КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Контрольні питання. 1. Коли застосовують відхилення якості готового продукту як критерій ке-рування АПД ?
|
|
|
|
1. Коли застосовують відхилення якості готового продукту як критерій ке-рування АПД? Як в цьому випадку формують мету керування з допомогою те-хнологічної складової прибутку?
2. Коли застосовують продуктивність АПД як критерій керування цим апа-ратом? Як в цьому випадку формують мету керування з допомогою техноло-гічної складової прибутку?
3. Коли застосовують питомий вихід продукту як критерій керування АПД? Як в цьому випадку формують мету керування з допомогою технологічної скла-дової прибутку?
4. Наведіть постановку задачі динамічної оптимізації періодичних техноло-гічних процесів. Для чого у розв’язанні цієї задачі використовують математич-ні прогнозні моделі?
5. Наведіть постановку задачі динамічної оптимізації періодичних техно-логічних процесів. Для чого у разі розв’язання цієї задачі використовують фі-зичні прогнозні моделі?
6. Чому зміна тривалості циклу роботи (ТЦР) АПД впливає на його продук-тивність? Як ставиться та розв’язується задача вибору ТЦР з допомогою гра-фічного методу?
7. Чому зміна тривалості циклу роботи (ТЦР) АПД впливає на його продук-тивність? Як ставиться та розв’язується задача вибору ТЦР з допомогою аналі-тичного методу?
8. Чому зміна тривалості циклу роботи (ТЦР) АПД впливає на його продук-тивність? Як станоться та розв’язується задача ТЦР з допомогою розрахунково-графічного методу?
9. Як використовують одновимірний пошук з допомогою локалізації екстре-муму у разі застосування розрахунково-графічного методу вибору тривалості циклу роботи АПД?
10. Як використовують одновимірний пошук з допомогою золотого перерізу у разі застосування розрахунково-графічного метода вибору тривалості циклу роботи АПД?
Тема 6. РЕАЛІЗАЦІЯ РЕГУЛЯТОРІВ В МІКРОПРОЦЕСОРНИХ СИСТЕМ АВТОМАТИЗАЦІЇ (МСА)
Застосування прямого та непрямого керування при використанні ЕОМ. Позиційні та швидкісні регулятори. Реалізація керувальних функцій в регулюва-льних та логічних контролерах. Стандартні алгоритми регулювання, їх передатні функції та параметри настроювання. Використання автопідстро-ювання. Нелінійні логічні регулятори та види логічних функціональних при-строїв. Інтелектуальні регулятори нового покаління: експертні, асоциативні, нечіткі та нейромережні регулятори
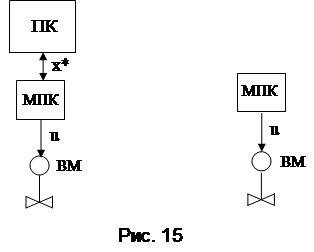
1. Загальні положення. Існують два режими реалізації керуючих функцій в МСА: супервізорне (непряме) і безпосередне (пряме) керування. При супер-візорному керуванні ЕОМ змінює завдання х*(t) або (та) вектор параметрів на-строювання локального регулятора k (t). При прямому керуванні ЕОМ безпосередньо керує виконавчим механізмом (ВМ), змінюючи сигнал u(t). Як відомо, в сучасних системах керування функції локальних регуляторів вико-нують МПК, а функції ЕОМ – персональні комп’ютери (ПК), тому структура цих двох варіантів реалізації керуючих дій має вигляд, наведений на рис.15.
При цьому ліва частина малюнка відповідає супервізорному керуванню, права частина – контролерному керуванню без вживання терміна безпосереднє (пряме) керування, тому що в обох випадках функції регулятора і станції керування виконує МПК.
2. Позиційні та швидкісні алгоритми регулювання. Головна особ-ливість цих алгоритмів полягає у квантуванні за часом вихідного керуючого си-гналу, тому рівняння такого (іноді його називають цифровим) ПІ-регулятора має такий вигляд:
uk = kp Dxk + uò.k, uò.k = uò.k-1+ (kpT0 /Tи ) Dxk, (27)
де uk – клерувальна дія на k-му кроці; Dxk – розузгодження на k-му кроці; T0 – період розрахунку uk, який може співпадати з періодом опитування датчиків або бути більшим цього періоду; uò.0=0. Рівняння (27), як і всі операції з інтегрування в ЕОМ, щоб не використовувати багато пам’яті, побудовано з допомогою рекурентного співвідношення, коли замість запам’ятовування всіх значень розузгодження запам’ятовується тільки підсумок попереднього кроку.
