КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Оптимізація періодичних технологічних процесів
|
|
|
|
Контрольні питання
1. Які виробництва відносять до неперервного, дискретного та неперервно-дискретного типу? Які технологічні процеси відносять до неперервних і які до періодичних?
2. Які особливості реалізації неперервних та періодичних процесів у апа-ратах неперервної, напівнеперервної та періодичної дії? Розкрийте зміст кое-фіцієнта періодичності.
3. За якими ознаками і як класифікують АПД як об’єкти управління? Роз-крийте зміст внутрішньо циклових та циклових жорстких та гнучких часових обмежень
4. Яка послідовність побудови системи управління АПД?
5. Що описує логічна частина математичної моделі АПД і які мови застосо-вують для її побудови? В чому полягає особливість використання логічних схем алгоритмів?
6. Що описує логічна частина математичної моделі АПД і які мови застосо-вують для її побудови? В чому полягає особливість використання граф-схем ал-горитмів та мови циклічних процесів?
7. Що описує динамічна частина математичної моделі АПД? У якому виг-ляді вона подається і як поєднується з логічною частиною?
8. Опишіть структуру і зробіть класифікацію систем керування АПД. Які прин-ципи побудови логічної підсистеми?
9. Які принципи побудови динамічної підсистеми системи управління АПД? Для чого в цій підсистемі використовують програматор і які види програм при цьому можна застосувати? Наведіть їх порівняльну оцінку.
10. Які існують способи розроблення програм для програматора динамічної підсистеми системи керування АПД? Який діапазон застосування цих способів?
Складові постановки задачі оптимізації. Класифікація та типізація задач оптимізації. Використання прогнозувальних моделей та діапазон їх застосува-ння. Постановка задачі визначення тривалості циклу роботи АПД. Графічний, аналітичний та розрахунково-графічний методи. Застосування алгоритмів од-новимірного по-шуку: локалізації екстремуму, золотого перерізу, чисел Фібо-начі.
У загальному вигляді задача динамічної оптимізації детермінованого процесу зводиться до знаходження такої функції u*(t) або х*(t) при tк ³ t ³ t0, яка забезпечує оптимум функціоналу
tк
I = ò j ( x,u,z,а )dt à opt Þ u* (t) або х* (t) (22)
t0 u(t)ÎW
при таких обмеженнях:
 |
f (х’, x,u,z,b )=0, (23)
W: 0³ h ( x,u,z ), (24)
g[ x (tк), x (t0)]=0, (25)
де (23) – обмеження типу зв’язків; (24) – обмеження типу нерівностей; (25) – краєві умови.
АПД, як об’єкти оптимізації відносяться до ОНІ, тому для їх оптимізації використовують аналітичні адаптивні алгоритми з прогнозуючою моделлю та зворотнім зв’язком (ЗЗ). Неповнота інформації про АПД може мати дві при-чини: перша – це відсутність інформації про всі складові вектора збурень z та вектора параметрів моделі b; друга – це відсутність інформації про всі складові вектор-функції обмежень типу нерівностей h.
У першому випадку використовують системи з прогнозуючою математи-чною моделлю (ПММ), а у другому – з прогнозуючою фізичною моделлю (ПФМ). В останньому випадку невідомими найчастіше є обмеження, пов’язані, насамперед, з критичними значеннями рушійної сили, перевищення яких приводить до критичних ситуацій в апараті. Так, наприклад, при кристалізації цукру перевищення пересиченням між кристального розчину в апараті своїх критичних значень призводить до інтенсифікації процесів вторинного криста-лоутворення, що суттєво змінює гранулометричний склад цукру і робить його непридатним для подальшої обробки. При вирощуванні дріжджів перевищення концентрацією вуглеводів своїх критичних значень призводить до фактичного припинення процесів вирощування дріжджів та інтенсифікації процесів броді-ння. Коли неповнота інформації про об’єкт пов’язана з обома причинами ви-користовують фізико-математичну моделі(ПФММ). Всі перераховані моделі можуть працювати з постійними параметрами (С-моделі), або з корекцією цих параметрів (А-моделі).
Особливістю ПММ є те що вона працює в прискореному масштабі часу і системи з такими моделями називають двошкальними, тому що модель працює в прискореному масштабі часу, а всі інші компоненти в реальному.
ПФМ – це пристрій, розташований усередині (вбудована ПФМ) або поза апаратом (винесена ПФМ), у який безперервно надходить невелика частина продукту, який відбирають з реакційної зони апарата. При цьому в ПФМ за ра-хунок інтенсифікації процесу створюється режим більш інтенсивної зміни ру-шійної сили процесу, за рахунок чого критична ситуація досягається в ПФМ раніше ніж в апараті і оптимальне керування зводиться до відслідковування апаратом критичної межі рушійної сили, яка моделюється в ПФМ, але без її досягнення в апараті.
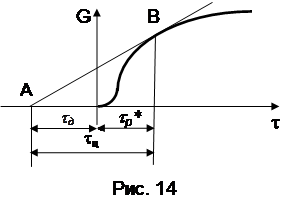
Цикл АПД складається з двох часових інтервалів: робочої стадії tр і допо-міжних операцій tд (завантаження, вивантаження, чистка). У деяких випадках тривалість tр настільки велика, що необхідно знайти час припинення процесу, оскільки на заключному періоді робочої стадії швидкість накопичення проду-кту значно зменшується і стає недоцільним продовжувати процес. Краще його припинити і повторно увімкнути апарат у роботу. За таких умов ставиться за-дача вибору оптимальної тривалості циклу АПД, яка забезпечує максимізацію продуктивності апарата:
g=G/tц à max Þ tц* (26)
tц
де g – продуктивність апарата, од.маси/од.часу; G – кількість продукту, отри-мана в АПД, од.маси: tц, tц* – тривалість циклу та її оптимальне значення. Критерієм управління в цій задачі є G/tц, а управління здійснюється зміною tц. Розв’язання цієї задачі можливе при відсутності обмежень на tц, які накладає система більш високого рівня управління, або технологічний регламент. Мето-ди, які використовуються в цьому випадку, поділяють на графічний, аналіти-чний і розрахунково-графічний.
При графічному методі будується кінетична крива накопичення продукту в апараті за часом (рис.14). На від’ємній напівосі абсцис відкладають час допоміжних операцій (точка А). З точки А проводять дотичну до кінетичної кривої. Проекція точки дотику точка В) на вісь абсцис визначає оптимальний tц*.
 |
Аналітичний метод базується на використанні методу класичного аналізу, розахунково-графічний – на методах одновимірного пошуку.
Література для самостійної роботи: [11] С.80-83, 87-88, 103-104; [1] С.40,41; [5] С.281-285.
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 582; Нарушение авторских прав?; Мы поможем в написании вашей работы!