КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Линйного программирования
|
|
|
|
ТРАНСПОРТНАЯ ЗАДАЧА
Основная задача линейного программирования
Различные практические задачи, сводящиеся к схеме линейного программирования, могут иметь линейные ограничения вида неравенств, другие – равенств, третьи как тех так и других.
Задача линейного программирования с ограничениями—равенствами носит название основной задачи линейного программирования (ОЗЛП).
Основная задача линейного программирования ставится следующим образом.
Имеется ряд переменных
x1, x2,......, x n.
Требуется найти такие неотрицательные значения этих переменных, которые удовлетворяли бы системе линейных уравнений:
a11 x 1 + a12 x 2 +.... + a1n x n = b 1;
a21 x 1 + a22 x 2 +.... + a2n x n = b 2;
(2.1)
.......................... ….
am1 x 1 + am2 x 2 +.... + amn x n = b m,
и, кроме того, ОБРАЩАЛИ БЫ В МИНИМУМ линейную функцию
L = c1 x1 + c2 x2 + …….+ cn xn. (2.2)
Очевидно, случай, когда линейную функцию нужно обратить не в минимум, а в максимум, легко сводится к предыдущему, если изменить знак функции и рассмотреть вместо нее функцию
L׳ = -- L = -- c1 x1 -- c2 x2 -- …….-- cn xn. (2.3)
Условимся называть д о п у с т и м ы м решение ОЗЛП любую совокупность переменных
x1 ≥ 0, x2 ≥ 0, ……, x n ≥ 0,
удовлетворяющую уравнениям (2,1).
О п т и м а л ь н ы м решением будем называть то из допустимых решений, при которым линейная функция (2.2)
обращается в минимум.
ОЗЛП необязательно должна иметь решение. Может оказаться, что уравнения (2.1) противоречат друг другу; может оказаться, что они имеют решение, но не в области отрицательных значений x1, x2,....., x n.
Тогда ОЗЛП не имеет допустимых решений.. Наконец, может оказаться, что допустимые значения ОЗЛП существуют, НО СРЕДИ НИХ НЕТ ОПТИМАЛЬНОГО: ФУНКЦИЯ L в области допустимых решений неограниченна снизу.
Вопрос о существовании неотрицательных значений x1, x2,....., x n, удовлетворяющих системе уравнений (2.1) рассматривается в специальном разделе математики – линейной алгебре.
2.3 Геометрическая интерпретация основной задачи линейного программирования
Рассмотрим пример 1. Найти max (2 x1 + 5 x2) = z при условиях x1 ≤ 400, x 2 ≤ 300,
x1 + x 2 ≤ 500, x1 ≥ 0, x 2 ≥ 0.
Каждое из этих неравенств – ограничений определяет полуплоскости, пересечение которых дает многоугольник, который заштрихован на рис. 1. Этот многоугольник (выпуклый многогранник) и представляет собой допустимое множество решений К задачи линейного программирования.
\
Рассмотрим целевую функцию f (x1, x2) = 2 x1 + 5 x2.
Пусть f (x1, x2) = 1000 = z1. График уравнения 2 x1 + 5 x2 = 1000 представляет собой прямую с отрезками на осях x1 = 500 единиц, а x2 = 200 единиц.
2 x1 / 1000 + 5 x2 / 1000 = x1 / 500 + x2 / 200 = 1.
При f (x1, x2) = 1500, получим прямую z2, имеющую уравнение
2 x1 / 1500 + 5 x2 / 1500 = x1 / 750 + x2 / 300 = 1.
Прямая z2 параллельна прямой z1, но расположена выше ее. Двигая прямую вверх параллельно самой себе, приходим к положению zmax, когда прямая и множество К будут иметь только одну общую точку А. Очевидно, что точка А (x1 = 200; x2 = 300) оптимальное решение, так как она лежит на прямой с максимально возможным значением zmax. Заметим, что эта точка оказалась крайней точкой множества К.
