КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Используя выражение (3.12), передаточную функцию рассматриваемого регулятора можно записать в виде
|
|
|
|
Выполнение же этого равенства означает, что регулируемая величина равна заданной, т.е. статистическая ошибка системы сведена к нулю. Отметим, что для сведения статистической ошибки к нулю нужен идеальный И-регулятор. В реальной схеме операция интегрирования выполняется с некоторой погрешностью, поэтому статистическая ошибка в замкнутой системе сводится хотя и не до нуля, но, как правило, до достаточно малых значений.
Передаточная функция соответствует интегрирующему (астатическому) звену.
При скачкообразном изменении сигнала Ud напряжение Uвых линейно нарастает (см. рис. 3.11). Учитывая свойства И-регулятора «накапливать» входной сигнал, можно дать следующие пояснение особенностям работы астатической системы. Если в системе появляется сигнал ошибки, то напряжение на выходе регулятора начинает изменяться и, соответственно, изменяется воздействие на двигатель. Этот процесс продолжается до тех пор, пока сигнал ошибки не будет сведен к нулю, т.е. пока не будет достигнуто равенство
Uос = Uзд.
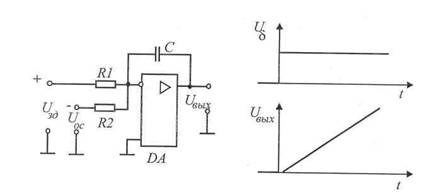
Рис. 3.10 Рис. 3.11
Алгоритмическая схема регулятора приведена на рис. 3.12. И-регулятор обеспечивает сравнение сигналов Uзд и Uос, а его выходное напряжение пропорционально интегралу от сигнала ошибки.
 .
.
Схема пропорционально-интегрального регулятора (ПИ-регулятора) приведена на рис. 3.13. В цепь обратной связи операциоионного усилителя последовательно включены резистор R3 и емкость С. На основании выражения (3.12) несложно найти передаточную функцию регулятора:
 , (3.13)
, (3.13)
где T = R3×C, Tи = R2×С – соответственно постоянные времени дифференцирующего и интегрирующего преобразований.
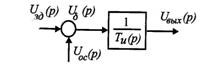
Рис. 3.12
Передаточную функцию (3.13) можно записать и в другом виде. Разделив почленно числитель на знаменатель, получим
 ,
,
где K=T/Tи – коэффициент усиления пропорциональной части регулятора.
Как следует из последнего выражения, передаточную функцию можно представить в виде суммы пропорциональной части (П) и интегральной (И) части. Отсюда название регулятора. Реакция ПИ-регулятора на скачкообразное изменение сигнала (Uзд – Uoc) приведена на рис. 3.14. Сравнивая рис. 3.12 и рис. 3.14, можно отметить, что
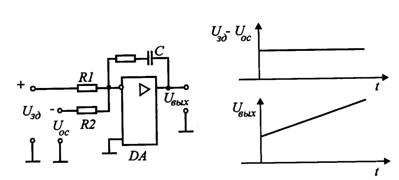
Рис. 3.13 Рис. 3.14
ПИ-регулятор в первый момент времени более «энергично» воздействует на управляемый преобразователь и, соответственно, двигатель. Благодаря этому, в принципе, быстродействие системы может быть улучшено.
Схема пропорционально-интегрально-дифференциального регулятора (ПИД-регулятора) приведена на рис. 3.15. По сравнению с предыдущей схемой здесь добавлены емкости С2 и С3, включенные параллельно резисторам R1, R2. Иногда емкость включают только параллельно R2. Тогда для сигнала обратной связи схема имеет свойства ПИД- регулятора, а для сигнала задания – свойства ПИ- регулятора.
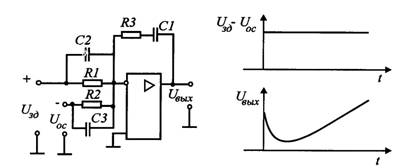
Рис. 3.15 Рис. 3.16
 , (3.14)
, (3.14)
где постоянные времени дифференцирования Т1, Т2 и интегрирования Ти определяются соотношениями:
Т1 = R3×C1; T2 = R2×C3; Tи = R2×C1.
Раскрыв скобки в числителе (3.14) и деля почленно числитель на знаменатель, получим передаточную функцию ПИД- регулятора в виде:
 , (3.15)
, (3.15)
где K = (T1 + T2)/Tи; T = T1×T2/Tи.
Как следует из последнего выражения, передаточная функция может быть представлена в виде суммы трех слагаемых: первое слагаемое – пропорциональное звено, второе – интегральное, третье – дифференциальное. Это определило название регулятора.
Реакция ПИД-регулятора на скачок сигнала (Uзд – Uос) приведена на рис. 3.16. Можно отметить, что в начальный момент времени при появлении сигнала рассогласования ПИД-регулятор обеспечивает ещё более «энергичное» воздействие, чем ПИ- регулятор (см. рис. 3.14)
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 361; Нарушение авторских прав?; Мы поможем в написании вашей работы!