КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Механические характеристики и способы регулирования скорости двигателей постоянного тока последовательного и смешанного возбуждения
|
|
|
|
В системе Г-Д преобразовательной установке свойственна естественная рекуперация энергии в сеть в генераторных режимах работы двигателя, в тиристорных преобразователях для обеспечения рекуперации необходимо применение специальных схем, в частности с двумя комплектами вентилей, что повышает сложность и стоимость электропривода.
При работе тиристорного привода искажается форма кривой напряжения в сети переменного тока и возникают помехи в сети, действующие как на другие электроприемники, так и на сам тиристорный привод;
Перегрузочная способность тиристорного преобразователя ниже, чем генераторного;
При глубоком регулировании скорости тиристорный электропривод имеет низкий коэффициент мощности;
Значительные пульсации тока на выходе УВ увеличивают нагрев двигателя и ухудшают его коммутацию;
Малые габариты и масса, блочная компоновка привода позволяют сократить требуемые производственные площади, уменьшить капитальные затраты на установку.
Электропривод имеет высокую надежность, достаточно прост в обслуживании;
Тиристорный преобразователь имеет очень малую инерционность, что позволяет обеспечить высокое быстродействие электропривода;
Достоинства и недостатки электроприводов с управляемыми выпрямителями
Отметим основные особенности приводов, выполненных по схеме УВ – ДПТ НВ:
3) тиристорный электропривод имеет высокий КПД (более 95%);
В то же время, тиристорным электроприводам свойственны следующие недостатки:
4.1 Электромеханические и механические характеристики ДПТ последовательного возбуждения (ПВ)
Схема подключения ДПТ ПВ приведена на рис. 4.1. В отличие от ДПТ независимого возбуждения здесь обмотка возбуждения ОВМ включена последовательно с якорем и через ОВМ протекает ток якоря Iя.
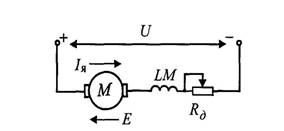
Рис. 4.1
Исходные выражения для электромеханической, механической характеристик и момента ДПТ ПВ можно записать в том же виде, что и для ДПТ независимого возбуждения (см. уравнения (2.3) - (2.5)):
ωд =  ; ωд =
; ωд =  ; (4.1)
; (4.1)
М = сФIя.
В отличие от ДПТ НВ в этих выражениях сопротивление Rя включает в себя и сопротивление обмотки возбуждения. Второе, наиболее важное отличие, заключается в том, что магнитный поток Φ является функцией тока якоря. Зависимость магнитного потока Φ от тока не является аналитической кривой (рис. 4.2), что не позволяет получить аналитические выражения для электромеханической и механической характеристик ДПТ ПВ. Приведенные уравнения позволяют провести лишь качественный анализ.
Естественные электромеханическая и механическая характеристики двигателя показаны на рис. 4.2, рис. 4.3, кривые 1. Очевидно, что при Iя =0 магнитный поток также равен нулю, и угловая скорость за счет первого слагаемого в выражениях (4.1) стремится к бесконечности (как говорят, двигатель идет «вразнос»), т. е. режим холостого хода для ДПТ ПВ является недопустимым.

Рис. 4.2 Рис. 4.3

Рис. 4.4
При возрастании тока якоря магнитный поток Ф вначале растет примерно пропорционально току якоря, а скорость резко снижается (крутопадающий участок на характеристиках).
При больших токах двигатель работает в зоне, близкой к насыщению, поэтому его магнитный поток здесь мало меняется при изменении тока и характеристика становится более жесткой, приближаясь по виду к характеристике ДПТ НВ.
На практике для расчетов используют так называемые универсальные характеристики ДПТ ПВ, которые приводятся в каталогах.
4.2 Способы регулирования угловой скорости ДПТ ПВ
Для ДПТ ПВ, как и для ДПТ НВ, возможны три основных способа регулирования скорости: 1) введением добавочных сопротивлений в цепь якоря; 2) изменением подводимого напряжения; 3) изменением потока возбуждения.
Регулирование угловой скорости введением добавочных сопротивлений является простейшим способом регулирования и широко используется в подъемных и транспортных механизмах. Как следует из уравнений (4.1), при увеличении добавочного сопротивления Rд второе слагаемое в этих выражениях увеличивается, т.е. увеличивается падение скорости от нагрузки. Соответственно электромеханическая и механическая характеристики в области больших токов становятся более крутопадающими (кривые 2 на рис. 4.2, рис. 4.3 - характеристики с Rд). Введение добавочных сопротивлений в цепь якоря ДПТ ПВ позволяет, как и для ДПТ НВ, регулировать скорость в относительно небольшом диапазоне и ограничить ток якоря при пуске. Обычно величину добавочных сопротивлений изменяют ступенями с помощью релейно-контакторной аппаратуры, как изложено в п. 2.2.
