.
РМС-II обеспечивает информацией при заходе воздушного судна на посадку от границы зоны действия РМС до высоты принятия решения, соответствующей не менее 30м над горизонтальной плоскостью проходящей через порог взлетно-посадочной полосы.
РМС-III обеспечивает информацией при заходе воздушного судна на посадку от границы зоны действия РМС до поверхности взлетно-посадочной, автоматическое приземление, движение по ВПП и рулежным дорожкам.
Таблица 3
| Hmin, Xmin | Категория | ||||
| 3A | 3B | 3C | |||
| Hmin, м Xmin, м |
В РМСП МВ пространственная траектория (глиссада) планирования формируется курсовым и глиссадным радиомаяками (КРМ и ГРМ). Первый из них задает в пространстве вертикальную плоскость (плоскость курса), проходящую через ось ВПП, а второй - наклонную плоскость (плоскость глиссады), которая при пересечении с плоскостью курса дает линию глиссады (рис.23.).
На рис.24 представлена схема размещения РТС посадки на аэродроме и требования стандартов ИКАО к размещению элементов РМСП метрового диапазона волн.
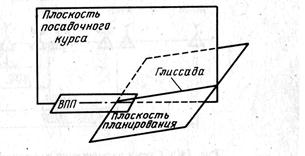
Рис.23. Плоскости курса и глиссады, задаваемые в РМСП
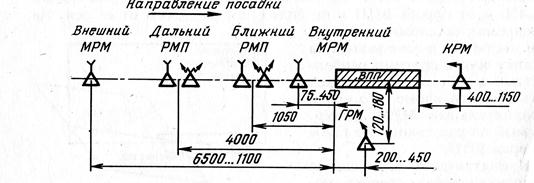
Рис.24. Схема размещения элементов РМСП на некоторых аэродромах СНГ
На аэродромах II и III категорий со сложным рельефом местности перед порогом ВПП в состав оборудования может дополнительно входить внутренний МРМ (ВМРМ), предупреждающий экипаж о близости порога ВПП. ВМРМ размещается на расстоянии 75 - 450 м от порога ВПП на продолжении осевой линии ВПП не более ± 30 м от нее. На аэродромах со сложным рельефом в зоне захода или другими особенностями в состав РМСП может быть включен дополнительный МРМ, размещенный на удалении до 11 км от торца ВПП.
Стандарты ИКАО предусматривают использование двух маркерных пунктов, называемых внешним (ВРП) и средним (СРП) и возможность, в случае необходимости, установки третьего, внутреннего. Средний МРМ предупреждает экипаж о приближении к точке начала визуального наблюдения, внутренний - для обозначения момента пролета ВПР в системах II категории.
Курсовой и глиссадный радиомаяки системы посадки устанавливаются относительно ВПП таким образом, чтобы высота опорной точки траектории посадки (точка О на оси ВПП над ее порогом) была равна 15-0+3 м.
Допускается вместо ближнего и/или дальнего маркерных радиомаяков РМС использование дальномерного радиомаяка, который устанавливается под углом не более 20°, образуемым траекторией захода на посадку и направлением на РМД-НП в точках, где требуется информация о дальности.
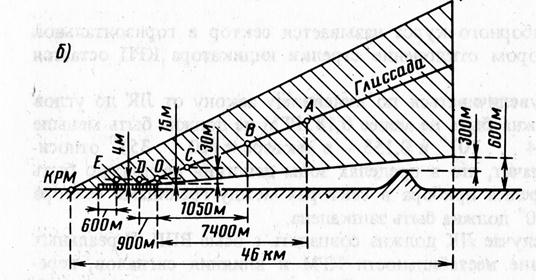
Рис. 25. Характерные точки на траектории захода
Помимо опорной точки глиссады планирования, в документах ИКАО отмечаются некоторые характерные точки на глиссаде (рис.25).
Типы РМСП, эксплуатируемые в настоящее время на аэродромах ГА, приведены в табл. 3.
В международных аэропортах устанавливают также РМСП типа ILS. По принципу действия и эксплуатационно-техническим характеристикам они аналогичны РМСП типа СП-70, СП-75,
СП-80,СП-90, СП-200.
Таблица 3
Наземное оборудование РМСП
| Параметр | Группа СП-50 | Группа ILS | |||
| СП-68 | СП-70 | СП-75 | СП-80 | СП-90 | |
| Категория Число МРМ | 1-2 | 1…3 2…3 | |||
| Среднее время наработки на отказ, ч | - |
|
|
|
|
|
Дата добавления: 2014-01-06; Просмотров: 5750; Нарушение авторских прав?; Мы поможем в написании вашей работы!