КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Типовые Нелинейные элементы САУ
|
|
|
|
Структура и уравнение нелинейной САУ в общем случае могут быть очень сложными. Степень сложности зависит от количества, вида и места включения нелинейных элементов. Однако большинство систем, встречающихся в промышленной автоматике, содержат один существенно нелинейный элемент. Обобщенная алгоритмическая схема таких систем показана на рис.14.1. На схеме выделены линейная и нелинейная части системы. Линейная часть включает в себя все линейные звенья системы и может иметь структуру любой сложности, в частности, содержать внутренние обратные связи.
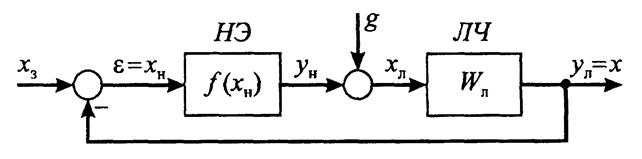
Рисунок 14.1. Обобщенная алгоритмическая структура нелинейной САУ
Нелинейная часть образована одним нелинейным элементом, выходная величина yн которого может быть выражена как функция входной величины xн и ее производной  :
:
 (14.1)
(14.1)
Структура, изображенная на рис. 14.1, соответствует случаю, когда нелинейный элемент выполняет функции управляющего устройства, как например, в системе стабилизации температуры (рис.13.2).
Иногда нелинейный элемент выполняет одновременно и функции блока сравнения. Так, например, в системе стабилизации уровня выходная величина управляющего устройства - напряжение ид - связана с входной величиной - уровнем h зависимостью, изображенной на рис.14.2. Среднее значение h 0 между положениями верхних и нижних контактов может рассматриваться как задающее воздействие.
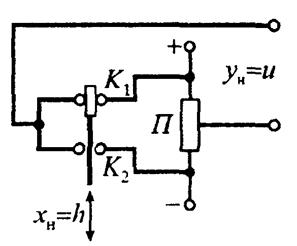
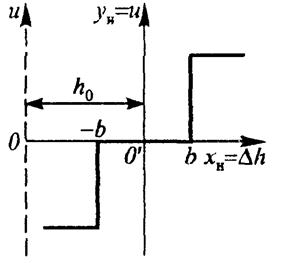
Рисунок 14.2. Нелинейное устройство и его характеристика
Простейшими нелинейными элементами являются статические (безынерционные) нелинейности. У них выходная величина yн зависит только от входной величины хн, причем эта зависимость строго однозначна.
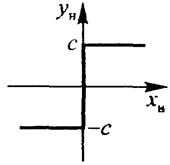
1. Идеальное реле (двухпозиционное реле).
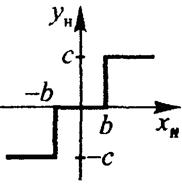
2. Трехпозиционное реле (реле с зоной нечувствительности)
|
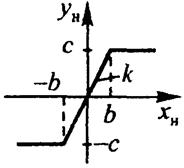
3. Усилитель с ограничением (усилитель с насыщением)
|
|
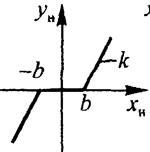
5. Усилитель с зоной нечувствительности и ограничением
|

У динамических нелинейностей выходная величина ун зависит как от входной величины хн, так и от ее производной . Характеристика динамической нелинейности всегда неоднозначна.
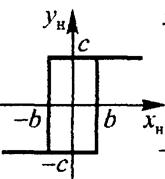
1. Реле с гистерезисом
|
|
3. Нелинейность типа «люфт»
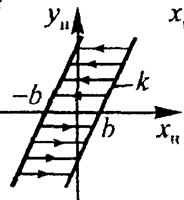
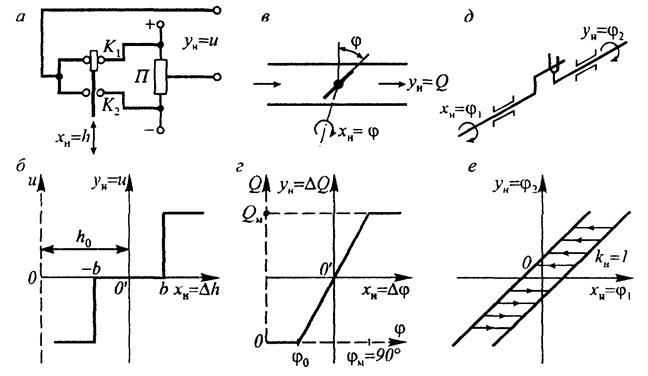
Рисунок 14.3 Нелинейные устройства и их характеристики
Рассмотренные статические и динамические нелинейности относятся к классу нелинейностей с кусочно-линейными характеристиками.
В управляющих устройствах САУ наряду с релейными элементами часто используются так называемые особые нелинейности, множительное и делительное звенья, элементы с переменной структурой, элементы логического типа.
Для улучшения качества систем применяются управляющие устройства с переменной структурой. В таких устройствах специальный блок изменения структуры (БИС) может включать в основной контур системы звенья с различными динамическими свойствами.
Например, в устройстве на рис.14.4,а БИС, в зависимости от значений сигнала ошибки и его производной, переключает закон регулирования с пропорционального на интегральный. Изменение структуры может происходить в зависимости и от других сигналов основного контура. Схема на рис. 14.4,б при больших сигналах ошибки работает как трехпозиционный регулятор, а при малых — как ПИ-регулятор. В ней изменение структуры происходит за счет зон нечувствительности.
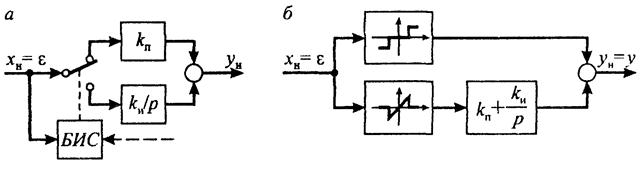
Рисунок 14.4. Нелинейные управляющие устройства с переменной структурой
Управляющим устройствам с переменной структурой эквивалентны и различные логические УУ. На рис. 14.5,а изображена структура логического УУ, изменение которой происходит по следующему алгоритму, называемому переключающей функцией:

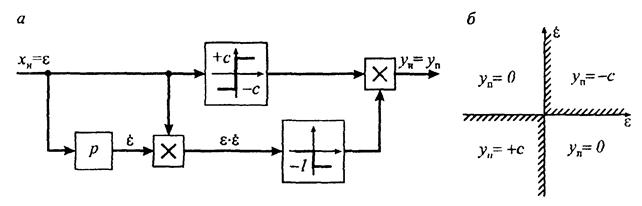
Рисунок 14.5. Алгоритмическая структура (а) и переключающая функция (б) логического управляющего устройства
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 7568; Нарушение авторских прав?; Мы поможем в написании вашей работы!