КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Рабочее место — это часть рабочего пространства, в котором располагается оборудование, с которым непосредственно взаимодействует человек в рабочей среде
|
|
|
|
Рабочее место оператора в общем случае включает в себя пульты управления с соответствующими средствами отображения информации и органами управления, средства связи и поддержки деятельности.
По ГОСТ 26.387-84 Рабочее место оператора — «это часть пространства в системе «человек — машина», оснащённая средствами отображения информации, органами управления и вспомогательным оборудованием и предназначенная для деятельности оператора СЧМ».
Пространство рабочего места, в котором осуществляется трудовой процесс, может быть разделено на рабочие зоны. Рабочая зона – это часть трехмерного пространства, в пределах которого осуществляются все трудовые действия работника.
Правильное проектирование рабочих зон определяется соответствием их с оптимальным полем зрения рабочего и определяется дугами, которые может описать рука, поворачивающаяся в плече или локте на уровне рабочей поверхности (т.е. с учетом динамических антропометрических характеристик), а движением рук управляет мозг человека в соответствии со зрительной информацией. Поэтому рабочую зону, удобную для действия обеих рук следует совмещать с зоной, охватываемой зрением.
Зона 1 – самая благоприятная, применима для точных и мелких сборочных работ (хорошо работают обе руки и осуществляется зрительный контроль).
Зоны 2 и 3 хорошо доступны для одной и мало доступны для другой руки; зрительный контроль осложнен. В этих зонах удобно размещать инструменты и материалы, которые рабочий берет правой или левой рукой или органы управления, за которыми не требуется постоянный зрительный контроль.
Зона 4 – запасная, труднодоступная зона; в ней могут быть размещены инструменты и материалы, котоые не поместились в зонах 1 и 2.
|
|
|
Зона 5 (зона 6) доступна только для правой (левой) руки. В ней можно разместить инструменты и материалы, которые употребляются изредка или органы управления, которыми пользуются «не глядя».
В соответствии с рабочими зонами и антропометрическими данными проектируются рабочие места в любом производственном процессе и любые машины и механизмы, обслуживаемые человеком.
Вопрос 30. Эргономические параметры рабочего места
Параметры рабочих мест и их элементов, при расчетах которых используются антропометрические данные, условно делятся на три группы.
1. Габаритные параметры рабочего места характеризуют предельные размеры его внешних очертаний. Габаритный объем-рабочего места определяется как сумма объемов, занятых основным производственным оборудованием, организационной и технологической оснасткой, проходами и подходами к основным элементам рабочего места и т. д., а также объема мертвого пространства, создаваемого неправильными формами перечисленных объектов. Различают габаритные параметры рабочего места в целом (высота, ширина, глубина) и габаритные параметры его элементов.
2. Свободные (несопряженные) параметры — это параметры отдельных элементов рабочего места, которые не имеют общих баз отсчета, а, следовательно, не сопряжены друг с другом. К ним относятся параметры рабочего сиденья и его спинки, подлокотников, приводных элементов органов управления и т. п. Свободные параметры рабочего места и оборудования могут быть нерегулируемыми (постоянными) и регулируемыми (переменными). К последним относятся высота и угол наклона подставки для ног, высота сиденья, угол наклона спинки, высота спинки, подвижность спинки вперед — назад и др.
3. Компоновочные (сопряженные) параметры рабочего места, образуя размерные цепи, характеризуют положение отдельных элементов рабочего места относительно друг друга и по отношению к работающему человеку.
|
|
|
Компоновочные параметры обеспечивают возможность работающему совершать движения в оптимальном диапазоне, позволяют увязать все элементы рабочего места в систему с едиными базами отсчета.
К компоновочным параметрам рабочего места для выполнения работы в положении стоя относятся параметры рабочей поверхности, подставки для ног, пространства для стоп, проходы, досягаемость в моторном пространстве.
Для положения сидя используются параметры рабочей поверхности, сиденья и его подвижности, диапазон и шаг угла наклона и подвижности спинки (вперед — назад), подставки для ног, пространства для ног и т. д.
Компоновочными (сопряженными) параметрами для органов управления — кнопок, клавиш, педалей, рычагов, переключателей, маховиков и т. д. являются расстояния между краями соседних элементов, углы поворота без перехвата, размахи движения и т. п.
