- Р Р‡.МессенРТвЂВВВВВВВВжер
- ВКонтакте
- РћРТвЂВВВВВВВВнокласснРСвЂВВВВВВВВРєРСвЂВВВВВВВВ
- РњРѕР№ Р В Р’В Р РЋРЎв„ўР В Р’В Р РЋРІР‚ВВВВВВВВРЎР‚
- LiveJournal
КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Структурный синтез и анализ механизмов
|
|
|
|
Основные виды механизмов
Исходя из кинематических, конструктивных и функциональных свойств, механизмы подразделяют на:
1. Рычажные (рис. 2 а, б) - предназначенные для преобразования вращательного движения входного звена в возвратно-поступательное движение выходного звена. Могут передавать большие усилия и мощности.
2. Кулачковые (рис.2 в, г) - предназначенные для преобразования вращательного или возвратно-поступательного движения входного звена в возвратно-поступательное или возвратно-вращательное движение выходного звена. Придавая профилям кулачка и толкателя соответствующие очертания всегда можно осуществить любой желательный закон движения толкателя.
3. Зубчатые (рис. 2 е) - образованные с помощью зубчатых колес. Служат для передачи вращения между неподвижными и подвижными осями. Зубчатые передачи с параллельными осями осуществляются при помощи цилиндрических зубчатых колес, с пересекающимися осями - при помощи конических зубчатых колес, а со скрещивающимися осями - при помощи червяка и червячного колеса.
4. Фрикционные (рис. 2 д) - движение от ведущего звена к ведомому передается за счет сил трения, возникающих в результате контакта этих звеньев.
Структурным синтезом механизма называется проектирование структурной схемы механизма, которая состоит из неподвижного и подвижных звеньев и кинематических пар. Он является начальной стадией составления схемы механизма, удовлетворяющего заданным условиям. Исходными данными обычно являются виды движения ведущего и рабочего звеньев механизма, взаимное расположение осей вращения и направления поступательного движения звеньев, их угловые и линейные перемещения, скорости и ускорения. Наиболее удобным методом нахождения структурной схемы является метод присоединения структурных групп Ассура к ведущему звену или основному механизму.

Рис. 2.
Под структурным анализом механизма понимается определение количества звеньев и кинематических пар, определение степени подвижности механизма, а также установление класса и порядка механизма.
Степень подвижности пространственного механизма определяется по формуле Сомова - Малышева:
W = 6n-(5P1+4P2 + 3P3 + 2P4 + P5) (1)
где Р1 , Р2, Р3 , Р4 , P5 - число одно-, двух-,трех-, четырех- и пятиподвижных кинематических пар; n - число подвижных звеньев.
Степень подвижности плоского механизма определяется по формуле Чебышева:
W=3n-2PH - PB (2)
где рн - число низших, а Рв- число высших кинематических пар.
В качестве примера рассмотрим четырехзвенный механизм рулевого управления автопилота (рис. 3.3): звенья 1 и 2 образуют цилиндрическую пару четвертого класса, имеющую две степени свободы; звенья 2-3 и 4-1 образуют вращательные пары пятого класса, имеющие одну степень свободы; звенья 3-4 образуют шаровую пару третьего класса, имеющую три степени свободы; число подвижных звеньев равно трем, тогда
W = 6 3-2 5-1 4-1 3 = 1
Степень подвижности данного механизма равна 1.
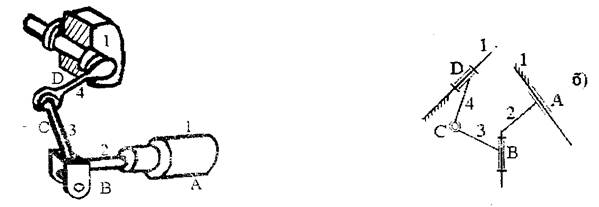
Рис. 3
Кинематическая цепь, число степеней свободы которой относительно элементов ее внешних кинематических пар равно нулю, называют структурной группой Ассура, по имени Л.В. Ассура, который впервые фундаментально исследовал и предложил структурную классификацию плоских стержневых механизмов. Пример образования плоского шестизвенного механизма дан на рис. 4.
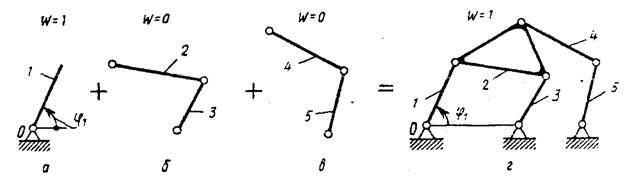
Рис. 4
Структурные группы подразделяют по классу и порядку. Класс группы определяется максимальным числом кинематических пар входящих в одно звено (рис. 5).
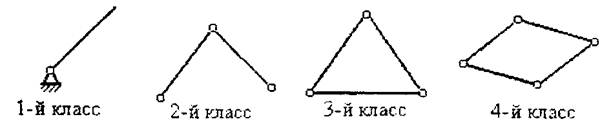
Рис. 5
Порядок группы определяется числом элементов, которыми группа присоединяется к основному механизму (рис. 6).
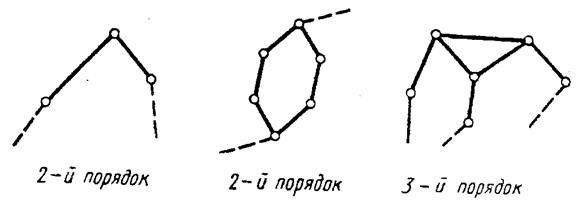
Рис. 6
Класс и порядок механизма зависят от того, какое звено является ведущим.
|
|
|
Дата добавления: 2014-01-07; Просмотров: 463; Нарушение авторских прав?; Мы поможем в написании вашей работы!