КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Оптимальных областей параметров привода
|
|
|
|
Рассмотрим решение задачи повышения устойчивости такого привода при одновременном повышении его быстродействия с использованием регуляторов состояния, как средства улучшения динамических характеристик рулевого привода в части повышения его демпфирования и быстродействия.
Как было сказано выше, электрогидравлический следящий привод, управляющий положением инерционного объекта, в линейном приближении и в предположении, что
 ,
,
описывается следующей передаточной функцией:  ; ( 4.1)
; ( 4.1)
Предположим, что коэффициент передачи привода
Кп=1/Кос =1. (4.2)
С целью нормирования знаменателя передаточной функции введём обозначение:
 где ωс=
где ωс= . (4.3)
. (4.3)
После подстановки в выражение (4.4.2)  получим следующий вид передаточной функции рулевого привода:
получим следующий вид передаточной функции рулевого привода:
 (4.4)
(4.4)
В этом выражении обобщённые коэффициенты a и b имеют следующий вид:
 (4.5)
(4.5)
 (4.6)
(4.6)
Первый коэффициент a характеризует собой демпфирование привода, а второй коэффициент b – обратную величину добротности позиционного контура привода.
 |


 Установившаяся величина
Установившаяся величина 
 |
Время
Рис.4.1
Вид переходного процесса рулевого привода с инерционной нагрузкой: Хн(t) выходная координата привода.
Динамику привода по переходному процессу можно оценить по следующим интегральным критериям, которые характеризуют быстроту затухания переходного процесса и величину перерегулирования [4.25].
1.
2.  (4.7)
(4.7)
3. 
4. 
Задача оптимизации контурных параметров приводаможет быть сформулирована следующим образом: определить некоторый вектор параметров привода  =
= такой, чтобы выбранный проектировщиком критерий, достигал своего минимума:
такой, чтобы выбранный проектировщиком критерий, достигал своего минимума:
 ) в области реализуемых параметров и выполнялись некоторые ограничения на показатели его характеристик
) в области реализуемых параметров и выполнялись некоторые ограничения на показатели его характеристик  .
.
Эта задача может быть решена на плоскости коэффициентов (а, b) [4.1] на которую нанесены оценки критериев 1,2,3,4 или показатели динамики. Достижение минимума каждого из критериев не обеспечивает одинаковую динамику привода. Минимум каждого из указанного критерия соответствуют различные переходные процессы и частотные характеристики.
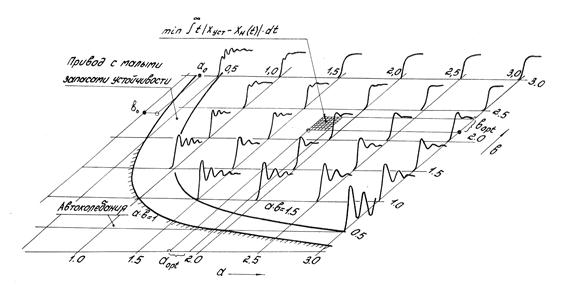
Рис.4.2
Общий вид переходных процессов рулевого привода при различных значениях обобщённых коэффициентов a, b: заштрихованная область соответствует минимуму интегрального критерия качества ITAE.
Оптимальные значения обобщенных коэффициентов а и b, обеспечивающие минимум соответствующего критерия и оценки динамики привода приведены ниже:

 1. min IAE
1. min IAE  ¸
¸ 
 |  | ||
2. min IAES  ¸
¸ 
 | |||
 | |||
3. min ITAE  ¸
¸  (4.8)
(4.8)
Оптимальное значение добротности привода с точки зрения обеспечения минимума критерия ITAE является следующая оценка:
 .
.
Динамику такого привода можно представить на плоскости обобщенных коэффициентов (а, b). Любой i -й проект привода на плоскости обобщённых коэффициентов представляется точкой (ai,bi), которая характеризует его наиболее существенные динамические свойства. Например, на рис.4.5 показана зависимость величины резонансного пика амплитудночастотной характеристики рулевого привода от значений параметров (а, b).
А на рис.4.4.2 показана плоскость коэффициентов с видом переходных процессов привода на ступенчатый сигнал управления при различных значениях а, b [4.23]. Зависимость величины перерегулирования в переходном процессе выходной координаты от параметров a, b показана на рис.4.3.
Эта величина часто задаётся в технических требованиях к рулевому приводу. Задаваясь допустимым значением величины перерегулирования можно определить требуемые значения коэффициентов a, b, а затем и контурные параметры привода. Частотные характеристики в функции безразмерной частоты  , и коэффициентов а, b описывается выражением:
, и коэффициентов а, b описывается выражением:
 (4.9)
(4.9)
Значения максимума частотной характеристики привода показаны на рис.4.4.
\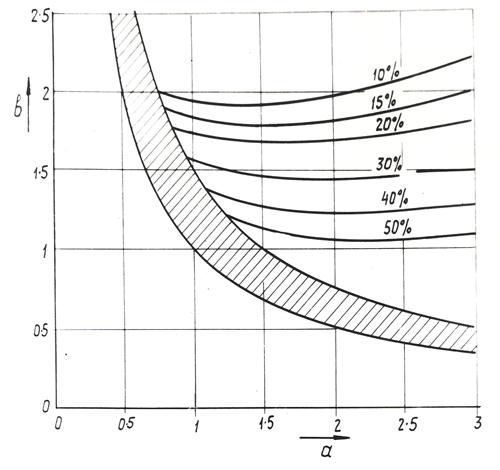
Рис.4.3
Показатель величины перерегулирования выходной координаты привода при отработке ступенчатого входного сигнала в функции обобщённых параметров привода.
|
|
|
Дата добавления: 2014-01-07; Просмотров: 325; Нарушение авторских прав?; Мы поможем в написании вашей работы!