Пример 2. Задача линейного программирования с семью переменными
x1, x2, x3, x4, x5, x6, x7
имеет m = 5 уравнений – ограничений:
x1 -- x2 + x3 = 4;
2 x1 -- x2 -- x3 -- x4 = --5; (2.4)
x1 + x2 -- x5 = -- 4;
x2 + x6 = 5;
2 x1 -- 2 x2 -- x6 + 2 x7 = 7.
Требуется дать ее геометрическую интерпретацию и построить область допустимых решений ОДР, если она существует.
Решение. Выберем в качестве свободных переменных, например, x1 и x2 и выразим через них остальные (базисные) переменные: x3, x4, x5, x6, x7. Из первого уравнения имеем:
x3 = -- x1 + x2 + 4 (2.5)
Из третьего
х5 = x1 + x2 + 4.
Из четвертого:
х6 = -- x2 + 5. (2.6)
Подставляя (2.5) во второе уравнение(2.3) и (2.6) -- в последнее и разрешая относительно x4 , x7, имеем:
х4 = 3х1 -- 2х2 + 1;
х7 = --х1 + ½ х2 + 6.
Геометрическая интерпретация задачи представлена на рис. 2 (прямые x1 = 0, x2 = 0 – оси координат; остальные ограничивающие прямые x3 = 0, x4 = 0, x5 = 0, x6 = 0,и x7 = 0;
короткой штриховкой помечены допустимые полуплоскости -- условия неотрицательности переменных).

Как видно из расположения прямых и отмеченных полуплоскостей, допустимые решения для рассмотренной задачи существуют; они заполняют ОДР, которая на рис.2 показана закрашенной.
Далее найдем оптимальное решение ОЗЛП, обращающее в минимум линейную функцию семи неизвестных:
L = x1 -- x2 + 2x3 -- x4 -- 3x5 + x6 -- 2x7 (2.7)
Выше были указаны условия-ограничения (2.4)., которые были разрешены относительно базисных переменных x3, x4, x5, x6, x7, которые были выражены через свободные х1 и х2:
x3 = -- x1 + x2 + 4
х4 = 3х1 -- 2х2 + 1;
х5 = x1 + x2 + 4. (2.8)
х6 = -- x2 + 5.
х7 = --х1 + ½ х2 + 6.
Подставляя эти выражения в (2.7) и приводя подобные члены, имеем:
L = -- 5x1 -- 2x2 -- 12. (2.9)
Воспроизведем область допустимых решений, ранее построенную на рис. 2 (рис.3).
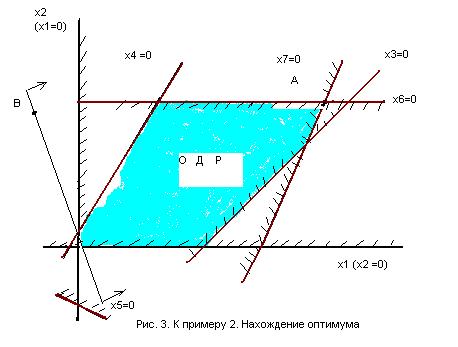
Отбрасывая свободный в (2.9), имеем:
L* = -- 5x1 -- 2x2.
Строим основную прямую L* = 0. Для этого откладываем отрезки γ2 = -- 2 по оси абсцисс и -- γ1 = 5 по оси ординат, проводим через точку В с координатами (--2, 5) прямую L* = 0 и отмечаем стрелками направление убывания L*. перемещая основную прямую параллельно самой себе в сторону убывания L*, наименьшее значение L* мы получим в точке А (наиболее удаленной от начала координат в направлении стрелок). Координаты этой точки х1*, х2* и дают оптимальное решение ОЗЛП. В точке А пересекаются две ограничивающие прямые: х6 = 0 и х7 = 0. Приравнивая нулю выражения для х6 и х7, получим два уравнения:
-- х2 + 5 = 0
--х1 + ½ х2 + 6 = 0
Решая их совместно, найдем х1* = 8,5; х2* = 5.
