КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Тема 1. Функции, выполняемые автоматизированными гидроприводами на борту летательных аппаратов
|
|
|
|
Учебное пособие
УПРАВЛЕНИЕ ПЕРСОНАЛОМ
ШМАКОВ Александр Григорьевич
Дополнительная
Основная
1 Аширов Д.А. Управление персоналом: учеб. пособие. М.: Проспект, 2007. 432с.
2 Бухалков М.И. Управление персоналом: учебник для вузов. 2-е изд., испр. и доп. М.: ИНФРА-М, 2009. 399с.
3 Бухалков М. И. Управление персоналом: развитие трудового потенциала: учеб. пособие для вузов. М.: ИНФРА-М,2009. 191с.
4 Управление персоналом организации: учебник / под ред. А.Я. Кибанова. 3-е изд., доп. и перераб. М.: ИНФРА-М, 2008. 638с.
1 Бухалков М.И. Управление персоналом на предприятии: учебник. М.: Экзамен, 2005. 320с.
2 Веснин В.Р. Управление персоналом. Теория и практика: учебник. М.: Проспект, 2009. 688с.
3 Герчиков В.И. Управление персоналом: учеб. пособие. М.: ИНФРА-М,2008.281с.
1 Журавлев П.В. Менеджмент персонала. М.: «Экзамен», 2004.
2 Карташева Л.В. Организационное поведение: учебник. 2-е изд., перераб. и доп. М.: ИНФРА-М, 2008. 784с.
3 Кафидов В.В. Управление персоналом: учеб. пособие. СПб.: Питер, - 2009. 202с.
7 Кибанов А.Я. Основы управления персоналом: учебник. 3-е изд., перераб и доп. М.: ИНФРА-М, 2008. 446с.
8 Кибанов А.Я. Управление персоналом организации: учебник. 2-е изд. перераб. и доп. М.: ИНФРА-М,2006. 637с.
9 Кибанов А.Я. Управление персоналом организации: стратегия, маркетинг, интернационализация: учеб. пособие для вузов. М.: ИНФРА-М, 2007. 300с.
10 Корчагина А.С.: Управление персоналом: учеб. пособие. М.: Экзамен, 2006.
11 Лукашевич В.В. Управление персоналом: учеб. пособие. М.: ЮНИТИ-ДАНА, 2004. 320с.
12 Лукичева Л.И.: Управление персоналом: конспект лекций. 3-е изд., перераб. и доп. М.: «Омега», 2007. 237с.
13 Мильнер Б.З. Теория организации: учебник. 6-е изд., перераб и доп. М.: ИНФРА-М, 2008. 864с.
14 Мхайлина Г.И. Управление персоналом: учеб. пособие. 2-е изд. перераб. и доп. Дашков и К, 2007.
15 Спивак В.А. Управление персоналом: учеб. пособие. М.: Эксмо, 2009. 336с.
16 Система муниципального управления: учебник для вузов. 4-е изд. / под ред. В.Б. Зотова. СПб.: Питер, 2008. 512с.
17 Управление персоналом организации. Практикум: учеб. пособие для вузов по специальностям «Менеджмент организации», «Управление персоналом» / под ред. А.Я.Кибанова. 2-е изд., перераб. и доп. М.:ИНФРА-М, 2007. 364с.
18 Управление организацией: учебник / под ред. А.Г. Поршнева и др. 3-е изд. перераб. и доп. М.: ИНФРА – М, 2005. 716с.
Учебное издание
Редактор
Подписано в печать.
Формат Бумага офсетная.
Усл. Печ. л.. Уч=изд. л.
Тираж экз. Заказ
Цена договорная
ГОУ ВПО «Челябинский государственный университет»
454001 Челябинск, ул. Братьев Кашириных, 129
Издательство Челябинского государственного университета
454021 Челябинск, ул. Молодогвардейцев,57 б
Понятие об органах управления полётом самолётов.
Для управления полётом самолёта, например, для изменения направления полёта, его высоты и скорости необходимо, прежде всего, изменять положение самолёта в пространстве. Для этого необходимо создать моменты сил, которые разворачивают самолёт, как твёрдое тело, вокруг трёх осей: продольной оси (ось Х), которая направлена по касательной к траектории в сторону движения самолета, вертикальной оси (ось Y), расположенной в плоскости траектории перпендикулярно продольной оси, и поперечной оси (ось Z), перпендикулярной первым двум осям. Нарис.1.1 показаны эти оси и моменты сил [1.1].
