КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Лекция 4. На качество работы следящей системы оказывают влияние следующие факторы (изменяющие величину ошибки):
|
|
|
|
.
На качество работы следящей системы оказывают влияние следующие факторы (изменяющие величину ошибки):
1) Обычно неконтролируемое возмущающее воздействие f(t),
2) Параметры и характеристики объекта управления, как правило, известны неточно и изменяются в процессе функционирования системы (во времени),
3) Шум измерения (наблюдения) s(t) искажает результаты измерения управляемой величины, из-за него наблюдаемый сигнал не дает полного представления о состоянии объекта управления (управляемой величины).
Перечисленные факторы называют возмущениями. Возмущения приводят к нежелательному отклонению управляемой величины относительно заданного значения (задающего воздействия). САУ строят так, чтобы возмущения влияли как можно меньше на свойства системы. Системы, малочувствительные к возмущениям, называют робастными.
4) Диапазон изменения управляющего воздействия u(t) является ограниченным. Часто  (например, напряжение двигателя не должно превышать номинальное значение, вентили можно лишь открыть или закрыть),
(например, напряжение двигателя не должно превышать номинальное значение, вентили можно лишь открыть или закрыть),
5) Объект управления может оказаться неустойчивым,
6) Инерционность объекта управления не позволяет добиться желаемой скорости реакции на внешние воздействия.
Если v(t) – заданная функция:  , то говорят о задаче программного управления, а система называется системой программного управления.
, то говорят о задаче программного управления, а система называется системой программного управления.
Если  , то задача управления называется задачей регулирования или задачей стабилизации. Система, с помощью которой решается эта задача, называется системой автоматической стабилизации или системой автоматического регулирования (САР).
, то задача управления называется задачей регулирования или задачей стабилизации. Система, с помощью которой решается эта задача, называется системой автоматической стабилизации или системой автоматического регулирования (САР).
3. Основные принципы управления.
Применяют два основных принципа управления: один из них приводит к разомкнутой системе, второй – к замкнутой системе.
|
|
|
1. Разомкнутая система (система без ОС)
К ней приходим, используя:
а) управление с прямой связью,
б) управление по возмущению.
а) управление с прямой связью,
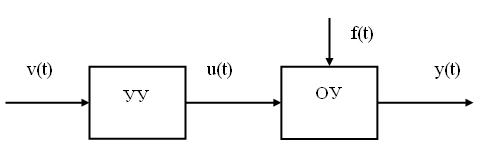
Функциональная схема разомкнутой системы – последовательное соединение УУ и ОУ.
Из основной задачи управления следует, что управляющее устройство УУ должно быть спроектировано так, чтобы y(t) было близко к v(t).
Правило (алгоритм) преобразования информации о внешних и внутренних воздействиях (сигналах) в управляющее воздействие u(t) называется законом управления. Для управления с прямой связью закон управления в общем случае имеет вид
 ,
,
где Fр – оператор, показывающий, какие действия нужно совершить над v(t)- внешнее воздействие, чтобы получить u(t).
Т.к. сигналы распространяются в одном направлении от входа к выходу – система разомкнутая (последовательное соединение элементов).
Для получения y(t) ≈ v(t), нужно выбрать характеристики УУ так, чтобы они были обратными характеристикам ОУ, т.е. УУ должен представлять собой инверсный ОУ. Например, если ОУ по своим свойствам интегратор, то УУ должен быть дифференциатором. Такое управление называется инверсным управлением.
Недостатки: разомкнутым системам присуще низкое качество управления в силу того, что, во-первых, они весьма чувствительны к изменению свойств ОУ, во-вторых, не могут обеспечить снижение влияния возмущающих воздействий, в-третьих, их нельзя использовать для управления неустойчивыми ОУ, в-четвертых, форсированное управление, используемое в связи с инерционностью ОУ, приводит к недопустимо большим значениям управляющего воздействия u(t).
б) Принцип Понселе-Чиколева: управление по возмущению.
Такой принцип управления позволяет повысить качество разомкнутой системы за счет уменьшения влияния основного измеряемого (контролируемого) возмущающего воздействия f(t). При этом закон управления имеет вид- f1(t) и v(t) – внешние воздействия:
|
|
|
 .
.
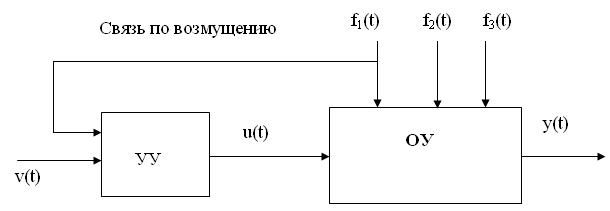
Для функциональной схемы системы в данном случае характерно наличие связи по возмущению, с помощью которой вводится в УУ информация об измеряемом возмущающем воздействии.
Как видим, u(t) зависит как задающего воздействия v(t), так и от измеряемого возмущающего воздействия f1(t). При этом в принципе можно построить инвариантные к возмущающему воздействию системы, т.е. системы, в которых y(t) не зависит от f1(t).