 |
Алгоритм (27) називають позиційним, оскільки при його використанні на виході ЕОМ формується повне значення u, а значить при відмові ЕОМ u =0 і в залежності від конструктивних особливостей ВМ він може займати крайнє положення, що є суттєвим недоліком цих алгоритмів. Цього недоліку не мають швидкісні алгоритми, які використовують в тих випадках, коли інтегрування відбувається не в обчислювальному пристрої, а в ЦАП або в ВМ (наприклад, крокові електродвигуни, електродвигуни ВМ постійної швидкості). У цьому випадку на виході ЕОМ формується не u, а D u:
Du = Duк – Duк-1 = kp(Dxк – Dxк-1)+(kpT0Dxк/Tи). (28)
Розглянуті алгоритми регулювання дозволяють доволі просто реалізувати комбіновані, автономні та інші багато контурні системи. В цьому випадку алго-ритми (27) і (28) зміняться таким чином:
uk = kp Dxk + uò.k + uk.k, (29)
Du = kp(Dxк – Dxк-1) + (kpT0 Dxк / Tи) + Duk.k (30)
де uk.k – сигнал компенсатора; Duk.k – приріст сигналу компенсатора. При реа-лізації (29) і (30) з допомогою МПК треба пам’ятати, що крім обмеження на u і Du, яке існує в стандартних алгоритмах регулювання, необхідно також обме-ження сигналів на u і Du, які формуються як сума сигналів регулятора та ком-пенсатора.
3. Реалізація керуючих функцій з допомогою контролера. Для цього ви-коритовуються стандартні алгоритми, які є бібліотеках мікропроцесорних контролерів (МПК). У всіх бібліотеках МПК містяться алгоритми регуляторів з аналоговим і імпульсним виходом. Перші призначені для управління пнев-матичними виконавчими механізмами (ВМ) і іншими регуляторами в каскад-них системах, другі застосовують для управління електродвигунними ВМ пос-тійної швидкості. Дамо коротку характеристику бібліотекам різних контролерів з точки зору наявності в них алгоритмів регулювання.
Реміконти великої і середньої канальності (РВСК). Ці контролери мають найбільш розвинуту бібліотеку алгоритмів регулювання: 7 алгоритмів аналого-вого регулювання і 9 алгоритмів імпульсного регулювання.
Базовий (стандартний) алгоритм РАС для аналогового ПІД-регулювання (код 01) здійснює перетворення сигналу у відповідності до передатною функцією:
W(p) = kп+ kп(1/Tи p) + {kпTд p/ [(Tд p/8) + 1] [(Tд p/4) + 1]}, (31)
де kп – коефіцієнт пропорціональності, який змінюється в інтервалі –127,8... +127,8 абсолютних одиниць з мінімальним кроком 0,1; Tи – час ізодрома який змінюється в інтервалі 0,01...136 хв при Tи = 0,27 с; Tд – час диференцювання, який змінюється в інтервалі 0,01...272 с при Tи = 0,51 с. Мінімальний крок зміни обох часових параметрів близько 3%.
Функціонально алгоритм РАС має два вхідних суматора, в яких підсумо-вується і масштабується п’ять вхідних змінних; інерційний фільтр для суматора перших трьох змінних; суматор, що формує розузгодження; вузол статичного розбалансування; зону нечутливості; інвертор; ПІД-ланку; пороговий елемент; нуль-орган, який контролює розузгодження і з’єднаний з дискретними вихо-дами алгоритму; вузол дистанційного керування (входи 6,7,8) з ланкою дина-мічного балансування.
Базовий (стандартний) алгоритм РІС для імпульсного ПІД-регулювання (код 11) здійснює перетворення сигналу у відповідності до передатної функ-цією (31), але з загальним коефіцієнтом Tм /Tм.о, де Tм і Tм.о – відповідно розра-хований повний час переміщення ВМ та його дійсне значення. Алгоритм міс-тить ПІД2-ланку, яка разом з ВМ реалізує ПІД-закон регулювання.
