КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Регулирование скорости машин переменного тока (асинхронные машины)
|
|
|
|
Существует 7 способов:
1). Реостатное;
2). Переключением числа пар полюсов;
3). Изменением частоты питающего напряжения;
4). Каскадным включением асинхронного двигателя с другими машинами и преобразователями;
5). Импульсное регулирование;
6). Изменением питания напряжения на статоре;
7). С помощью электромагнитные муфты скольжения.
Самый перспективный – это частотное управление, ну и изменение напряжения.
ОС испытывают только в 3 и 6 методе.
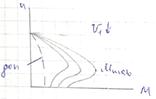 При таком изменении U, диапазон 5:1.
При таком изменении U, диапазон 5:1.
Если ОС будет по скорости, то диапазон регулирования будет порядка 20.
Частотное регулирование скорости асинхронного двигателя:
На сегодня это самый совершенный привод, хотя меняется ряд параметров.
КПД=0,96; Dрег=10000 – 15000 (если двигатель хороший, то можно поднять до 60 тыс. об.).
Недостатки:
- изменение момента;
- перегрузочная способность (Mmax).
Реализация частотного управления: электромашинная, без машинная.
Электромашинная работает в системе Г-Д, которая вращает асинхронный двигатель.
1). Система Г-Д
2). Генератор заменяет тиристорным управлением
3). Каскадное управление на 14 тиристорах
4). При управлении инверторами
5). ШИП
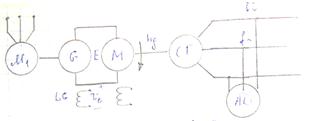
Запустим M1. Меняя ЭДС в G, меняю напряжение и частоту. КПД 0,6-0,5

М1 питает G, G питает М. Мы меняя влияем на СГ. А через СГ меняется скорость и частота.
Статический преобразователь частоты:
1). С непосредственной связью (из 18 тиристоров включенных в 3-х фазную нулевую схему). Но они не пошли: мал Dрег. скорости, мал cosφ. Применяется в асинхронных двигателях с фазовым ротором.
2). Преобразователь частоты с промежуточным звеном постоянного тока.
Схема инвертора:
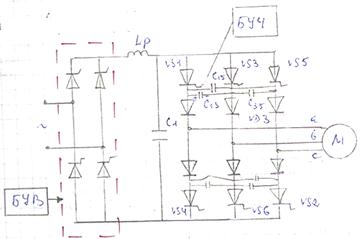 БУВ – его задача – задать нужное напряжение. Надо убрать пульсацию (ставив дроссель).
БУВ – его задача – задать нужное напряжение. Надо убрать пульсацию (ставив дроссель).
С1 – потребляет реактивную мощность.
Подавая импульсы различной частоты создаю 3-х фазовую систему. Эти схемы работают в 2-х конструктивных вариантах:  =120 градусов (данная рассматриваемая схема) и =180 градусов.
=120 градусов (данная рассматриваемая схема) и =180 градусов.
Открываю VS1, VS2 ток идет по фазе ia. С13 отраб. 60 градусов открывает VD3.
Диод – чтоб обратный ток не пошел C13 зарядился, запрет тиристор VS1.
Эпюры напряжения работы инвертора.
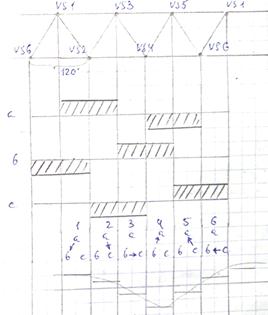 Недостаток: синусоида идет ступенчато.
Недостаток: синусоида идет ступенчато.
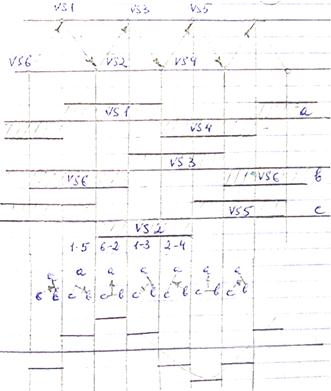
73 Автономный инвертор напряжения с рабочим интервалом открытия тиристоров l=180 гр.
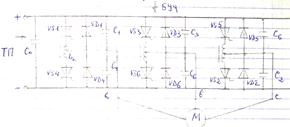
 пусть открывается тиристор US1, при этом C1 разряжен, а С4 заряжен с + на верхней обмотке. Для запирания US1 дается запирающий импульс US4. Через открывающий US4 разряжается С4. Изменение тока в нижней части реактора Lk, вызывает в верхней части Lk вызывает ЭДС, направленное навстречу Uд, закрывает US1. С1 более не закороченный US1.
пусть открывается тиристор US1, при этом C1 разряжен, а С4 заряжен с + на верхней обмотке. Для запирания US1 дается запирающий импульс US4. Через открывающий US4 разряжается С4. Изменение тока в нижней части реактора Lk, вызывает в верхней части Lk вызывает ЭДС, направленное навстречу Uд, закрывает US1. С1 более не закороченный US1.
Чтобы избавиться от отклонений от синусоиды используют ШИМ.
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 1364; Нарушение авторских прав?; Мы поможем в написании вашей работы!