КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Тема 3. Автоматизація періодичних технологічних процесів
|
|
|
|
Неперервні та дискретні виробництва; неперервні та періодичні техноло-гічні процеси; апарати неперервної (АНД), напівнеперервної (АННД) та періо-дичної (АПД) дії. Коефіцієнт періодичності. Класифікація АПД як об’єктів керування. Використання логіко-динамічних моделей. Особливості побудови ло-гічної і динамічної частин моделей та їх сполучення. Загальна послідовність операцій при розробці автоматизованих систем керування АПД. Характери-стика показників, що використовують як критерії керування. Вибір критерія керування. Логічна та динамічна підсистеми їх функції та склад. Програма-тор та стабілізувальні регулятори. Види та методи створення програм при розробці динамічної підсистеми.
Харчові виробництва відносяться до виробництв неперервного та непе-рервно-дискретного типу. Для перших – при безперервному уведені сировини характерним є випуск однорідної продукції, що у певних межах являє собою безперервний об’єм. У других готова продукція неоднорідна, вона поділена на окремі порції або вироби.
Технологічні процеси у тих чи інших можуть бути класифіковані за цілим рядом ознак, включаючи організаційно-технічні і фізико-хімічні. Найбільш спі-льною та вельми важливою для управління процесом є їх класифікація за сту-пенем сполучення двох складових будь-якого технологічного процесу: меха-нічного перемішування (транспортування) продукту чи виробу і його пере-робки. У неперервних процесах ці дві складові невід’ємні одна від одної, у пе-ріодичних – вони чергуються.
В залежності характеру технологічних процесів апарати також поділяють на апарати неперервної (АНД), напівнеперервної (АННД) та періодичної (АПД) дії. В АПД всі стадії технологічного процесу здійснюються в одному місці, але в різний час, в АНД – одночасно, але в різних місцях. Крім того, для АНД характерним є робота в режимі, в якому одночасно з завантаженням (жив-ленням) апарату проходить і його вивантаження. В АПД ці операції рознесені у часі, причому деякий час свого циклу АПД взагалі може працювати без заван-таження та вивантаження. Для АННД характерним є наявність обох режимів в виробничому циклі апарата.
У циклі будь-якого АННД чи АПД можна виділити час періодичної tпер та неперервної tнеп роботи, тоді циклічність (періодичність) роботи технологі-чної апаратури можна характеризувати коефіцієнтом періодичності: h = =tпер/tзад, де tзад – часовий інтервал, на якому вирішується задача управління. Якщо tзад охоплює весь цикл апарата, то tзад = tпер + tнеп. Для АНД – h = 0, для АПД – h = 1, для АННД – 0 < h < 1.
В АПД порівняно з АНД перехідні процеси, пов’язані з переходом з по-чаткового стану, що характеризується вектором х0, у кінцевий стан, якому від-повідає вектор хК, є корисними і часто реалізуються відповідно до технологі-чного регламенту (ТР). У АНД ж перехідні процеси є реакцію системи регу-лювання цих апаратів на збурення і характеризують фактично відхилення від ТР. Крім того, параметри диференційних рівнянь, що описують ці перехідні процеси, у разі АНД можуть вважатися постійними, враховуючи невеликі відхилення від номінальних (заданих) значень змінних стану. У той же час суттєві зміни середовища у АПД при переході від х0 до хК не дають змоги приймати такі припущення і потребують враховувати зміни параметрів ди-ференційних рівнянь, що описують перехідні процеси в АПД. Якщо прийняти припущення, хК = х0 + х(t), то х(t) можна розглядати як вектор-функцію пе-реходу, що задає траєкторію руху об’єкта від х0 до хК.
На вирішення задач управління АПД суттєво впливають, насамперед, режимні та організаційні ознаки функціонування технологічної апаратури. Вказані ознаки дають змогу класифікувати АПД і періодичні режими АННД як об’єкти управління:
1) кількість виконуваних функцій: однофункціональні, багатофункціона-льні;
2) кількість стадій: двостадійні, трьохстадійні, чотирьохстадійні, багато стадійні;
3) наявність живлення: без підживлення або с підживлення (неперервне, періодичне);
4) характер взаємодії з основним технологічним потоком: основні, допо-міжні;
5) часові обмеження: внутрішньо циклові, міжциклові (жорсткі, гнучкі);
6) функція переходу: регламентована, довільна;
7) тривалість циклу: стаціонарна, нестацйіонарна;
8) об’єм робочого середовища: постійний, змінний.
При реалізації технологічних процесів в АПД перехід від однієї стадії циклу до іншої може змінювати цільове призначення процесу і закономірності, яким він підпорядкований, і як наслідок – структуру математичної моделі, що описує технологічний процес. Це дає можливість класифікувати АПД як об’єкт змінної структури, для математичного опису якого необхідно використовувати математичну модель логіко-динамічної структури.
Логічна частина моделі описує послідовність перемикань (виконавчих органів АПД), необхідних для нормального функціонування об’єкта на різних стадіях його циклу. Динамічна частина моделі описує реакцію інерційного об’єкта на керуючі сигнали (команди), що надходять на початку операції чи стадії, та збурення.