Автопідстроювання має ціла група алгоритмів РВСК, які використовую-ться на об’єктах з нестаціонарними параметрами. Це алгоритми РАП (04), ПАП (08), РИП (14), РПП (15), ПИП (18), ППП (19). У цих алгоритмів за винятком РПП і ППП входи 4 і 5 використовуються для змінювання коефіцієнтів пропорційності (вхід 4) та Tи і Tд (вхід 5) за формулою:
К = К0 [1 + (К4(5) Х4(5)/13)], (32)
де К0 – початкове значення kп,Tи,Tд; Х4(5) - сигнали автопідстроювання; К4(5) – масштабні коефіцієнти, що визначають ступінь впливу сигналів Х4(5) на параметри kп,Tи,Tд. Алгоритми РПП та ППП мають повне автопідстроювання, використовуючи для цього крім входів 4 і 5 ще вхід 2 підстроювання сталої ча-су ВМ Tм, а вхід 3 – для підстроювання зони нечутливості D за формулою (32).
Ломіконти. Їх бібліотека м ає 4 стандартних алгоритмидля регулювання: ПІД-А (аналоговий), ПІД-І (імпульсний), ПІ-А, ПІ-І, які фактично реалізують частину функцій алгоритмів РАС, РІС, ПАС і ПСІ РВСК, починаючи з су-матора перед елементом, що формує зону нечутливості, і закінчуючи обмежу-вачем на виході алгоритму. Передатні функції ПІД-А і ПІД-І алгоритмів пов-торюють передатні функції РАС і РІС алгоритмів, але без [(Tдp/4)+1] у знаме-ннику Д-складової. Авто підстроювання параметрів здійснюється за формулою:
К = Ко[1 + (Кап Хап/512)],
де Кап – коефіцієнт автопідстроювання; Хап – вхід автопідстроювання. У вказаних алгоритмах стала часу може змінюватися в діапазоні 1 с... 72 год 14 хв 56 с, коефіцієнт пропорціональності – 0... 100, масштабний коефіцієнт – 0... 1,99.
Реміконти малої канальності (РМК). Їх бібліотека м ає 2 стандартних алгоритмудля регулювання: РАН (аналоговий) і РІМ (імпульсний). Їх відмі-нність від алгоритмів РАС і РІС полягає у такому:
· підсумовуються тільки дві вхідні змінні, одна з яких масштабується і фі-льтрується;
· алгоритм має режим настроювання, в якому автоматично визначаються оптимальні параметри настроювання.
Передатна функція алгоритму РАН має такий вигляд:
W(p) = kп+ kп(1/Tи p) + {kпTд p/ [(Tд p/8) + 1] 2},
де kп змінюється у тому ж діапазоні, що і у РАС-алгоритму; Tи і Tд можуть змінюватися, як і решта сталих часу у діапазоні 0... 819 с, хв, год (в залежності від настроювання); Tд = kдTи (при kдTи > 819, значення Tд дорівнює не скін-ченості); масштабний коефіцієнт змінюється в діапазоні –15,99... +15,99. Ана-логічно формується і РІМ-алгоритм, передатна функція якого відрізняється від передатної функції РАН-алгоритму множником Tм /Tм.о.
Підсумовуючи розглянуте, зазначимо що найбільшу ступінь інтеграції фу-нкцій автоматичного регулювання мають стандартні алгоритми РВСК. При використанні стандартних алгоритмів РМК вони повинні бути доповнені алго-ритмом ручного управління, алгоритмом оперативного регулювання і в необ-хідних випадках (при кількості входів більш одного) – алгоритмом підсумо-вування. При використанні стандартних алгоритмів ломіконта до вказаних до-даткових алгоритмів необхідно додати також алгоритм фільтрації.
4. Нелінійні логічні регулятори (НЛР). НЛР відносяться до нестандарт-них алгоритмів регулювання, в яких регулювальна дія на об’єкт є нелінійною функцією розузгодження, причому можуть бути як статичні, так і динамічні нелінійності. В НЛР нелінійний закон регулювання реалізується з допомогою логічних функцій. Застосування НЛР є ефективним алгоритмічним способом покращення якості функціонування АСР на об’єктах з несприятливими дина-мічними властивостями. Цей спосіб має суттєві переваги перед інформаційними способами, що домінують в апаратних системах автоматизації і пов’язані з застосуванням багато контурних АСР. По-перше, алгоритмічний спосіб більш економічний у зв’язку з тим, що не потребує додаткових інформаційних кана-лів. По-друге, він доволі просто, реалізується програмним шляхом в МСА.
Загальний вигляд структурної схеми АСР з НЛР наведений на рис.16.
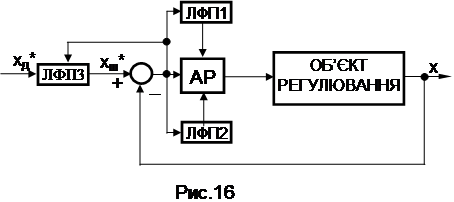 |
В такій системі використовуються один або кілька логіко-функціональних пристроїв (ЛФП), які в залежності від розузгодження Dx або його похідної вми-кають чи вимикають складові закону регулювання (ЛФП1), змінюють пара-метри настроювання регулятора (ЛФП2) або формують штучне завдання xш* на деяких ділянках перехідного процесу (ЛФП3).
