КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
С ограничением развиваемого усилия
|
|
|
|
На рис.2.7показана схемапривода с жёсткой нелинейной обратной связью по давлению нагрузки. Если не включать в цепь обратной связи по давлению фильтр высоких частот, то такая обратная связь является «жёсткой». Она работает не только в динамике, но и в статических режимах. Статическая жесткость рулевого гидропривода с такой обратной свяью определяется следующим выражением:
В этом выражении
Кре – коэффициент усиления по давлению прямой цепи привода;
Кup – коэффициент передачи цепи обратной связи по давлению нагрузки.
Очевидно, что введение жёсткой обратной связи по давлению нагрузки уменьшает статическую жёсткость, а значит – и развиваемое приводом максимальное усилие. Если перепад на поршне гидроцилиндра меньше, чем зона нечувствительности |Fp/А|, то эта обратная связь не работает и не уменьшает развиваемую силу. Если же Рп > |Fp/А|, то жёсткость привода начинает уменьшаться. При больших значениях коэффициента усиления обратной связи по давлению Кup привод теряет жёсткость, т.е. теряет способность сопротивляться внешней силе, значит развиваемая им сила уменьшается.
Механическая характеристика этого привода показана на рис.2.8. Она характеризуется малым углом наклона, допустимой по ТЗ скоростью холостого хода и ограниченной скоростью в режиме действия помогающей нагрузки, а также требуемой по техническому заданию величиной развиваемой приводом силы Fp.
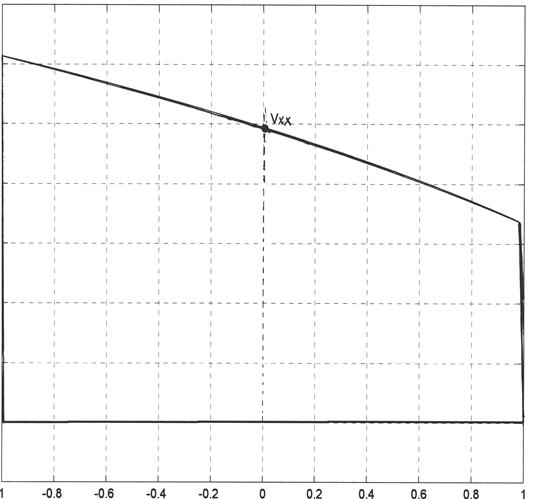 |
Рис.2.8
Механическая характеристика с нелинейной жёсткой обратной связью по перепаду давления на поршне гидроцилиндра: по горизонтальной оси отложена относительная нагрузка привода Fн/Fp, а по вертикальной оси скорость поршня (Vхх – скорость холостого хода)
Из изложенного выше можно сделать следующие выводы:
· Полученные выражения для компонентов нагрузки следящих приводов позволяют формировать желаемые механические характеристики гидравлических следящих приводов с минимальной энергетической избыточностью, но обеспечивающие требуемые механические характеристики следящего привода.
· Используя рассмотренный подход к синтезу базовых параметров исполнительного механизма, включающий расчет по критерию V=Vf, Vxx<Vхх.тз, Fp >Fp.min, а также введение в привод нелинейной обратной связи по давлению нагрузки, можно формировать желаемый наклон механической характеристики привода, описываемой участком параболы с фокусом в точке Fx > Fp.min, но с заданной развиваемой силой (Fp.min).
· Применение рассмотренного подхода к синтезу базовых параметров исполнительного механизма и схемотехники построения регулятора ограничения развиваемого приводом усилия целесообразно при заданной в ТЗ скорости выходного звена при максимальной эксплуатационной нагрузке и при заданной максимальной скорости поршня. В этом случае можно получить существенное снижение потребляемого приводом расхода рабочей жидкости. При этом развиваемую приводом максимальную силу можно задавать из условия обеспечения необходимой прочности узлов крепления привода.
Оценка параметров гидродвигателя поступательного действия исполнительного механизма рулевого привода.
Основным типом гидродвигателя исполнительного механизма рулевого гидропривода является гидроцилиндр. На протяжении многих лет в отечественной авиапромышленности отрабатывались конструкции гидравлических рулевых приводов и, в том числе, гидравлических цилиндров. Особенностью гидравлических цилиндров, выполняющих функции силового двигателя рулевого привода, является их непрерывная работа в течение всего полёта самолёта. Приводы других систем, например, приводы механизации крыла, приводы воздушных тормозов, приводы створок люков, приводы шасси и т.д. работают эпизодически. Поэтому требования к техническому ресурсу гидроцилиндров чрезвычайно велики. Длительность ресурса рулевых приводов должна быть свыше 40000 часов. При этом эти изделия должны обладать малой массой. Поэтому конструкции гидроцилиндров являются одним из ключевых элементов рулевых гидроприводов. В настоящем разделе рассматриваются типовые конструкции гидроцилиндров авиационных рулевых гидроприводов и их основных компонентов.
|
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 293; Нарушение авторских прав?; Мы поможем в написании вашей работы!