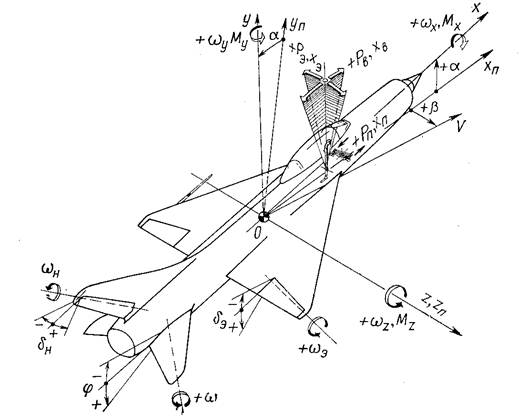
Рис.1.1
Направление осей и моментов от сил, которые изменяют положение
самолёта в пространстве
Необходимо отметить, что направление вектора скорости не совпадает с продольной осью и строительной горизонталью самолета. Угол между продольной осью самолета и проекцией вектора скорости на продольную плоскость YOX называется углом атаки  , а угол между продольной осью самолета и проекцией вектора скорости на поперечную плоскость ZOX - углом скольжения
, а угол между продольной осью самолета и проекцией вектора скорости на поперечную плоскость ZOX - углом скольжения  .
.
Для создания моментов, разворачивающих самолёт относительно той или иной оси необходимо к определённой точке конструкции самолёта приложить некоторые силы. Для создания этих сил используются специальные рулевые поверхности – органы управлениясамолёта. Отклонение рулевых поверхностей относительно аэродинамического нейтрального положения под действием аэродинамического потока, зависящего от скорости полёта и плотности воздуха, вызывает появление аэродинамической силы, которая, в свою очередь создаёт момент, разворачивающий самолёт относительно указанной оси [1.1].
Для управления полётом современного регионального или магистрального самолёта используется широкий набор аэродинамических поверхностей, которые перемещаются по командам пилота рулевыми приводами. На рис.1.2 показана схема расположения аэродинамических рулевых поверхностей современного пассажирского самолёта.

Рис.1.2
Поверхности управления полётом типового пассажирского самолёта: 1 – предкрылки (органы механизации крыла); 2 – элерон; 3 – закрылки; 4 – руль направления; 5 – руль высоты; 6 – переставляемый стабилизатор; 7 – поверхности увеличения подъёмной силы;
8 - воздушные тормоза; 9 – многофункциональные интерцепторы.
Все управляемые поверхности позиций 8 и 9 по существу являются многофункциональными спойлерами. Они широко используются и во время движения самолёта по земле после его приземления, могут использоваться для управления по крену во время полёта и даже для частичного разворота самолёта вокруг вертикальной оси. Закрылки и предкрылки самолёта относятся к так называемым системам механизации крыла. Эти системы активно работают только на режимах взлёта и посадки самолёта. К ним не предъявляются высокие требования по динамике, они не используются экипажем для активного изменения положения самолёта в пространстве, так как используются элероны, руль направления, руль высоты, интерцепторы, которые работают на протяжении всего полёта от взлёта до посадки. Поэтому мы будем рассматривать системы рулевых приводов поверхностей управления, которыми экипаж в процессе всего полёта постоянно манипулирует, изменяя положение самолёта по крену, тангажу и курсу. Это системы приводов элеронов, рулей высоты, руля направления. Именно эти системы приводов, в основном, определяют безопасность полёта. Эти приводы должны обеспечивать необходимое управление полётом при возникновении последовательности локальных отказов в самих системах рулевых приводов и во взаимодействующих с ними системах. Это очень трудная задача. Если при рассмотрении проблем обеспечения безопасности управления полётом маневренного самолёта по мере накопления отказов в системах приводов и во взаимодействующих с ними системах всегда оставался последний уровень безопасности, обеспечивающий возможность катапультирования пилота (или пилотов), то при проектировании систем приводов пассажирских самолётов такая ситуация недопустима. Система приводов рулевых поверхностей системы управления полётом всегда должна обеспечивать необходимый для безопасной посадки самолёта уровень работоспособности. Указанная задача обеспечения безотказности управления самолётом по всем тём осям решается использованием методов резервирования (подробно рассмотренных в главе 7), как энергетических каналов, обеспечивающих непрерывность потоков энергии к исполнительным механизмам рулевых приводов, так и каналов управления, обеспечивающих формирование управляющих сигналов и достоверную передачу их с усилением по мощности рулям самолёта.
