КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Загальні положення. Адаптивні системи автоматичного керування
|
|
|
|
Адаптивні системи автоматичного керування
В задачах керування стаціонарними об’єктами можна обмежитись такими алгоритмами оптимального керування, які визначають незмінну структуру та параметри пристрою керування (автоматичного регулятора). Передбачається, що існує достатній об’єм апріорної інформації щодо властивостей об’єкта та зовнішнього середовища. В той же час технологічні об’єкти керування є нестаціонарними, тобто їх параметри змінюються з часом, змінюються статичні та динамічні властивості в достатньо широкому діапазоні непередбачуваним чином. Об’єкти керування функціонують в умовах невизначеності, коли значно змінюються характеристики зовнішнього середовища, навантаження, якість сировини. Таким чином, завжди існує неповнота апріорної інформації, а також відсутні математичні моделі, які описують змінювані властивості об’єктів та зовнішнього середовища. В технологічних об’єктах, в яких, наприклад, відбуваються процеси теплообміну, змінюються коефіцієнти теплопередачі, що приводить до змінювання значень постійних часу та коефіцієнтів передачі. В таких умовах автоматичні регулятори, які розраховувались з урахуванням початкових значень параметрів об’єктів, не забезпечують потрібної якості процесів керування. Виникає об’єктивна необхідність змінювати алгоритми функціонування, створювати можливість пристосування (адаптації) системи керування до змінюваних умов функціонування. В цьому випадку частина частина інформації поповнюється в процесі функціонування системи. Часто свідомо йдуть на те, щоб система поповнювала інформацію в процесі функціонування, а на стадії проектування штучно створюються умови для адаптації.
Адаптивними автоматичними системами називають такі, в яких параметри пристроїв керування та (або) структура (алгоритми керування) автоматично цілеспрямовано змінюються для забезпечення необхідної якості функціонування у відповідності до прийнятого критерія в умовах невизначеності. Адаптивні системи застосовують тоді, коли складність нестаціонарного об’єкта керування сягає такого рівня, що вплив неповноти апріорної інформації стає настільки суттєвим, при якому неможливо забезпечити необхідну якість системи без її пристосування до змінюваних умов функціонування. Оптимізацію складних систем за допомогою адаптивних пристроїв керування називають автоматичною оптимізацією.
Адаптивні системи дозволяють розв’язувати ряд важливих задач керування:
- здійснити оптимізацію роботи об’єкта;
- забезпечити працездатність системи з необхідними показниками якості в умовах змінювання властивостей об’єкта;
- підвищити надійність та живучість складних систем, уніфікувати алгоритми керування для класів об’єктів;
- зменшити вимоги до процесу проектування систем за рахунок наступного поповнення інформації в процесі функціонування;
- здійснити дуальне керування з отриманням математичної моделі об’єкта в процесі експлуатації шляхом застосування спеціальних ідентифікаторів.
В першому наближенні визначити доцільність застосування адаптивних систем керування можна на основі аналізу функцій чутливості. Чутливість – властивість об’єкта змінювати режим роботи під впливом змінних в часі параметрів, тобто цим характеризується нестаціонарність об’єкта. Якщо в математичній моделі об’єкта є змінювані параметри ai(t), то розглядаються малі варіації параметрів  відносно початкових значень ai0. Це дає можливість встановити вплив цих параметрів на координати об’єкта. Запишемо ряд:
відносно початкових значень ai0. Це дає можливість встановити вплив цих параметрів на координати об’єкта. Запишемо ряд:
 (5.1)
(5.1)
Функцією чутливості називають вираз:
 (5.2)
(5.2)
Вплив варіацій параметрів на статичні і динамічні властивості системи називають параметричними збуреннями, а викликані ними відхилення координат – параметричними похибками. Якщо система зберігає свої властивості при певних параметричних збуреннях, її називають грубою або робастною. Чим менше значення функції чутливості, тим менші відхилення вихідних координат, тобто система грубіша, краща якість системи.
При ступінчастому координатному діянні додаткові відхилення координат будуть:
 (5.3)
(5.3)
Класифікацію адаптивних систем виконують за такими ознаками:
- за характером змін в основному пристрої керування: із самонастройкою, коли адаптація відбувається за рахунок змінювань параметрів регулятора при постійній його структурі; із самоорганізацією, коли адаптація здійснюється за рахунок зміни структури пристрою керування (регулятора);
- за характером дії: із стабілізацією якості, тобто критерій І=Ізад або І Ізад; з оптимізацією якості: І
Ізад; з оптимізацією якості: І Іextr;
Іextr;
- за методом пошуку екструмуму критерія якості: пошукові, безпошукові;
- за структурою: адаптивні системи з еталонними моделями (АСЕМ) і адаптивні системи з ідентифікацією об’єкта керування (АСІ).
Структура адаптивної системи із самонастройкою показана на рис.5.1.
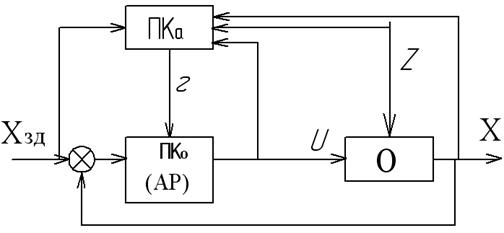
Рис.5.1. Структура адаптивної системи
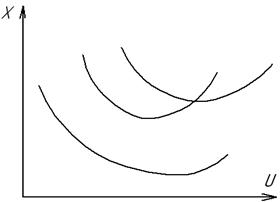
Рис.5.2. Статичні характеристики нестаціонарного об’єкта
Основний пристрій керування ПКо включений так, як у схемі регулювання за відхиленням з автоматичним регулятором АР. Пристрій керування адаптації ПКа отримує сигнали завдання Хзд, збурення Z, координат Х та керування U. Це дає можливість отримати інформацію щодо змінювань характеристик об’єкта та зовнішнього середовища, зокрема статичних характеристик за каналом керування x=f(u) (рис.5.2). В наведеній адаптивній системі можна виділити два канали керування: основний (координатний), який формує сигнал U, і адаптації (параметричний), який формує вектор параметрів ζ, часто це – коефіцієнт підсилення.
|
|
|
|
Дата добавления: 2014-01-06; Просмотров: 782; Нарушение авторских прав?; Мы поможем в написании вашей работы!