Однако другие недостатки, присущие разомкнутым системам, к сожалению, сохраняются. В частности, не удается уменьшить влияние неконтролируемых возмущающих воздействий f2(t) и f3(t).
Выгодно отличаются от разомкнутых систем замкнутые системы (системы с ОС).
2. Замкнутые системы (системы с обратной связью (ОС))
Остановимся на двух законах управления, широко используемых в замкнутых системах.
а) Управление с прямой и обратной связью.
Функциональная схема замкнутой системы: 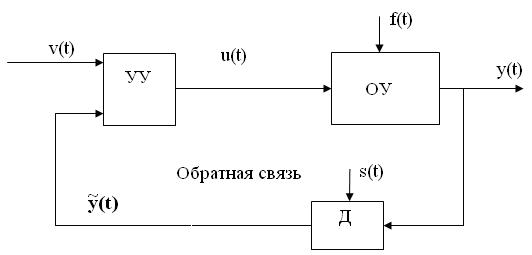
В данной системе применяется информация о результатах управления. Она заключена в сигнале ОС. Информацию содержит наблюдаемый сигнал  .
.
Закон управления с прямой и обратной связью:
 .
.
Заметим, что используется только информация прошлая и текущая (в настоящий момент времени).
Замкнутые системы обладают более высоким качеством и большей точностью, чем разомкнутые, т.к.:
1) Уменьшает влияние неопределенности и изменчивости свойств ОУ на управляемую величину (обеспечивают робастность).
2) Снижают эффект, обусловленный возмущающим воздействием.
3) Позволяют изменять/ускорять реакцию системы на задающее воздействие.
4) Дают возможность управлять неустойчивыми ОУ.
К недостаткам замкнутых систем следует отнести проблемы, порождаемые обратной связью, а именно, обеспечение а) устойчивости (обратная связь может дестабилизировать систему) и б) помехоустойчивости (возникает задача уменьшения влияния шума измерения).
Управляющее устройство проектируется так, чтобы обеспечить компромисс между требованиями, предъявляемыми к робастности, точности воспроизведения задающего воздействия, виду реакции на внешние воздействия, и устойчивостью системы.
|
|
|
б) Принцип управления по ошибке (по отклонению)
Этот принцип называют принципом Ползунова-Уатта.
Пусть  и ошибка
и ошибка  .
.
Тогда закон управления по ошибке имеет вид:

Функциональная схема системы, в которой используется закон управления по ошибке:
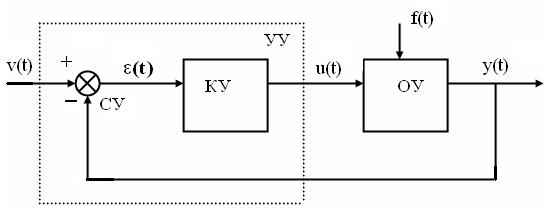
Управляющее устройство (УУ) состоит из сравнивающего устройства (СУ), определяющего ошибку управления (разность между желаемым и действительным значениями управляемой величины), и корректирующего устройства (КУ), вырабатывающего управляющее воздействие.
Философия таких систем весьма прозрачна:
Независимо от причины возникновения ошибки УУ система стремится свести эту ошибку к нулю. В сущности, управляющее устройство работает, используя лингвистические правила:
Если ошибка больше нуля, то управление положительное,
Если ошибка меньше нуля, то управление отрицательное,
Если ошибка равна нулю, то управление равно нулю.
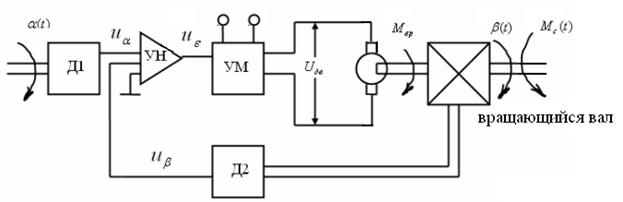
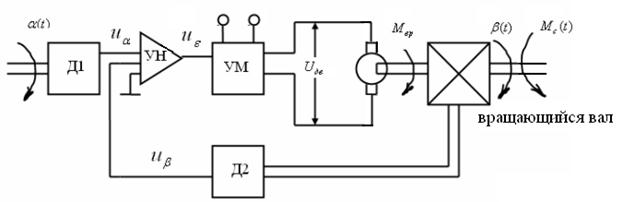
Пример. Электромеханическая следящая система.
Здесь  (t) - момент сопротивления,
(t) - момент сопротивления,  (t) - момент вращения.
(t) - момент вращения.
