КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Работа силы упругости
|
|
|
|
Рассмотрим пружину АВ1 конец А которой закреплен неподвижно (рис. 139, а).
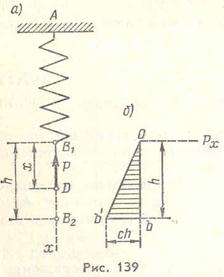 При растяжении пружины в ней возникают силы упругости и на тело, вызывающее растяжение, действует реакция пружины Р. Эта сила направлена противоположно перемещению свободного конца пружины, а ее модуль пропорционален удлинению пружины
При растяжении пружины в ней возникают силы упругости и на тело, вызывающее растяжение, действует реакция пружины Р. Эта сила направлена противоположно перемещению свободного конца пружины, а ее модуль пропорционален удлинению пружины  ,
,
где с — коэффициент жесткости пружины.
Направим ось Х по оси пружины, приняв за начало координат конец недеформированной пружины В1. Проекция силы упругости  на ось Х:
на ось Х: 
Вычислим работу силы упругости на перемещении при помощи формулы (60.6) 
Проекции силы упругости, направленной по оси х, — на оси координат Х=-сх; Y= 0; Z = 0.
Элементарная работа силы упругости  .
.
Работа силы упругости на перемещении B1B2 =h:  (61.2)
(61.2)
Наибольшей деформации пружины B1B2 соответствует наибольшее значение силы упругости, а потому  (61.3)
(61.3)
Работа силы упругости отрицательна в том случае, когда деформация увеличивается, т. е. когда сила упругости направлена противоположно перемещению ее точки приложения, и положительна, когда деформация уменьшается.
Работа силы  на перемещении B2B1
на перемещении B2B1  (61.4)
(61.4)
На рис. 139, б показан график изменения проекции силы упругости  в зависимости от перемещения конца пружины X. Так как
в зависимости от перемещения конца пружины X. Так как  , то линия графика Ob' — прямая.
, то линия графика Ob' — прямая.
Работа силы упругости определяется площадью треугольника Obb': 
т. е. имеем тот же результат, который был получен аналитически.
Если начальная деформация пружины не равна нулю, а равна Хо, то работа силы упругости на дополнительной деформации (х1 — х0) равна:
 (61.5)
(61.5)
Формулы (61.2) —(61.5) имеют большое применение в технических расчетах. Эти формулы используют для вычисления работы сил упругости во всех случаях, когда имеется пропорциональность между силами и деформацией, т. е. когда справедлив закон Гука.
Работа силы тяготения.
Допустим, что на материальную точку М массой т, расположенную в пространстве на расстоянии от неподвижного притягивающего центра С массой т0, действует сила тяготения:
от неподвижного притягивающего центра С массой т0, действует сила тяготения: 
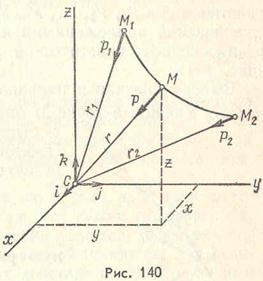 Определим работу этой силы на перемещении точки из положения M1 в положение М2 (рис. 140). Проведем через неподвижный центр С оси декартовых координат.
Определим работу этой силы на перемещении точки из положения M1 в положение М2 (рис. 140). Проведем через неподвижный центр С оси декартовых координат.
Элементарную работу силы вычислим при помощи формулы (60.6):
Здесь 
Аналогично  ,
,  .
.
Поэтому 
Так как развёрнутый дифференциал проекций радиус-вектора можно чисто математически свернуть в дифференциал радиус-вектора в квадрате:
 ,
,
то 
Работа силы тяготения Р при перемещении точки из М1 в М2  (61.6)
(61.6)
Как видно из (61.6), работа силы ньютонова притяжения не зависит от формы траектории точки.
|
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 1384; Нарушение авторских прав?; Мы поможем в написании вашей работы!