КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Корекція динамічних властивостей АСР
|
|
|
|
Підвищення якості автоматичних систем керування. Особливі системи.
Корекція – цілеспрямовані змінювання структури та параметрів АСР для забезпечення необхідних вимог щодо точності, якості або стійкості. Так для підвищення точності в усталених режимах за допомогою корекції можна збільшувати коефіцієнти передачі або порядку астатизму при збереженні стійкості та необхідних показників якості перехідних процесів. За допомогою корекції можливо надати стійкість також нестійким системам та розширити області стійкості і підвищення якості.
За способом включення ланок корекції розрізняють послідовні і паралельні (за допомогою зворотніх зв’язків) структури (рис.2.1). На рисунку позначено:
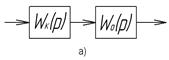
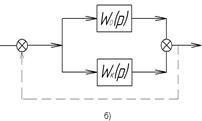
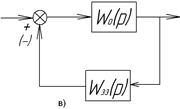
Рис.2.1. Способи включення ланок корекції; а) послідовно; б) паралельно; в) із зворотнім зв’язкомї
 - передаточна функція основних ланок системи;
- передаточна функція основних ланок системи;  - відповідно передаточні функції ланок корекції та зворотнього зв’язку.
- відповідно передаточні функції ланок корекції та зворотнього зв’язку.
Дія ланок корекції проявляється так:
- введення в систему сигналів за похідними чи інтегралами;
- охоплення зворотніми зв’язками окремих частин системи;
- введення сигналів за зовнішніми діяннями та їх похідними.
Для послідовних включень використовуються спеціальні ланки корекції:
Пропорційно – диференціальні;
Пропорційно – інтегральні;
Комбіновані.
Наприклад, для послідовного включення використовується пропорційно – диференціальна ланка з передаточною функцією:
 (2.1)
(2.1)
В передаточній функції (2.1) може бути і друга похідна, такі ланки можуть також з’єднуватись послідовно. Приймаючи до уваги, що передаточна функція розімкненої системи в цьому випадку буде:
 (2.2)
(2.2)
можна отримати характеристичний поліном:
 (2.3)
(2.3)
де:
 (2.4)
(2.4)
Часто  , тому введення пропорційно – диференційної ланки змінює коефіцієнт передачі системи, що приводить до зміни умов стійкості та показників якості, а саме: можна структурно нестійку систему перетворити на стійку. Коли послідовно з’єднані пропорційно – диференціювальна ланка корекції і аперіодична ланка, то:
, тому введення пропорційно – диференційної ланки змінює коефіцієнт передачі системи, що приводить до зміни умов стійкості та показників якості, а саме: можна структурно нестійку систему перетворити на стійку. Коли послідовно з’єднані пропорційно – диференціювальна ланка корекції і аперіодична ланка, то:
 (2.5)
(2.5)
Прехідна функція такого з’єднання буде:
 (2.6)
(2.6)
де:  - перехідна функція аперіодичної ланки.
- перехідна функція аперіодичної ланки.
На рис. 2.2. показані перехідні функції для різних значень  :
:
1- від’ємна дія за похідною;
2- додатня дія за похідною;
3- при збільшенні  в два рази;
в два рази;
4- для ідеальної безінерційної ланки;
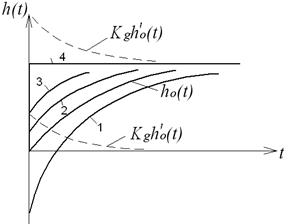
Рис.2.2. Перехідні функції системи.
Від’ємне діяння за похідною зменшує швидкодію, а додатнє – збільшує. Інерційність основної ланки частково компенсується, а при  виникає ідеальна безінерційна ланка (крива 4):
виникає ідеальна безінерційна ланка (крива 4):
 (2.7)
(2.7)
Для інерційних ланок довільного порядку необхідно вводити додаткові похідні, але похідні вище другого поряку практично не реалізуються. Додатня дія за похідною, тобто швидкістю змінювання вихідного сигналу збільшує його, поки він зростає та зменшує його (віднімання з нього), поки він зменшується. Таким чином, ця дія форсує протікання перехідного процесу, прискорює його. Від’ємна дія уповільнює перехідний процес.
Пропорційно – диференціальна ланка корекції є фільтром верхніх частот, тобто амплітуда вихідного сигналу зростає при зростанні частот, тому розширюється смуга пропускання частот.