Значительную роль в решении обеспечения необходимого уровня управления самолёта при возникновении локальных отказов в указанных выше подсистемах играет применение метода функционального резервирования. Как известно, этот метод заключается в таком построении структуры системы управления, при которой управление положением самолёта относительно любой из трёх осей может быть реализовано не только приводом, специально предназначенным для этого маневра, но и другим приводом, предназначенным для управления положением самолёта относительно другой оси. Например, управление по крену может осуществляться не только элеронами, но и отклонением спойлеров на одном крыле, создавая момент сил для поворота самолёта относительно продольной оси. Управление самолётом вокруг поперечной оси, в какой-то мере, может осуществляться не только двумя аэродинамическими поверхностями руля высоты, но и одной рулевой поверхностью горизонтального оперения или совместной работой элеронов и спойлеров. Поэтому, эти рулевые поверхности часто называют многофункциональными спойлерами. Наиболее критичным с этой точки зрения является система управления поворотом самолёта относительно вертикальной оси, т.е. рулём направления. Мировая практика создания современных пассажирских самолётов показывает, что при проектировании системы управления рулём направления применяются наиболее отработанные, часто консервативные, но апробированные и потому высоконадёжные конструкторские решения. Мы рассмотрим эти решения в настоящей главе.
На больших пассажирских самолётах наиболее ответственные рулевые поверхности, такие как рули высоты, элероны, рули направления делаются секционированными. Например, на самолётах А-340, А-380 широко применяется секционирование основных рулевых поверхностей. На каждую из этих аэродинамических поверхностей устанавливаются от двух до трёх рулевых приводов. Поэтому уровень безотказности системы управления самолёта с секционированием аэродинамических управляющих поверхностей будет, безусловно, выше. Этот уровень безопасности управления в Российской федерации определяется Авиационными правилами [1.2], которые, в свою очередь, во многом определяют кратность резервирования системы управления. Самолёт должен быть спроектирован и построен таким образом, чтобы в ожидаемых условиях эксплуатации при действиях экипажа в соответствии с РЛЭ:
· Каждое отказное состояние, приводящее к возникновению катастрофической ситуации, оценивалось как практически невероятное событие (вероятность <10-9 на час полета) и не возникало вследствие единичного отказа одного из элементов системы.
· Суммарная вероятность возникновения аварийной ситуации, вызванной функциональными отказами для самолёта в целом, не превышала 10-6 на час полёта. При этом рекомендуется, чтобы любой отказ, приводящий к аварийной ситуации, оценивался бы, как событие не более частое, чем крайне маловероятное (<10-7 на час полёта).
· Суммарная вероятность возникновения сложной ситуации, вызванного функциональными отказами для самолёта в целом, не превышала 10-4 на час полёта. При этом рекомендуется, чтобы любой функциональный отказ, приводящий к сложной ситуации, оценивался бы как событие не более частое, чем маловероятное событие (<10-7 на час полёта).
Функциональный отказ может быть отнесён к событиям практически невероятным, если выполняется одно из следующих условий [1.2]:
- Отказное состояние возникает в результате двух и более независимых последовательных отказов различных элементов рассматриваемой системы или взаимодействующих с ней систем с вероятностью менее 10-9 на час полёта по типовому профилю.
- Указанное состояние является следствием конкретного механического отказа (разрушение, заклинивание, рассоединение) одного из элементов системы, для чего разработчик системы должен обосновать практическую невероятность подобного отказа в соответствии с требованиями, которые изложены в 25 АП-25 [1.2].
Любой отказ, приводящий к возникновению аварийной или катастрофической ситуации должен рассматриваться вне зависимости от вероятности его возникновения. Такие отказы, при их возникновении, не должны препятствовать продолжению безопасного полёта и посадки самолёта и должны позволять экипажу справляться с последствиями отказа. При этом возможные последующие отказы в том же полёте, как выявленные, так и скрытые, или их комбинация должны также рассматриваться независимо от вероятности их возможного возникновения. Схемы и конструкции системы управления должны нивелировать последствия указанных отказов и обеспечивать безопасное продолжение полёта и посадку. Приведенные выше принципы оценки безопасности управления полётом должны использоваться при проектировании систем рулевых приводов пассажирских самолётов.