Прикладом найпростішого НЛР з ЛФП1 є ПІНД-регулятор, в якому в зале-жноті від значення розузгодження Dx вмикається або вимикається І-складова:
u = kp{ Dx + (e ò Dx dt / Tи ) + [Tд d(Dx)/dt]}, (33)
де e – логічна функція розузгодження: e = 1, коли |Dx| < d, та e = 0, коли |Dx| >> d, причому значення d залежить від припустимої статичної похибки системи.
Прикладом НЛР з ЛФП2 є ПІД-регулятор з подвійною П-складовою – П2ІД:
u=kp{ Dx |Dx| + (òDxdt / Tи ) + [Tд d(Dx)/dt]}. (34)
Для зменшення впливу Д-складової на перехідний процес вона може розрахо-вуватися не за значенням розузгодження Dx, а безпосередньо за значенням регульованої величини x.
І накінець, прикладом НЛР з ЛФП3 є регулятор зі зміною завдання за та-ким алгоритмом:
xш* = xд*, коли d(Dx)/dt > 0; xш* = x, коли d(Dx)/dt = 0;
xш* = xme-lt, коли d(Dx)/dt < 0; (35)
де xш*,xд*– відповідно штучне і дійсне значення завдання; xm – значення змі-нної в момент відсічки дійсного завдання, тобто при d(Dx)/dt=0; l – параметр затухання експоненти. При використанні НЛР необхідно вирішити дві задачі: розробити програмно-конфігураційну схему реалізації такого регулятора та ви-значити його оптимальні параметри настроювання.
5. Інтелектуальні регулятори нового покоління. Розглянуті вище НЛР іноді відносять до інтелектуальних регуляторів 1-го покоління, враховуючи що вони змі-нюють режими роботи в залежності від ситуації на об’єкті. Нове, 2-го покоління інтелектуальних регуляторів пов’язано зі створенням регуляторів з розвинутою пам’яттю, наявністю стадії навчання в їх життєвому циклі та мож-ливістю застосування їх у разі невизначеності характеристик об’єкта регулю-вання. До них відносяться експертні, асоціативні, нечіткі та нейромережні регулятори.
Експертний регулятор (ЕР) призначений для активної самодіагностики об’єкта регулювання (ОР) з допомогою аналізу змін параметрів ОР та їх ком-пенсації перенастроюванням ЕР, структура якого складається з таких компо-нентів:
база знань містить теоретичні емпіричні знання з предметної області теорії автоматичного керування і ОР, включаючи знаннями, отримані під час навча-ння з допомогою аналізу динамічних властивостей системи, а також знання про діапазони зміни керуючих дій і збурень, порядок математичної моделі. При цьому сукупність сформованих теоретичних і емпіричних знань представляють вигляді продукційних правил, що регламентують автономне функціонування ЕР на кожному етапі його роботи;
база алгоритмів (іноді може входити в склад бази знань) має закони регу-лювання, алгоритми параметричної ідентифікації і синтезу АСР;
база даних зберігає поточні значення змінних ОР і характеристики про-цесів регулювання;
механізм логічного виводу формує експертні висновки, на базі яких відбу-вається перенастроювання ЕР.
Регулятор з асоціативною пам’яттю на базі інформації про стан об’єк-та регулювання миттєво вибирає із асоціативної пам’яті значення керуючої дії або параметрів настроювання регулятора. Навчання цього регулятора пов’язане з накопичення елементів асоціативної пам’яті, в якій певним значенням змінних x, z, Dх та швидкостям їх зміни відповідають певні значення u та параметрів настроювання регулятора. Найчастіше така система є системою з дискретно змінюваними параметрами.