Компоновочные параметры, как и свободные, могут быть нерегулируемыми (постоянными) и регулируемыми (переменными). Регулировать компоновочные параметры можно опосредованно, путем регулирования свободных параметров некоторых подвижных элементов рабочего места (сиденья, педали, подставки для ног) относительно работающего.
Вопрос 31. Антропометрические и физиологические требования к рабочему месту
Соответствие организации рабочего места антропометрическим и физиологическим данным человека способствует рациональному взаимодействию между человеком и орудием труда и приводит к повышению работоспособности и эффективности трудовой деятельности.
Рабочее место должно обеспечивать возможность удобного выполнения работ, в положении сидя, стоя или сидя и стоя. Рабочая поза определяется условиями трудового процесса и конструкцией производственного оборудования с учетом физиологической тяжести работ, размеров рабочей зоны и необходимости передвижения в процессе выполнения работ. Так, медленные и точные движения, требующие статических усилий мышц, целесообразно выполнять в положении сидя, а быстрые, со значительными траекториями — в положении стоя.
Конструкция оборудования и рабочего места, их размеры и взаимное расположение элементов (пультов, органов управления, кресла) должны учитывать требуемую точность и скорость движений при осуществлении управления, частоту использования органов управления, допустимые динамические и статические нагрузки, антропометрические характеристики двигательного аппарата человека, возможность различения органов управления.
|
|
|
Как помним из лекции 4, трудовые движения в порядке возрастания их сложности, напряженности, возможной утомляемости подразделяются на пять групп:
- движения пальцев;
- движения пальцев и запястья;
- движения пальцев, запястья и предплечья;
- движения пальцев, запястья, предплечья и плеча;
- движение пальцев, запястья, предплечья, плеча и корпуса.
Приконструировании оборудования и трудовых процессов, выбореорганов управления и их размещении в рабочей зоне стремиться к ограничению трудовых движений первыми тремягруппами и учитывать физиологические особенности двигательного аппарата человека:
- скорость движения рук больше при движении в направлении «к себе», меньше — при движении «от себя»;
- скорость движения правой руки больше при движении слева направо, левой руки — справа налево;
- линейная скорость вращательных движений рук больше скорости поступательных движений;
- скорость плавных криволинейных движений рук больше скорости прямолинейных движений рук с резким изменением направления;
- точность движения рук больше при работе в положении сидя, меньше — при работе в положении стоя;
- точность движений рук больше при небольших (до 10 Н) нагрузках;
- точность движений, совершаемых пальцами рук, больше точности движений кистью;
- наибольшая точность движений, совершаемых пальцами рук, достигается в горизонтальной плоскости при положении рук, согнутых в локтевом суставе на 50...60° и в плечевом суставе — на 30...40°;
- усилие мышечных групп мужчин: большого пальца руки — 119; запястья -234...279; предплечья — 279; плеча — 386; корпуса — 1 231 Н;
- максимальное усилие, развиваемое правой (рабочей) рукой, на 10...15% больше максимального усилия, развиваемого левой рукой;
|
|
|
- усилия давления и тяги, развиваемые руками при движении их перед корпусом, больше, чем при движении рук в стороны;
- максимальное усилие, развиваемое стопой ноги, в положении сидя, достигается, если угол между голенью и бедром составляет 95.. 120°;
- максимальное усилие при движении ноги достигается в положении сидя при наличии упора для спины;
- скорость и частота движений, совершаемых стопой ноги, больше в положении сидя, чем в положении стоя.
Усилия, необходимые для осуществления управляющих действий устанавливаются с учетом способа перемещения органа управления (пальцами, кистью с предплечьем, всей рукой, стопой и так далее), частоты использования и в некоторых случаях с учетом продолжительности непрерывного воздействия на органы управления, скорости выполнения управляющего действия и положения человека в процессе управления.
Вопрос 32. Эргономическое проектирование рабочих мест: понятие, задачи, этапы, эргономические требования
Эргономическое проектирование рабочих мест производится с учетом антропологических, биомеханических, психофизиологических и психических возможностей работников.
При этом решаются следующие задачи:
1. размещение работающего человека с учётом зоны его рабочих движений, выполнения основных и вспомогательных операций в удобном рабочем положении, с применением эффективных приёмов и способов выполнения трудовых операций, оптимального обзора средств визуального и звукового представления информации.
2. обеспечение свободного доступа к оборудованию для его профилактического осмотра и ремонта.