Подставляя эти значения в (2.9), найдем оптимальные значения базисных переменных: х3* = 0,5; х4* = 16,5; х5* = 17,5.
Что касается х6 и х7, то их оптимальные значения равны нулю: х6* = 0;
Х7* = 0.
Подставляя найденные оптимальные значения х1* и х2* в линейную функцию (2.9), найдем минимальное значение (оптимум) линейной функции L:
L = -- 5•8,5 -- 2• 5 -- 12 = --64,5.
Таким образом решаются задачи ОЗЛП в частном случае, когда m = n -- 2, при помощи геометрического построения.
2.4. Симплекс метод решения задачи
линейного программирования
Геометрическая интерпретация при решении задач линейного программирования перестает быть пригодной для этой цели при числе свободных переменных n –m > 3, а затруднительной уже при n –m = 3.
Для нахождения задачи линейного программирования в общем случае применяются не геометрические, а вычислительные методы. Из них наиболее универсальным является так называемый с и м п л е к с – м е т о д.
Пусть в задаче имеется n переменных и m независимых линейных ограничений, заданных в форме уравнений. Известно, что оптимальное решение (если оно существует) достигается в одной из опорных точек (вершин ОДР), где по крайней мере k = n -- m из переменных равны нулю. Выберем какие-то k переменных в качестве свободных и выразим через них остальные m базисных переменных. Пусть, например, в качестве свободных выбраны первые k = n -- m переменных х1,х2,..... х k, а остальные через них:
xk+1 = α k+1,1 x 1 + α k+1,2 x 2 +.....+ α k+1,k x k + β k+1,
xk+2 = α k+2,1 x 1 + α k+2,2 x 2 +.....+ α k+2,k x k + β k+2, (2.10)
.................................................
x n = α n,1 x 1 + α n,2 x 2 +.....+ α n,k x k + β n.
Попробуем, что будет, если положить все свободные переменные х1,х2,..... х k равными нулю:
х1 = 0, х2 = 0,....., х k = 0.
При этом получим:
x k=1 = β k+1, x k=2 = β k+2,...., x n = β n .
Это решение может быть допустимым или недопустимым. Оно допустимо, если все свободные члены неотрицательны. Предположим, что это условие выполнено. Тогда мы получили о п о р н о е р е ш е н и е. Но является ли оно оптимальным? Чтобы это проверить, выразим минимизируемую линейную функцию L через свободные переменные х1,х2,..... х k:
L = γ0 + γ1 х 1 + γ2 х 2 +.... + γk х k. (2.11)
Очевидно, что при х1 = х2 =.....= х k = 0 L = γ0. Посмотрим, не можем ли мы улучшить решение, т.е. уменьшить функцию L, у в е л и ч и в а я какие-нибудь из переменных х1,х2,..... х k (уменьшать мы их не можем, т.к. все они равны нулю, а отрицательные значения переменных недопустимы). Если все коэффициенты γ1, γ2,..... γ k в выражении (2.11) п о л о ж и т е л ь н ы, то, увеличивая какие-то из переменных х1,х2,..... х k сверх нуля, мы не можем уменьшить L; следовательно найденное нами опорное решение является о п т и -м а л ьн ы м. Если же среди коэффициентов γ1, γ2,..... γ k в выражении (2.11) есть отрицательные, то, увеличивая некоторые из переменных х1,х2,..... х k, а именно –те, коэффициенты при которых отрицательны, мы можем улучшить решение, т.е. уменьшить L.
Пример 3. Имеется задачалинейного программирования с ограничениями-неравенствами:
--5х1 -- х2 + 2х3 ≤ 2,
--х1 + х3 + х4 ≤ 5, (2.12)
--3х1 + 5 х2 ≤ 7.
