КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Тема 6. Проектирование регуляторов состояния электрогидравлических приводов с инерционной нагрузкой с использованием наблюдающих устройств
|
|
|
|
Если ускорение и скорость перемещения выходной координаты измерить невозможно, а введение обратной связи по давлению нагрузки приводит к появлению недопустимых фазочастоных искажений, то в таком случае следует рассмотреть возможность использования регулятора состояния с наблюдающим устройством. Такое схемотехническое решение относительно просто реализуется при жесткой связи поршня гидроцилиндра с инерционным объектом или при установке датчика позиционной обратной связи на объекте управления. Структурная схема привода с таким регулятором состояния, содержащим наблюдающее устройство, показана на рис.6.1.
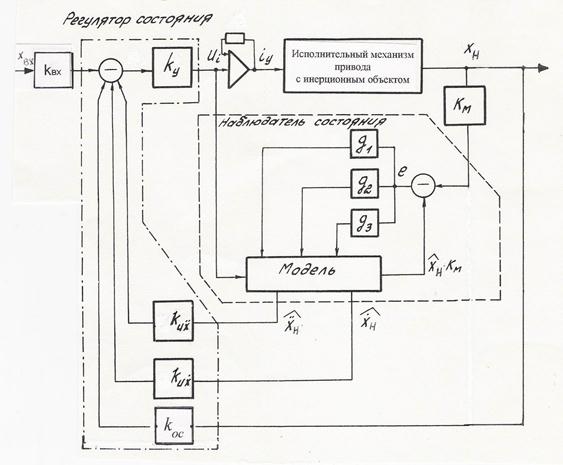
Рис.6.1
Схема коррекции привода обратными связями по состоянию с использованием наблюдающего устройства.
Здесь: Км – масштабный коэффициент численно равный коэффициенту позиционной обратной связи (Кос);  - оценки координат состояния привода, полученные наблюдающим устройством; g1, g2, g3 – коэффициенты подстройки модели объекта. Ui – сигнал пропорциональный току управления в обмотке ЭГУ.
- оценки координат состояния привода, полученные наблюдающим устройством; g1, g2, g3 – коэффициенты подстройки модели объекта. Ui – сигнал пропорциональный току управления в обмотке ЭГУ.
Наблюдающее устройство привода предназначено для восстановления координаты скорости объекта управления и его ускорения. Оно состоит из модели исполнительного механизма, отражающей его наиболее существенные динамические свойства, которая реализуется программно с помощью микровычислителя, системы компенсации ошибки измерения координат, возникающей вследствие влияния нестабильных конструктивно-технологических факторов, и системы обратной связи по восстановленным координатам состояния. Модель наблюдающего устройства должна отображать наиболее существенные динамические свойства исполнительного механизма корректируемого привода. Выберем указанную модель в виде уравнения 3-го порядка:
 . (6.1)
. (6.1)
Это уравнение составлено относительно 3-й, 2-й и 1-й производных оцениваемых координат исполнительного механизма привода. kvu – коэффициент усиление прямой цепи исполнительного механизма по скорости. Ui – напряжение на входе в электрогидравлический усилитель мощности.
Введем следующие переменные состояния исполнительного механизма привода:

 (6.2)
(6.2)
Позиционная ошибка между выходной координатой модели наблюдающего устройства и координатой объекта управления равна:
 (6.3)
(6.3)
Составим уравнения состояния модели наблюдающего устройства для координат х1, х2, х3. Для этого:
Дифференцируя первое уравнение системы (6.2) получим
 Но из второго уравнения системы (6.2) можно получить соотношение:
Но из второго уравнения системы (6.2) можно получить соотношение:

Следовательно, с учётом подстройки модели под реальный объект можно получить следующее уравнение для 1-й координаты состояния:
 (6.4)
(6.4)
Из второго уравнения системы (6.2), дифференцируя второе уравнение можно получить:
Но из третьего уравнения системы (6.2)  Следовательно, уравнение модели для второй координаты состояния с учётом подстройки под реальный объект будет иметь следующий вид:
Следовательно, уравнение модели для второй координаты состояния с учётом подстройки под реальный объект будет иметь следующий вид:
 (6.5)
(6.5)
Дифференцируя третье уравнение системы (6.2) получим выражение для третьей координаты состояния наблюдающего устройства:
 (6.6)
(6.6)
Уравнения модели, описывающего движение объекта с учётом наиболее существенных факторов, нами получено в форме (6.44), объединяя выражения (6.44) и (6.49) получим уравнение для третьей координаты состояния привода с учётом сигнала подстройки модели под объект:
 (6.7)
(6.7)
Выходными координатами наблюдающего устройства для построения регулятора состояния являются координаты х3, из которой получаем оценку ускорения объекта:
 (6.8)
(6.8)
Выражения для оценки скорости и ускорения объекта (6.1) используются для построения регулятора состояния привода в следующем виде:
 . (6.9)
. (6.9)
В этом выражении коэффициенты регулятора состояния по ускорению и скорости объекта определяются из условия придания системе привода желаемых динамических свойств.
 (6.10)
(6.10)
Схема модели, отражающая наиболее существенные динамические свойства исполнительного механизма привода с инерционной нагрузкой, представлена на рис.6.2.