Двигатель с вращающим валом является ОУ. Цель управления состоит в обеспечении примерного равенства углов поворота задающей оси и следящего (вращающегося) вала, т.е.  , причем угол
, причем угол  изменяется случайным образом. С помощью датчика Д1 в систему вводится информация о цели управления. Задающий сигнал
изменяется случайным образом. С помощью датчика Д1 в систему вводится информация о цели управления. Задающий сигнал  , где - коэффициент пропорциональности. За счет датчика Д2 система получает информацию о результатах управления. Его выходная величина
, где - коэффициент пропорциональности. За счет датчика Д2 система получает информацию о результатах управления. Его выходная величина
пропорциональна управляемой величине  и является сигналом ОС.
и является сигналом ОС.
Дифференциальный усилитель напряжения (УН) служит для вычисления разности напряжений  и
и  , и ее последующего усиления с коэффициентом
, и ее последующего усиления с коэффициентом  , так что его выход
, так что его выход

 .
.
.
С учетом выражений для и сигнал рассогласования
оказывается пропорциональным отклонению (ошибке, рассогласованию)
 .
.
К двигателю подводится управляющее воздействие
 ,
,
представляющее собой преобразованный усилителем мощности (УМ) c коэффициентом усиления  сигнал рассогласования. Как видим, управляющее воздействие пропорционально ошибке, где коэффициент пропорциональности
сигнал рассогласования. Как видим, управляющее воздействие пропорционально ошибке, где коэффициент пропорциональности  =
= . Следовательно, в системе используется принцип управления по ошибке.
. Следовательно, в системе используется принцип управления по ошибке.
|
|
|
Система работает следующим образом.
Если  >0, то
>0, то  >
> , при этом сигнал рассогласования
, при этом сигнал рассогласования  >0, усиленный УН и УМ, поступает на двигатель, как
>0, усиленный УН и УМ, поступает на двигатель, как  >0, создается момент, ускоряющий вращение вала в необходимую сторону, и вращающийся вал начинает «догонять» задающий вал; если ошибка отрицательна <0, >, при этом <0, то <0, то к валу двигателя прикладывается момент противоположного знака, и следящий вал тормозится.
>0, создается момент, ускоряющий вращение вала в необходимую сторону, и вращающийся вал начинает «догонять» задающий вал; если ошибка отрицательна <0, >, при этом <0, то <0, то к валу двигателя прикладывается момент противоположного знака, и следящий вал тормозится.
Для данной системы возмущающим воздействием является момент сопротивления (нагрузки) на валу двигателя.
В описанной простейшей системе функции управляющего устройства сводятся к вычитанию сигналов двух датчиков и умножению разности (сигнала ошибки) на постоянный коэффициент, равный произведению коэффициентов усиления усилителей напряжения и мощности. Как мы убедимся в дальнейшем, для высокого качества управления (малости ошибки) приходится усложнять эти функции, вводя в закон управления производные и интегралы от ошибки.
в) Управление с внутренней моделью
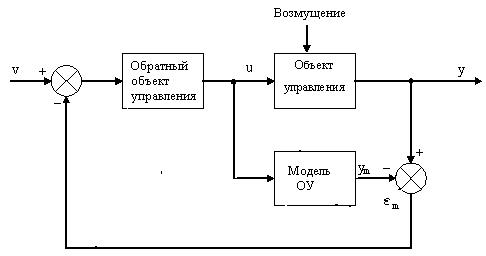
При управлении с внутренней моделью (cм. рисунок выше) модель объекта управления располагается параллельно с реальным объектом управления ОУ. Главная особенность данной системы управления, по сравнению с классическими системами с обратной связью, – это то, как она обрабатывает разность между выходным сигналом ym модели и выходом (управляемой величиной) реального объекта у. Данная разность em=y-ym характеризует собой ошибку моделирования (другими словами неточность и неопределенность модели) и (или) неконтролируемые возмущения объекта управления. Она (разность) по цепи обратной связи поступает в КУ, представляющее собой обратную модель ОУ (обратный объект управления), и используется для компенсации возмущения или (и) ошибки моделирования. Если модель является идеальной, то em =0 и обратнаясвязь в отсутствие возмущений не работает, и выход y(t)=v(t).
Свойства управления с внутренней моделью таковы, что эта часть управляющего устройства должна быть связана с инверсией модели ОУ.
г) Адаптивное управление
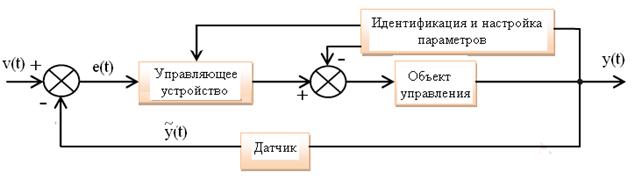
В ряде систем управления некоторые параметры объекта не являются постоянными и изменяются по неизвестному закону. Если эти изменения достаточно велики и происходят достаточно быстро, то желательно, чтобы система обладала способностью непрерывно измерять влияние изменения параметров на управляемую величину и настраивать управляющее устройство так, чтобы всегда удовлетворялись требования к качеству. Такие системы называются адаптивными системами управления.
|
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 567; Нарушение авторских прав?; Мы поможем в написании вашей работы!