Требуется минимизировать линейную функцию
L = 5х1 -- 2х3 .
Решение. Приводя неравенства к стандартному виду (≥ 0) и вводя добавочные переменные y1, y2, y3, переходим к условиям-равенствам:
y1 = 5х1 + х2 -- 2х3 + 2,
у2 = х1 -- х3 -- х4 + 5, (2.13)
у3 = 3х1 -- 5 х2 + 7.
Число переменных n = 7 на 4 превышает число уравнений m = 3. Значит, четыре переменных могут быть выбраны в качестве свободных.
Попробуем выбрать в качестве свободных переменных х1, х 2, х 3, х4 и положить их равными нулю. При этом получим опорное решение
х1 = х 2 = х 3 = х4 = 0; у1 = 2; у2 = 5; у3 = 7.
При этих значениях переменных L = 0.
Посмотрим, является ли это решение оптимальным? Нет! Потому что в выражении линейной функции L коэффициент при х 3 отрицателен. Значит, увеличивая х 3 , можно уменьшить L.
Попробуем увеличивать х 3 . Проследим по по уравнениям (2.13), опасно ли это для других переменных? Да, опасно для y1 и у2 -- в оба эти уравнения переменная х 3 с отрицательным коэффициентом, значит, при увеличении х 3 соответствующие переменные y1 и у2 могут стать отрицательными.
Посмотрим, какая из этих переменных y1 или у2 раньше обратится в нуль при увеличении х 3 . Очевидно, y1 ; она станет равной нулю при х 3 = 1, а у2 -- только при х 3 = 5.
Поэтому выбираем переменную y1 и вводим ее в число свободных вместо х 3 . Чтобы «переразрешить» систему (2.13) относительно х 3 , у2 , у3 , поступим следующим образом. Разрешим первое уравнение (2.13) относительно новой базисной переменной х 3 :
х 3 = 5/2 х1 + ½ х2 -- ½ y1.
Это выражение вместо х 3 подставим во второе уравнение; получим
у2 = -- 3/2 х1 -- ½ х2 + ½ у1 --х4 + 4.
Что касается третьего уравнения, то оно, как не содержащее х 3 , не изменится. Итак, мы привели систему (2.13) к виду:
х 3 = 5/2 х1 + ½ х2 -- ½ y1,
у 2 = -- 3/2 х1 -- ½ х2 + ½ у1 -- х4 + 4, (2.14)
у3 = 3х1 -- 5 х2 + 7
со свободными переменными х1, х2, у1, х4 и базисными х 3, у 2, у3.
Выразим линейную функцию L через новые свободные переменные:
L = 5х1 -- 5х1 -- х2 + у1 -- 2,
или
L = -- х2 + у1 -- 2. (2.15)
Положим теперь свободные переменные равными нулю. Линейная функция L станет равной –2. Это уже лучше, чем прежнее значение L = 0. Но является ли это решение оптимальным? Все еще нет, т.к. коэффициент при х2 в выражении (2.15) отрицателен. Итак, будем увеличивать х2. Посмотрим, для какой из переменных, стоящих в левых частях системы (2.14), это может быть «опасно». Только для у 2 (в первое уравнение х2 входит с положительным коэффициентом, а в третье совсем не входит).
Итак, обменяем местами переменные х2 и у 2 -- первую выведем из числа свободных, а вторую - введем. Для этого разрешим второе уравнение (2.14) относительно х2 и подставим это х2 в первое уравнение. Получим еще один вид системы (2.13):
х3 = х1 -- у 2 -- х4 + 5;
х2 = -- 3х1 -- 2у2 + у1 --2х4 + 8; (2.16)
у3 = 3х1 -- 5 х4 + 7.
Выразим L через новые свободные переменные:
L = 3х1 + 2у2 -- у1 + 2 х4 -- 8 + у1 -- 2,
или
L = 3х1 + 2у2 + 2х4 -- 10. (2.!?)