Основные недостатки такого регулирования – значительные потери энергии в добавочном сопротивлении, небольшой диапазон регулирования, ступенчатость регулирования.
Регулирование угловой скорости изменением подводимого напряжения может быть осуществлено так же, как для ДПТ НВ, с помощью отдельного генератора или тиристорного преобразователя. Регулирование ведется уменьшением подводимого напряжения и приводит, как следует из уравнений (4.1), к снижению скорости. В транспортных механизмах часто два тяговых двигателя одинаковой мощности работают как многодвигательный электропривод (например двухосный тяговый электропривод). При этом появляется дополнительная возможность ступенчатого изменения подводимого к двигателю напряжения за счет переключения двигателей с последовательного включения на параллельное. При последовательном включении на каждый двигатель приходится половина напряжения сети. Когда двигатели подключаются параллельно, каждый из них оказывается включенным на полное напряжение сети. Такое регулирование позволяет исключить нерациональную трату энергии.
Регулирование угловой скорости ослаблением потока возбуждения позволяет, как и для ДПТ НВ, получить скорости выше основной. Действительно, как следует из уравнений (4.1), уменьшение потока Φ приводит при том же токе якоря к возрастанию первого слагаемого. Ослабление потока возбуждения обычно осуществляют за счет шунтирования обмотки возбуждения добавочным сопротивлением.
Из анализа механических характеристик ДПТ ПВ следует, что они являются весьма удобными для электрической тяги (трамвай, метро, троллейбус, электровозы, тепловозы) и подъемных механизмов по следующим соображениям:
1) двигатель имеет низкую скорость при больших нагрузках и высокую - при малых, тем самым обеспечивается естественное регулирование скорости движения при изменении сопротивления перемещению;
2) транспортные и грузоподъемные механизмы требуют больших начальных моментов при пуске, именно такие моменты обеспечивает ДПТ ПВ; у ДПТ НВ момент пропорционален току - М ~ I, а у двигателей последовательного возбуждения М ~ I 2. А так как при пуске двигателя I = (1,5…2,0) I н, то двигатели последовательного возбуждения развивают значительно больший пусковой момент по сравнению с ДПТ НВ;
3) момент ДПТ ПВ не зависит от напряжения питающей сети, что особенно важно для электрической тяги, где в контактной сети могут возникать большие отклонения напряжения.
Основным недостатком характеристик ДПТ ПВ является неограниченное возрастание скорости при малых токах якоря и, как следствие, невозможность обеспечить режим генераторного торможения.
4.3 Тормозные режимы ДПТ ПВ
Для ДПТ ПВ возможны два тормозных режима: торможение противовключением и динамическое торможение.
При торможении противовключением в цепь якоря вводится добавочное сопротивление для ограничения тока якоря. Механические характеристики при этом являются продолжением характеристик двигательного режима в области отрицательной угловой скорости (см. рис. 4.2, рис. 4.3). Такой режим торможения, как и для ДПТ НВ, может возникать, когда момент на валу двигателя превышает значение М1 (рис. 4.3).
Динамическое торможение ДПТ ПВ может осуществляться двумя способами: с самовозбуждением и с независимым возбуждением. При использовании первого способа якорь и обмотка возбуждения отключаются от сети и замыкаются на добавочное сопротивление (рис. 4.4). При этом обмотку возбуждения или якорь переключают так, чтобы направление тока в обмотке возбуждения не изменилось. Если этого не сделать, то произойдет размагничивание машины.
При использовании второго способа - динамического торможения с независимым возбуждением - обмотку якоря замыкают на добавочное сопротивление, а на обмотку возбуждения подают напряжение от источника. Схема включения при этом аналогична схеме динамического торможения ДПТ НВ (рис. 2.14), аналогичны и получаемые тормозные характеристики.
Оба рассмотренных тормозных режима ДПТ ПВ малоэкономичны, так как энергия теряется на добавочных сопротивлениях.
В транспортных средствах очень важно обеспечить отдачу (рекуперацию) электроэнергии в сеть, например при движении на спуске. Однако, как уже отмечалось, генераторное торможение ДПТ ПВ невозможно. Чтобы решить эту проблему, в электротяге используют переключение обмотки возбуждения ДПТ с последовательного на независимое. Для этого отключают обмотку возбуждения от якоря и подают на нее через добавочное сопротивление напряжение сети. В результате машина работает с независимым возбуждением. Генераторное торможение такой машины рассмотрено в пп. 2.5, 3.5.