Для побудови логічної частини використовують різні мови, які базуються на бульовій алгебрі і застосовуються для опису сигналів, які керують вико-навчими органами АПД. До таких мов відносяться логічні схеми алгоритмів (ЛСА), граф-схеми алгоритмів (ГСА), мова циклічних процесів (МЦП), мережі Петрі, універсальна мова моделювання UML. Вказані мови в своєму складі мА-ють, як правило, два основних елемента: позиційний оператор (ПО), що вказує на положення виконавчого органу, та логічні умови (ЛУ), при виконання яких виконавчий орган змінює своє положення. ПО і ЛУ можуть приймати одне з двох значень: 0 або 1.
Для побудови динамічної частини ЛДМ використовують диференційні рів-няння з нестаціонарними параметрами. Існують різні форми сполучення логік-ної і динамічної складових при створенні логіко-динамічної моделі (ЛДМ). Зо-крема використовують трансформацію логічної частини моделі за рахунок уве-дення в неї динамічного оператора об’єкта (ДОО).
Як критерій управління АПД може бути обраний один з таких показників:
1) величина, що характеризує відхилення якості готового продукту I від його заданого значення I*, тобто
D I = I* – I (18)
– використовується при зв’язаному вирішенні задач управління окремим АПД і ТК АПД;
2) кількість отриманого за одиницю часу готового продукту
c = bц / tц, (19)
коли нема жорстких обмежень на час циклу, і кількість продукту отриманого за цикл bц, коли такі обмеження є. При цьому обидва показники використовують у випадку, коли задача керування окремим АПД вирішується автономно і незв’язана з задачею керування ТК АПД, а в структурі витрат не переважають витрати на сировину;
3) питома витрата сировини або енергії
gц= gц / bц, (20)
чи питомий вихід готового продукту
bц = 1 / gц = bц / gц, (21)
де gц – кількість сировини чи енергії витраченої за цикл. Ці критерії викори-стовуються, коли задача управління окремим АПД також вирішується автоно-мно і вона незв’язана з задачею керування ТК АПД, а в структурі витрат пере-важають витрати на сировину.
Мета управління з допомогою одного з перелічених показників формується так, щоб максимізувати технологічну складову прибутку. Для цього показники (19) і (21) – максимізуються, а показники (18), (20) – мінімізуються.
АСК АПД, як і його математична модель, у загальному випадку має логіко-ди-намічну структуру, тобто складається з логічної підсистеми, що виконує переми-кальні дії, і динамічної підсистеми, яка забезпечує реалізацію функції переходу під час робочої стадії (рис.13). Перемикальні дії можуть бути між цикловими (МЦПД) та внутрішньо цикловими (ВЦПД). Перші формують інтегральні дії для всього циклу у цілому: наприклад, початок та кінець циклу. Другі забезпечують перехід від однієї стадії циклу до іншої при досягненні необхідних логічних умов.
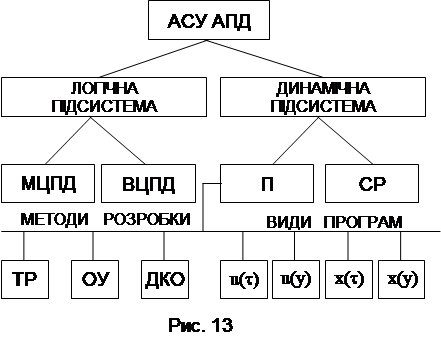 |
Динамічні дії пов’язані з неперервною зміною однієї чи кількох складових узагальненого потоку, що включає потоки маси, її компонентів, теплоти та кі-лькості рухів. Основним елементом динамічної підсистеми є програматор (П), що реалізує програму і відповідно функцію переходу. При необхідності стабі-лізації деяких змінних використовують також стабілізуючі регулятори (СР). Для розробки програми використовують такі методи:
1) з допомогою технологічного регламента (ТР), тобто якщо програма за-дана ТР, то її переносять на програмні чи апаратні носії без змін;
2) з допомогою вирішення варіаційної задачі оптимального керування (ОК), якщо функція переходу не задана ТР, а математична модель дозволяє вирішити задачу ОК;
3) з допомогою досвіду кращих операторів (ДКО), якщо функція переходу не задана ТР і відсутня необхідна ММ.
Програма може бути представлена одним з 4-х способів:
1) керуючі дії в залежності від часу u(t) - найменш точна програма, яку реалізує система керування незамкнена по відношенню до вихідних змінних АПД;
2) керуючі дії в залежності від проміжної змінної u(у) – для більш точного визначення розвитку процесу час замінено на проміжну зміну (якщо в АПД змінються рівень, то він використовується як y);
3) вихідна змінна в залежності від часу x(t) - за рахунок використання вихідної змінної утворюється замкнена система;
4) вихідна змінна в залежності від проміжної змінної x(у) - найбільш точна реалізація програми з використанням замкненої системи і проміжної змінної.
Література для самостійної роботи: [11] С.5-24, 80 – 87; [1] С.34-36.
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 833; Нарушение авторских прав?; Мы поможем в написании вашей работы!