Полагая х1 = у1 = х4 = 0, получим
L = -- 10.
Является ли это решение оптимальным? На этот раз - да, так как коэффициенты всех свободных переменных в выражении (2.17) неотрицательны.
Итак, оптимальное решение ОЗЛП найдено:
х1* = 0, х2* = 8, х3* = 5, х4* = 0, у1* = 0, у2 = 0; у3 = 7.
При таких значениях переменных линейная функция принимает минимальное значение:
Lmin = --10.
Заметим, что в рассмотренном примере нам не пришлось искать опорного решения: оно сразу же получилось, когда мы положили свободные переменные равными нулю. Это объясняется тем, что в уравнениях (2.13) все свободные члены были неотрицательны и, значит, первое же попавшееся оказалось опорным. Если это окажется не так, можно будет прийти к опорному решению с помощью такой же процедуры обмена местами некоторых базисных и опорных переменных, переразрешая уравнения до тех пор, пока свободные члены не станут отрицательными.
При решении практических задач обычно используется обычно используется табличный алгоритм замены базисных переменных. Процедура «переразрешения» системы уравнений-ограничений ОЗЛП при этом сводится к заполнению стандартных таблиц по определенной системе правил [ Л.6,7,8].
Симплекс-метод решения задачи линейного программирования является универсальным и применим для решения любых таких задач. Однако существуют некоторые частные типы задач линейного программирования, которые допускают решение более простыми методами. К ним, в частности, относится и транспортная задача.
Классическая транспортная задача ЛП формулируется следующим образом.
Имеется m пунктов отправления: А1, А2,...... : Аm., в которых сосредоточены запасы какого-то однородного товара в количестве соответственно а1, а2, аm, единиц. Имеется также n пунктов назначения:
В1, В2,........ Вm, подавших заявки соответственно на b1, b2,.....bn, единиц товара.
Предполагается, что сумма всех заявок равна сумме всех запасов.
 (3.1)
(3.1)
Известна стоимость с ij перевозки единицы товара от каждого пункта отправления Ai до каждого пункта назначения Bj. Таблица (матрица) стоимостей перевозки с ij задана:
Требуется составить такой план перевозок, при котором все заявки были бы выполнены, и при этом общая стоимость всех перевозок была минимальной.
Дадим этой задаче математическую формулировку. Обозначим x i j - количество товара, направляемого из i-го пункта отправления Ai в j – й пункт назначения Bj (i = 1,..., m; j = 1,... n). Неотрицательные переменные х11, х12,...., хmn (число которых, очевидно, равно (m × n) должны удовлетворять следующим условиям:
1. Суммарное количество товара, направляемое из каждого пункта отправления во все пункты назначения, должно быть равно запасу товара в данном пункте. Это дает нам m условий-равенств;
х11 + х12 +.... + х1 n = а1,
х21 + х22 +.... + х2 n = а2, (3,2)
........................
х m1 + хm2 +.... + хm n = а m.
2. Суммарное количество товара, доставляемое в каждый пункт назначения изо во всех пунктов отправления, должно быть равно заявке, поданной каждым пунктом. Это даст n условий-равенств:
х11 + х21 +.... + х m1 = b1,
х12 + х22 +.... + хm2 = b2, (3.3)
........................
х 1n + х2n +.... + хm n = bn.
3. Суммарная стоимость всех перевозок, т.е. сумма величин х i j , умноженных на соответствующие стоимости с i j должна быть минимальной:
L = c11 x11 + c12 x12 +.... + c1n x1n + c21 x21 + c22 x22 +....
c2n x2n +.... + cm1 x m1 + cm2 x m12 +.... + cm n x m n = min. (3.4)
Функция (3.4) линейна, ограниченная – равенства (3.2),(3.3) также линейны. Перед нами типичная задача с ограничениями – равенствами (ОЗЛП).