Для послідовної корекції використовуються і спеціальні ланки з відповідими передаточними функціями:
- інтегральна
 (2.8)
(2.8)
- диференціальна
 (2.9)
(2.9)
- інтегрально – диференціальна
 (2.10)
(2.10)

Застосовуючи різні ланки корекції, можна змінювати властивості систем в потрібному напрямі. Інтегральні ланки корекції:
- пропускають низькі частоти і придушують високі, тобто стабілізують систему в області середніх і високих частот за рахунок зменшення коефіцієнта передачі;
- підвищують точність стійкої системи в усталених режимах. При цьому за рахунок зменшення коефіцієнта підсилення в області середніх частот можна для підвищення точності збільшувати загальний коефіцієнт передачі;
- зменшують зсув за фазою у вузькій області частот, тому за рахунок параметрів настройок можна отримати різні амплітудно – частотні характеристики в області суттєвих частот.
Диференціальні ланки корекції дозволяють:
- зменьшувати фазовий зсув в області частот зрізу;
- підвищити швидкодію системи, при цьому частота зрізу зміщується вправо по осі частот;
- найбільш суттєво стабілізувати систему при максимальному зсуві за фазою [+400;-400].
Інтегрально – диференціальні ланки мають більш широкі можливості, особливо в області середніх (суттєвих) частот.
Паралельні корекції – це фактично різні зворотні зв’язки. В першу чергу необхідно звернути увагу на фундаментальну властивість систем із зворотнім зв’язком (рис.2.3). Передаточна функція такого з’єднання буде:
 (2.11)
(2.11)
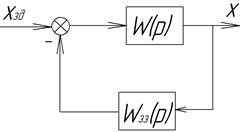
Рис.2.3. Охоплення елемента зворотнім зв’язком
Передаточну функцію  подамо у вигляді:
подамо у вигляді:  , тоді
, тоді
 (2.12)
(2.12)
Приймаючи коефіцієнт передачі достатньо великим  , наближено буде:
, наближено буде:
 (2.13)
(2.13)
тобто при великих значеннях коефіцієнта передачі динамічні властивості системи фактично визначаються властивостями зворотнього зв’язку і не залежать від властивостей прямої ділянки. (гранична система). Це особливо важливо, коли нестабільна, тоді зворотній зв’язок застосовується для стабілізації системи. Раніше розглядалась проблема формування потрібних законів керування за допомогою зворотніх зв’язків.
Розглянемо кілька прикладів, які виясняють вплив зворотніх зв’язків на властивості системи.
Приклад 1. Підсилювальна ланка охоплена гнучким зворотнім зв’язком, тоді:
 (2.14)
(2.14)
де 
Таким чином отримана астатична система з ПІ – законом (при  ).
).
Приклад 2. Аперіодична ланка охоплена жорстким зворотнім зв’язком, тоді:
 (2.15)
(2.15)
де 
Цей випадок характеризує роботу П – регулятора на об’єкті перщого порядку із самовирівнюванням. Видно, що зменшується інерційність системи, підвищується швидкодія.
Приклад 3. Інтегральна ланка охоплена жорстким зворотнім зв’язком, тоді:
 (2.16)
(2.16)
де 
Інтегральна ланка перетворюється в аперіодичну, але при додатньому зв’язку буде нестійка ланка.
Зворотнім зв’язком можуть охоплюватись окремі нестабільні ланки або елементи із значними коефіцієнтами передачі, а також системи вцілому. За рахунок зворотніх зв’язків можна зменшувати також порядок астатизму системи.
Для синтезу ланцюгів корекції частот використовуються логарифмічні частотні характеристики, для чого:
- будують бажану логарифмічну частотну характеристику (для мінімально-фазових систем достатньо побудувати амплітудно – частотну характеристику);
- будують логарифмічну амплітудно – частотну характеристику існуючої системи, яка складається з функціонально необхідних елементів;
- визначають логарифмічну амплітудно-частотну характеристику ланки корекції.
Наприклад, для послідовної ланки корекції передаточна функція системи буде:

 (2.17)
(2.17)
де  - відповідно передаточна функція вихідної системи і ланка корекції.
- відповідно передаточна функція вихідної системи і ланка корекції.
Тоді:
 (2.18)
(2.18)
а логарифмічна частотна характеристика ланки корекції буде:
 (2.19)
(2.19)
|
|
|
|
Дата добавления: 2014-01-06; Просмотров: 763; Нарушение авторских прав?; Мы поможем в написании вашей работы!