КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Остановимся на особенностях регулирования напряжения на якоре и обмотке возбуждения ДПТ НВ с помощью УВ
|
|
|
|
В связи с этим в настоящее время система Г-Д используется в основном в автономных устройствах, а в промышленных установках, получающих питание от электрических сетей, такая система почти не применяется.
Регулирование угловой скорости в системе генератор-двигатель (Г-Д)с обратной связью по скорости и токовой отсечкой
Отметим, что описанное влияние различных регуляторов на динамические свойства системы ЭП поясняет лишь качественный характер процессов. Вопрос о выборе того или иного тока регулятора и его параметров, как известно из курса теории автоматического управления, решается при синтезе корректирующих звеньев.
Упрощенная схема системы Г-Д приведена на рис. 3.17. Она содержит: двигатель постоянного тока независимого возбуждения М; генератор постоянного тока G, от которого получает питание якорь двигателя; усилитель мощности УМ, к выходу которого подключена обмотка возбуждение OBG генератора; регулятор, выполненный на операционном усилителя DА; задатчик частоты вращения RP; тахогенератор BR; датчик тока якоря – шунт Rh; стабилитроны VD1, VD2.
Генератор G приводится в движение приводным (гонным) двигателем (на схеме не показан). На промышленных предприятиях, где имеется сеть переменного тока, в качестве гонного двигателя используется асинхронный короткозамкнутый двигатель. В автономных установках, например на удаленных буровых установках, судах речного, морского флота, железнодорожного транспорта и тому подобное, в качестве приводного двигателя может служить двигатель внутреннего сгорания, паровая или газовая турбина и т.п.
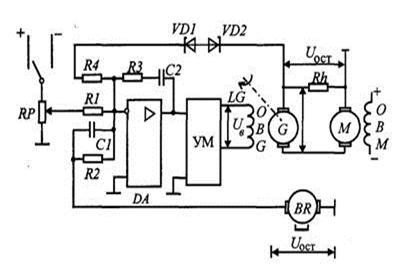
Рис. 3.17
Регулирование угловой скорости двигателя в схеме осуществляется путем изменения напряжения UЯ на якоре двигателя M, которое происходит за счет регулирования напряжения UВ на обмотке возбуждения генератора. Для согласования между напряжением и мощностью на выходе регулятора с потребной мощностью и напряжением питания обмотки OBG служит усилитель мощности, например транзисторный усилитель.
Стабилизация скорости двигателя достигается за счет отрицательной обратной связи по скорости. Так, если под действием возмущений ωд начинает снижаться, то уменьшается сигнал обратной связи по скорости Uocω, а сигнал ошибки, равный
Ud = Uзд – Uocω,
увеличивается. При этом повышается напряжение на выходе регулятора, на выходе УМ и на якоре двигателя. В результате ωд стремится к заданному значению. Точность стабилизации ωд, как показано выше, определяется коэффициентом усиления разомкнутой системы. При использовании регулятора, содержащего интегральную составляющую (например ПИД-регулятора, как на рис. 3.17), удается получить достаточно высокую точность стабилизации (см. первый участок характеристики на рис. 3.18).
Для ограничения тока якоря служит узел токовой отсечки. Один из возможных вариантов его реализации (см. рис. 3.17) включает шунт Rh и стабилитроны VD1, VD2. Этот узел работает так же, как описано в п. 3.1. Пока ток якоря Iя меньше тока отсечки Iотс, стабилитроны имеют большое сопротивление и не оказывают влияние на работу схемы. Если ток Iя превышает Iотс, то сопротивление стабилитрона резко снижается и на выход регулятора через резистор R4 начинает поступать дополнительный сигнал (Uост – UZ). При этом сигнал ошибки
Ud = Uзд – Uocω – (Uост – UZ). (3.16)
По мере увеличения тока якоря Iя растет напряжение Uост. Как следствие, снижается Ud, Uв, Uя, ωд. В результате достигается ограничение тока якоря (второй участок характеристик на рис. 3.18).
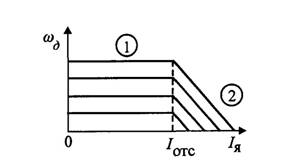
Рис. 3.18
К достоинствам схемы можно отнести простоту реверса двигателя и реализации рекуперативного торможения. Реверс осуществляется за счет изменения полярности напряжения на задатчике RP, что в конечном счете ведет к изменению полярности напряжения на якоре двигателя.