3. обеспечение требований санитарной гигиены, техники безопасного проведения работ.
Эргономическое обеспечение проектирования рабочего места включает этапы:
1. Формирование исходных данных.
2. Предварительный выбор габаритов рабочего места.
3. Выбор правил компоновки средств отображения информации и органов управления. Разработка варианта их размещения на панелях рабочего места.
4. Оценка размещения элементов рабочего стола (обзорность, досягаемость элементов рабочего места).
5. Учёт общих эргономических требований по компоновке панелей пультов.
6. Комплексная оценка конструкции рабочего места.
7. Выбор форм цветового кодирования информации на индикаторах пульта.
8. Разработка окончательного варианта размещения элементов рабочего пульта.
Соответствие параметров рабочего места размерам моторного пространства, антропометрическим данным человека, удобству его рабочей позы, рациональным и эффективным рабочим движениям способствует снижению величины статистической и динамической нагрузок при работе, уменьшению вероятности возникновения заболеваний (остеохондроз, радикулит и т. д.) и позволяет сохранить высокую и устойчивую работоспособность и производительность труда.
К факторам, определяющим организацию и проектирование рабочего места, относятся
- приемы труда,
- положение тела,
- рабочая поза,
- рабочие движения,
- максимальный темп движений,
- зоны деятельности.
Приемы труда. При проектировании методов работы следует использовать, принципы экономии движений.
Положение тела влияет на пространственную компоновку рабочего места, величину усилий на органы управления, параметры обзорности.
Наиболее распространены положения, стоя и сидя, реже — лежа. Каждое положение характеризуется определенными условиями равновесия, степенью напряжения мышц, состоянием дыхательной и кровеносной системы, расходом энергии и т. д. Так, положение стоя характеризуется неустойчивым равновесием, но в то же время ему свойственно более естественное состояние позвоночного столба и грудной клетки, хорошие условия для зрительного обзора и перемещения. Однако оно более утомительно по сравнению с другими положениями, так как требует значительной работы мышц по удержанию равновесия тела. Поэтому в положении стоя следует избегать фиксированных поз, рекомендуется делать перерывы для отдыха в положении сидя.
Рабочая поза. Термин «рабочая поза» обозначает наиболее частое и предпочтительное взаиморасположение звеньев тела при выполнении трудовых операций. Сохранение той или иной позы происходит при активном участии нервно-мышечной системы, состояние которой характеризуется, прежде всего величиной тонуса, суставных углов и т. п. В процессе проектирования алгоритмов трудовой деятельности, в выполнении которых преобладают моторные компоненты и требуется длительное поддержание определенной рабочей позы, особое внимание следует уделять проектированию оптимальной рабочей позы и условий ее поддержания. При этом следует исходить из положения, что наиболее вредным является не столько сама поза, сколько время, в течение которого человек в ней находится. Оптимальная рабочая поза должна служить исходным моментом при расчетах размеров досягаемости для рук и ног в пределах моторного пространства.
Рабочие движения. В каждом рабочем движении выделяются четыре формы: механическая, физиологическая, психическая и функциональная.
Механическая форма рабочих движений определяется следующими параметрами: пространственными (длиной, формой, направлением); временными (скоростью, ускорением, темпом); силовыми (направлением и величиной усилий) и точностными (во времени, пространстве и т. п.).
Физиологические рабочие движения обеспечиваются двумя простейшими формами мышечной активности: динамической (собственно движение) и статической (поддержание рабочей позы). В конкретных рабочих ситуациях двигательная деятельность более сложна, так как она включает элементы статики и динамики в качественных различных и количественных соотношениях и координациях движения.
Психические формы рабочих движений классифицируются по функциям в трудовом процессе, по решаемой в движении задаче, по степени контроля за выполнением движений.
Функциональная форма рабочих движений означает деление всего комплекса движений в рабочем процессе на основные и вспомогательные.
Максимальный темп движений. Он зависит от типа движения: вращательного (об/с); нажимного для ведущей и не ведущей руки (наж/с); ударного для среднего и оптимального темпа (уд/с) и от усилий, развиваемых при различных движениях и точности движений рук.