Как и всякую другую задачу линейного программирования, ее было бы решить симплекс-методом, но данная задача имеет некоторые особенности, позволяющие решить ее более просто. Причиной является то, что все коэффициенты при переменных в уравнениях (3.2),(3.3) равны единице. Кроме того имеет значение структура связи между условиями. Нетрудно убедиться, что не все m + n уравнений нашей задачи являются независимыми. Действительно, складывая между собой все уравнения (3.2) и все уравнения (3.3) мы должны получить одно и то же, в силу условия (3.1). Таким образом, условия (3.2), (3.3) связаны одной линейной зависимостью, и фактически из этих уравнений только m + n -- 1, а не m + n являются линейно независимыми. Значит, ранг системы уравнений (3.2),(3.3) равен
r = m + n --1
а, следовательно, можно разрешить эти уравнения
относительно m + n --1 базисных переменных, выразив их через остальные, свободные.
Подсчитаем количество свободных переменных. Оно равно:
k = mn -- (m + n –1) = mn -- m – (n –1) =
= m(n -- 1) – (n –1) = (m—1) (n –1).
Мы знаем, что в задаче линейного программирования оптимальное решение достигается в одной из вершин ОДР, где по крайней мере k переменных обращается в нуль. Значит в нашем случае для оптимального плана перевозок по крайней мере (m—1) (n –1) значений x i j должны быть равны нулю.
Терминология. Независимо от того, что, транспортируется, откуда и куда (в условиях электроснабжения это может быть передача электроэнергии от электростанций потребителям)
значения x i j количества единиц транспортируемого продукта, направляемых из пункта Аi
в пункт Вj мы будем называть п е р е в о з к а м и.
Любую совокупность значений (x i j ) (i = 1,...., m; j = 1,... n), будем называть планом перевозок, или просто планом.
План (x i j ) будет называться д о п у с т и м ы м, если он удовлетворяет условиям (3.2).(3.3)
(балансовым условиям)6 все заявки удовлетворены, все запасы исчерпаны.
Допустимый план будет о п о р н ы м, если в нем отличны от нуля не более r = m + n --1
базисных перевозок x i j, а остальные равны нулю.
План (x i j ) будем называть оптимальным, если он среди всех допустимых планов приводит к наименьшей стоимости всех перевозок.
Методы решения транспортной задачи сводятся к простым операциям непосредственно с таблицей, где в определенном порядке записаны все условия транспортной задачи. Такую таблицу называют т р а н с п о р т н о й т а б л и ц е й.
В транспортной таблице записываются
1) пункты отправления и назначения,
2) запасы, имеющиеся в пунктах отправления,
3) заявки, поданные пунктами назначения,
4) стоимости перевозок из каждого пункта отправления в каждый пункт назначения.
Стоимости перевозок помещают в правом верхнем углу каждой ячейки, с тем чтобы в самой ячейке при составлении плана помещать перевозки x i j .
Образец заполнения транспортной таблицы
Таблица 3.1
| пн по\ | B1 | B2 | Bn | Запасы ai | |
| А1 | С11 | С12 | С1n | a1 | |
| А2 | с21 | с22 | с2n | a2 | |
| ……………… | ……………… | …………………………. | ………………………… | ……………………. | |
| Аm | сm1 | сm2 | сmn | a m | |
| Заявки | b1 | b2 | bn | ∑ai = ∑bJ |
Поскольку ранг системы уравнений-ограничений ТЗ равен r = n + m – 1, где
m – число строк, а n – число столбцов, следует утверждать, что в каждом опорном плане, включая и оптимальный, будут отличны от пуля не более чем r = n + m – 1 перевозок.
Ячейки (клетки) таблицы, в которых записываются отличные от нуля перевозки,
Называют базисными, а остальные (пустые) свободными.
|
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 444; Нарушение авторских прав?; Мы поможем в написании вашей работы!