Генераторное торможение с отдачей энергии в сеть возможно, если в качестве гонного двигателя генератора используется электродвигатель, например асинхронный. Поясним это. Предположим, что машина работает на характеристике 1 (рис. 3.19) в т. а. Чтобы снизить скорость, напряжение на датчике RP снижают, и после переходного процесса машина должна перейти на характеристику 2 в т. в. Процесс перехода на новую характеристику протекает так. В первый момент времени wд, вследствие механической инерционности привода, остается неизменной (на рис. 3.19 процесс перехода условно показан стрелками). Напряжение генератора уменьшается и становится меньше противоЭДС двигателя. Ток в якорной цепи меняет знак. Машина M теперь работает генератором, а машина G – двигателем и заставляет гонный двигатель вращаться со скоростью выше скорости идеального холостого хода. Последний переходит в режим генератора и отдает электрическую энергию в сеть переменного тока. Если ток якоря превышает по модулю Iост, то в переходном процессе вступает в действие токовая отсечка и процесс перехода на новую характеристику от т. с до т. d идет при токе Iя = |Iотс|. Далее под действием момента сопротивления Мc механизма wд продолжает снижаться до нового установившегося режима в т. b.
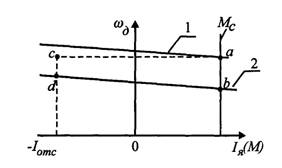
Рис. 3.19
Система Г-Д имеет очевидные недостатки. Прежде всего, это большая установленная мощность электрических машин: мощность генератора и гонного двигателя должны быть не меньше мощности двигателя. Т.е. общая установленная мощность электрических машин равна или превышает мощность двигателя в 3 раза. Кроме того, наличие дополнительных вращающихся машин приводит к снижению надежности, большим затратам на профилактику и ремонт. Значительная инерционность генератора затрудняет достижение высоких динамических характеристик системы.
3.6 Регулирование угловой скорости в системе управляемый выпрямитель – двигатель постоянного тока независимого возбуждения (УВ - ДПТ)
В настоящее время в различных областях техники наиболее широко применяются регулируемые электроприводы с ДПТ с управляемыми вентильными (тиристорными) выпрямителями (УВ).
Такие приводы выпускаются промышленностью в виде блочных изделий – комплектных тиристорных электроприводов. В однозонных приводах выход УВ подключается к якорю двигателя и регулирование скорости осуществляется за счет изменения напряжения на якоре ДПТ. В двухзонных ЭП используется два УВ, один работает на якорь, а второй – на обмотку возбуждения, и регулирование угловой скорости осуществляется как изменением напряжения на якоре, так и за счет изменения потока возбуждения (напряжения на обмотке возбуждения).
Основными приборами, применяемыми в управляемых выпрямителях, являются полупроводниковые вентили - диоды и тиристоры. Общим свойством этих приборов является то, что они могут находиться в двух состояниях - открытом и закрытом. В открытом состоянии прямое падение напряжения на вентилях в 102-103 раз меньше, чем напряжения, выделяемые на других элементах схемы (например, среднее значение прямого падения напряжения на тиристоре меньше 1 В). Ток, протекающий через вентили в закрытом состоянии, в 103-104 раз меньше тока в открытом состоянии. Все это позволяет при анализе электромагнитных процессов считать полупроводниковые вентили идеальными ключами и пренебрегать их прямыми падениями напряжения и обратными токами.
Полупроводниковый диод находится в открытом состоянии при прямом напряжении на его аноде (положительном относительно катода) и в закрытом - при отрицательном.
Для переключения тиристора в открытое состояние необходимо подать на его управляющий электрод (относительно катода) положительный управляющий импульс при прямом (положительном относительно катода) напряжении на аноде. Длительность управляющего импульса должна быть такой, чтобы за время его действия ток анода тиристора стал больше тока выключения. Для запирания тиристора необходимо уменьшить ток анода до величины тока выключения или приложить к его аноду обратное (отрицательное относительно катода) напряжение. Ток запирания тиристоров в 103-104 раз меньше его прямого тока, поэтому при анализе работы схем можно считать, что тиристор закрывается при нулевом значении тока анода.
|
|
|
Дата добавления: 2014-01-07; Просмотров: 644; Нарушение авторских прав?; Мы поможем в написании вашей работы!