Рис.6.2
Схема модели исполнительного механизма модели рулевого привода для использования в регуляторе состояния. Обозначения приведены в вышеприведенном тексте.
aopt и bopt – оптимальные значения обобщённых коэффициентов привода с инерционным объектом, которые обеспечивают желаемые динамические свойства привода, а К д.тр. – требуемое значение добротности позиционного контура привода, которое обеспечивает требуемое быстродействие привода. Таким образом, реализуется комплекс обратных связей привода по приближённым оценкам его координат состояния (скорости объекта и его ускорению). В описанном корректирующем устройстве все координаты известны за исключением коэффициентов подстройки g1, g2, g3. Эти коэффициенты выбираются из условия устойчивости подсистемы регулятора состояния и обеспечения его быстродействия.
В [6.2] приводятся формулы для оценки приближённых значений коэффициентов подстройки наблюдающего устройства под объект коррекции при некоторых отклонениях параметров модели. Вот эти формулы для оценки указанных коэффициентов подстройки:
 ;
;
 ; (6.11)
; (6.11)
 .
.
Здесь коэффициенты aн и bн – обобщённые коэффициенты, характеризующие динамику наблюдающего устройства, как динамическую систему, которая должна быть устойчивой и не иметь колебательного процесса при оценке параметров привода. Из условия отсутствия колебаний в системе наблюдающего устройства. можно выбрать эти коэффициенты, обеспечивающие минимум критерия ITAE: aн=1.75; bн=2.15. Так как переходные процессы в наблюдающем устройстве должны протекать быстрее, чем в оцениваемой системе привода, то рекомендуется [6.2] выбирать из условия:
 (6.12)
(6.12)
Практика проектирования таких наблюдающих устройств показывает, что в некоторых случаях уже при значении указанного отношения равного 2 могут возникнуть автоколебания. После предварительной аналитической оценки этих коэффициентов подстройки необходимо их уточнить методом математического моделирования. На рис.6.3 приведены экспериментальные переходные процессы и частотные характеристики привода, управляющего положением инерционного объекта без регулятора состояния, характеризующиеся высокой колебательностью (в левой части рисунка), и с регулятором состояния, который включал в себя описанное выше наблюдающее устройство (в правой части рисунка).
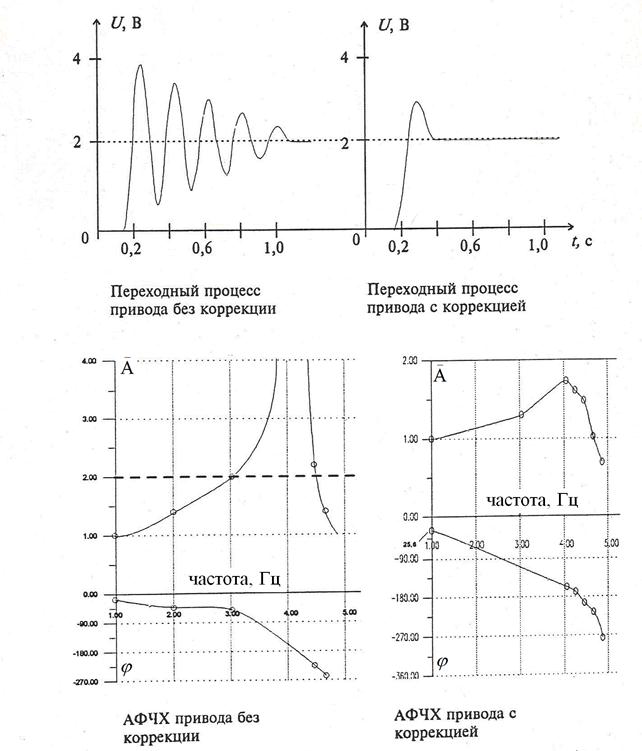
Рис. 6.3
Экспериментальные динамические характеристики привода с большой инерционной нагрузкой без регулятора (слева) и с регулятором состояния, который включает наблюдающее устройство (справа).
Здесь:  - амплитудно-частотная характеристика привода; φ – фазочастотная характеристика привода; U – сигнал с датчика положения выходной координаты привода; пунктирной линией показаны допустимые амплитудные искажения сигнала управления.
- амплитудно-частотная характеристика привода; φ – фазочастотная характеристика привода; U – сигнал с датчика положения выходной координаты привода; пунктирной линией показаны допустимые амплитудные искажения сигнала управления.
Приведенные оценки динамики привода с регулятором состояния свидетельствуют об эффективности такого способа коррекции привода, управляющего положением инерционного объекта с малым собственным демпфированием.
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 472; Нарушение авторских прав?; Мы поможем в написании вашей работы!