4.4 Механические характеристики и регулирование скорости ДТП смешанного возбуждения (СВ)
Схема подключения ДТП СВ приведена на рис. 4.5. Машина имеет две обмотки возбуждения: последовательную ОВМ1 и независимую ОВМ2.
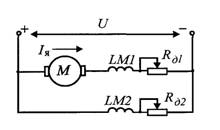
Рис. 4.5
Уравнения для электромеханической и механической характеристик двигателя аналогичны соответствующим уравнениям для ДТП ПВ:
ωд = ; ωд = . (4.2)
Причем здесь магнитный поток определяется как сумма магнитных потоков Φ1 – обмотки ОВМ1 и Φ2 – ОВМ2:
Φ = Φ1 + Φ2.
Для ДТП СВ, в отличие от ДПТ ПВ, скорость идеального холостого хода имеет конечное значение и определяется потоком Φ2:
ω0 =  .
.
Механическая характеристика двигателя смешанного возбуждения (кривая 3 на рис. 4.6) занимает промежуточное положение между характеристикой ДПТ НВ – кривая 1 и характеристикой ДПТ ПВ – кривая 2. Скорость ДПТ СВ при малых нагрузках изменяется значительно. А при больших нагрузках характеристика достаточно жесткая и близка к линейной, как у ДПТ НВ (см. соответствующие пояснения в п.2.4.1).
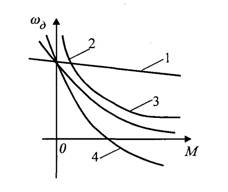
Рис. 4.6
Для ДПТ СВ возможны те же тормозные режимы, что и для ДПТ НВ: 1) генераторное; 2) динамическое; 3) противовключением.
Генераторное торможение соответствует участку характеристики при скорости больше ω0. При переходе в режим генераторного торможения ток в якоре и в обмотке последовательного возбуждения меняет свой знак, что может размагнитить машину. Поэтому при возрастании скорости до ω0 ОВМ1 обычно шунтируют, и машина работает как ДПТ НВ.
Для динамического торможения якорь двигателя замыкают на добавочное сопротивление, а ОВМ1 отключают, чтобы избежать размагничивания. В результате машина работает как ДПТ НВ и имеет такие же тормозные характеристики.
При торможении противовключением в цепь якоря вводят добавочное сопротивление, ограничивающее ток якоря. Характеристика при этом становится более мягкой (кривая 4 на рис. 4.6). Машина переходит в режим противовключения при отрицательных значениях скорости.
Регулирование скорости ДПТ СВ так же, как ДПТ ПВ, может осуществляться: 1) изменением подводимого напряжения; 2) введением добавочного сопротивления в цепь якоря; 3) изменением потока последовательной обмотки возбуждения. Кроме того, для ДПТ СВ появляется дополнительная возможность регулирования скорости изменением потока независимой обмотки возбуждения.
Из рассмотренного следует, что ДПТ СВ имеют характеристики, весьма удобные для тягового электропривода. По сравнению с ДПТ ПВ машины со смешанным возбуждением позволяют обеспечить генераторное торможение и регулирование скорости потоком обмотки независимого возбуждения.
ЗАКЛЮЧЕНИЕ
В настоящее время в промышленности и на транспорте в качестве регулируемого электропривода получил широкое применение электропривод постоянного тока, основные сведения о котором рассмотрены в учебном пособии.
Рассмотренные вопросы, конечно же, не исчерпывают всего многообразия применяемых и перспективных электромеханических преобразователей и электроприводов.
В 50-е годы прошлого столетия большие надежды возлагались на частотно-регулируемый электропривод с асинхронным двигателем с короткозамкнутым ротором.
Асинхронный двигатель по своим эксплуатационным свойствам, массогабаритным показателям значительно превосходит двигатель постоянного тока и имеет более низкую стоимость. Однако необходимость выпрямителей и достаточно сложных преобразователей частоты в значительной мере ослабляет эффект снижения стоимости и массогабаритных показателей регулируемого электропривода с асинхронным двигателем.
Поэтому регулируемый электропривод с машиной постоянного тока и в настоящее время во многих областях техники является конкурентоспособным с частотно-регулируемым электроприводом. Подтверждением этому может служить и тот факт, что с 60-х годов промышленно развитые страны каждые 5-7 лет в 2 раза увеличивают выпуск машин постоянного тока.
Известные достоинства коллекторных машин постоянного тока: высокая плотность энергии и отличные регулировочные характеристики, по-видимому, гарантируют их широкое использование в обозримом будущем.
|
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 2919; Нарушение авторских прав?; Мы поможем в написании вашей работы!