Нечіткий регулятор побудований з використанням нечіткої (розмитої) логіки або «Fuzzy-Logic» (фуці-логіки), причому знання про взаємодію з об’єк-том регулювання представляються у вигляді правил ЯКЩО (ситуація на об’єк-ті) – ТО (реакція) або ЯКЩО – І (додаткова інформація про об’єкт) – ТО. Нап-риклад, ЯКЩО (тиск пари великий) І (температура збільшується), ТО (вентіль подачі палива закрити). Структурно регулятор складається з таких компонентів:
блок фуціфікації переводить значення змінних у лінгвістичні величини. Для цього їх числові значення характеризують лінгвістичними величинами (ЛВ) «мало», «середньо», «багато». Кожна ЛВ описується фуці-правилами (ФП), причому вони можуть накладатися одне на інше і одній змінній декілька ФП можуть давати різні значення;
база правил зберігає фуці-правила для кожної ЛВ;
блок формування логічного рішення використовує правила типу ЯКЩО-ТО і ЯКЩО-І-ТО, які в даному випадку описують поведінку регулятора. Цим пра-вилом досягається результат, при якому для будь-якої ЛВ керуючої дії як мі-німум одне правило буває дійсним;
блок дефуціфікації генерує керуючу дію, яку на виході регулятора отри-мують як нечітку множину у формі ФП. Найбільш часто в цьому випадку ви-користовується метод центру тяжіння, при якому керуюча дія обчислюється як значення абсциси центру тяжіння площини, що обмежена ФП та віссю абсциси.
Нейромережний регулятор (НМР) найчастіше створюється на базі бага-тошарової нейронної мережі (НМ) прямого розповсюдження, структура якої є дискетною решіткою з заданою кількістю прошарків та нейронів у прошарку, тому її функціонування описується рівнянням
Nk-1
Аkn = f kn (S Wkin А(k-1)i), n = 1,..., Nk ,
n=1
де Nk – кількість нейронів в k-му прошарку; Аkn – вихід n-го нейрона k-му про-шарку; Wkin – «вага» зв’язку від виходу n-го нейрона в (k–1)-му прошарку до входу n-го нейрона в k-му прошарку; fkn(×) – функція перетворення n-го ней-рона в k-му прошарку, k=1,...,M (M – кількість прошарків в мережі).
Проектування НМР пов’язане з визначенням його розмірності (кількість прошарків і кількість нейронів в прошарку), а настроювання – з визначенням коефіцієнтів зв’язку. Коефіцієнти НМ можуть визначатися методом навчання або самоорганізації. Для настроювання коефіцієнтів методом навчання викори-стовують підключення промислового регулятора (ПР) та спеціальну вбудовану процедуру оптимізації. В самоорганізаційних НМ коефіцієнти зв’язку формую-ться в результаті нелінійних процесів конкурентної взаємодії між нейронами і механізмів саморегуляції.
Якщо динамічні процеси в нейронній мережі мало інерційні, то процеси оптимального настроювання параметрів мережі із-за інтегрального характеру процедур мають повільну збіжність. Це треба враховувати при застосуванні нейронних мереж в адаптивних систем керування, по-перше, під час узгоджу-ння швидкості пере-настроювання параметрів мережі, по-друге, при початково-му запусканні адаптивної системи. В останньому випадку із-за апріорної невизначеності в системі можуть виникати «пошукові блукання» і, як наслідок, великі перерегулювання. Для подолання цього недоліку використовують схему, коли попереднє НМР «навчають» з допомогою промислового регулятора (рис.17).
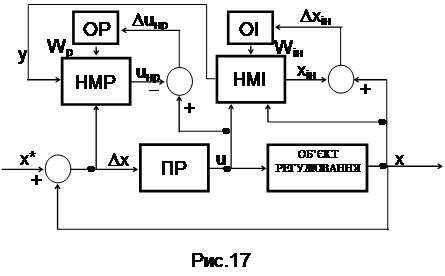 |
НМР формує керуючу дію u з допомогою послідовності попередніх зна-чень сигналу похибки керування Dх і даних прогнозу y нейромережного іденти-фікатора НМІ. Останній з допомогою сигналів u та x формує сигнал хін, який порівнюється з виходом об’єкту х і визначає таким чином похибку іденти-фікації Dхін. Оптимізатори регулятора ОР та ідентифікатора ОІ, використовую-чи похибки регулювання Dх і ідентифікації Dхін, визначають нові значення ве-кторних коефіцієнтів зв’язку Wр і Wін, формуючи таким чином структуру НМР та модель об’єкта керування. НМР підіключено паралельно промисловому ре-гулятору ПР, який керує об’єктом. Cигнал розузгодження Duнр використову-ється оптимізатором ОР для настроювання коефіцієнтов зв’язку НМР Wp. Од-ночасно відбувається настроювання параметрів моделі об’єкта в НМІ Wін. Після закінчення попереднього навчання на вхід об’єкта замість ПР підмикається НМР.
Література для самостійної роботи: [5] С.24-26; [14 – 16].
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 424; Нарушение авторских прав?; Мы поможем в написании вашей работы!