Следует иметь в виду, что под катастрофическими последствиями функционального отказа следует понимать прерывание непрерывного и безопасного полёта и невозможность обеспечения посадки самолета.
Схемные и конструкторские подходы, обеспечивающие безопасность управления полётом следующие:
1. Резервирование бортовых источников энергии, подводимой к исполнительным механизмам рулевых приводов.
2. Резервирование каналов управления и передачи сигналов к рулевым приводам.
3. Резервирование самих электрогидравлических приводов, управляющих рулевыми поверхностями.
4. Секционирование поверхностей управления.
5. Введение резервных каналов и устройств, обеспечивающих дополнительное управление при отказе основных штатных систем и устройств.
Разработка конструкции устройств рулевых приводов и взаимодействующих с ними устройств, обеспечивающих сохранение управления полётом при возникновении локальных отказов.
Рис.1.3
Схема построения системы управления по крену, тангажу и курсу пассажирского самолёта А320 [8.3]. Здесь Г, Ж, З – обозначения трёх гидравлических систем (голубая, жёлтая, зелёная);
Схема формирования потоков энергии для рулевых приводов самолёта.
Количество бортовых источников энергии и их структура во многом зависят от количества маршевых двигателей самолёта и типа применяемых на самолёте приводов рулевых поверхностей. Практика показывает, что для обеспечения указанного выше уровня безопасности управления полётом, необходимо три или четыре системы гидропитания рулевых электрогидравлических рулевых приводов. Кроме этого должен быть высоконадёжный электрический канал с напряжением постоянного тока с возможностью подключения в аварийном случае аккумулятора, а также вспомогательная энергетическая установка (ВСУ), которая получает первичную энергию от дополнительного реактивного двигателя, включаемого при возникновении аварийной ситуации, или от набегающего потока воздуха с помощью «крыльчатки», которую выпускают в воздушный поток. Вспомогательная силовая установка приводит в движение электрогенератор или насос резервной гидравлической системы, или и то, и другое. Пример фрагмента типового энергетического комплекса пассажирского самолёта показан на рис.1.4. На этом рисунке показаны не все потребители гидравлической энергии, а, в основном, только те приводы, которые управляют самолётом по крену, тангажу и курсу. Потребителями гидравлической энергии, кроме указанных выше рулевых приводов являются также гидравлические приводы механизации крыла, приводы выпуска, уборки и поворота шасси, перемещения стабилизатора и др. В этом гидрокомплексе первая и третья гидросистемы получают энергию от маршевых двигателей самолёта, а третья гидросистема – от двух электродвигателей. При отказе гидрокомплекса приводы, подсоединённые ко второй гидросистеме, могут получать гидравлическую и электрическую энергию от вспомогательной силовой установки (ВСУ) и (или) от «крыльчатки», которая выдвигается из корпуса самолёта в поток набегающего воздуха. Электрогидравлические приводы распределяются по гидросистемам таким образом, чтобы при отказе любой гидросистемы не возникало момента на разворот самолёта в горизонтальной плоскости.
Рис.1.4.
Пример схемы подключения к бортовым гидравлическим системам питания системы рулевых приводов, управления самолётом по крену, тангажу, курсу.
Как следует из представленной схемы гидравлического комплекса, механическая энергия, отбираемая от маршевых двигателей, непосредственно преобразуется в гидравлическую энергию с помощью двух насосов регулируемой подачи. Эти насосы образуют потоки жидкости под давлением Qл1 и Qп1 (соответственно на левом и правом крыле). Дополнительно к указанным двум насосам с непосредственным приводом от маршевых двигателей формируются дополнительные потоки рабочей жидкости Qл2 и Qп2 с помощью дополнительных насосов с электроприводом переменного тока, получающих электроэнергию от электросети переменного тока.
Литература:
1.1 Ю.Г. Оболенский, С.А. Ермаков, Р.В. Сухоруков. Введение в проектирование авиационных рулевых приводов. // Официальное учебное пособие по специальности 160603 «Системы приводов летательных аппаратов» М. Изд. ГУП ЮЗАО. 2011 г.
1.2 Авиационные правила, часть 25, раздел А-0. М. МАК. 2000 г.
|
|
|
Дата добавления: 2014-01-07; Просмотров: 738; Нарушение авторских прав?; Мы поможем в написании вашей работы!