Зоны досягаемости. Различают зоны максимальной, оптимальной и легкой досягаемости. При организации рабочего места необходимо обеспечить выполнение трудовых операций в пределах зоны максимальной досягаемости моторного поля, а операций «часто» выполняемых (менее двух операций в минуту) и «очень часто» — в пределах зоны легкой досягаемости и оптимальной зоны моторного поля. В положении сидя зоны досягаемости определяются при выпрямленном и фиксированном относительно спинки стула корпуса, а испытуемый описывает выпрямленной правой и левой рукой дуги в вертикальной или горизонтальной плоскости.
Площадь, ограниченная дугой, и является зоной досягаемости данной руки.
С учетом факторов, определяющих организацию рабочего места, производится расчет его параметров.
Параметры рабочего места измеряются в различных положениях тела (стоя, лежа, сидя) и позах (руки вытянуты в стороны, вверх и т. д.), имитирующих рабочие позы и движения. При измерении этих параметров в качестве баз отсчета чаще всего используются ограничительные плоскости. Эргономические антропометрические, параметры по способам измерений и в зависимости от сферы использования делятся на статические и динамические.
Статические антропометрические признаки — это размеры тела, измеренные однократно в статическом положении испытуемого. Условность и сохранение постоянства позы обеспечивают идентичность измерений. Эти признаки используются для расчета свободных (несопряженных) параметров элементов рабочих мест, для определения диапазона регулирования изменяемых параметров, конструирования манекенов, создания математических моделей тела человека.
К динамическим антропометрическим признакам относятся размеры тела, изменяющие свою величину при угловых и линейных перемещениях измеряемой части тела в пространстве. Линейные изменения могут выражаться в абсолютных величинах и в виде приростов (эффект движения тела). Динамические антропометрические признаки используются для определения: амплитуды рабочих движений; величины рабочих перемещений приводных элементов органов управления; размеров зон моторного пространства.
В основу общих правил использования антропометрических данных при расчете параметров рабочих мест и производственного оборудования положен метод перцентилей.
Перцентиль — сотая доля объема всей совокупности людей, подвергавшихся антропометрическим исследованиям.
Если площадь, ограниченную кривой распределения, или всю совокупность наблюдений разделить на 100 равных частей, то получим 99 перцентилей (Р1..... Р99) (рис. 7-4).
Каждый перцентиль имеет свой порядковый номер; 1-й перцентиль отсекает в распределении частоты наименьших значений антропометрического признака, составляющие 1% от суммы всех частей; 2-й перцентиль — значения, составляющие 2%, и т.д.; 50-й перцентиль в нормальном распределении соответствует средней арифметической величине. Средняя величина признака — это та, ниже которой оказывается около половины населения. Если бы размеры дверей соответствовали только средним размерам тела человека, то 50% посетителей общественных зданий разбивали бы свои лбы о притолку.
Числовые значения антропометрического признака, соответствующие верхней или нижней границе выбранного объема работающих, называются пороговыми. Они являются антропологическими критериями при расчете параметров рабочих мест на основе метода перцентилей.
При использовании антропометрических данных необходимо:
- учитывать количество регулируемых параметров производственного оборудования и рабочих мест;
- помнить о том, что наибольшие различия в размерах тела — индивидуальные (внутригрупповые), а затем межгрупповые (половые, национальные, возрастные);
- рассчитывать требуемый минимум свободного пространства для размещения тела человека или его перемещения, исходя из антропометрических данных людей, характеризующихся наибольшими продольными, поперечными и передне-задними размерами тела;
- рассчитывать те части рабочего пространства, которые связаны с различными видами досягаемости, на основе антропометрических данных людей, характеризующихся наименьшими продольными, поперечными и передне-задними размерами тела;
- помнить, что люди отличаются друг от друга не только общими размерами тела, но и соотношениями этих размеров;
- использовать базы отсчета, которые соотносятся с базами, взятыми при измерении размеров тела, и не требуют сложных перерасчетов;
- округлять цифровые значения антропометрических данных, заимствованные из таблиц, но не более чем на
- 1 см или 1 градус.
При использовании антропометрических данных не рекомендуется:
- рассчитывать параметры оборудования и рабочих мест на основе только средних арифметических значений антропометрических признаков;
- пользоваться антропометрическими данными 20-25-летней давности;
- пользоваться источниками (справочники, монографии и т.п.), в которых не указаны год сбора материала, пол, возраст и национальность контингента исследуемых, численность группы населения;
- использовать размеры тела, измеренные в положении стоя, при расчетах параметров рабочих мест, предназначенных для работы сидя;
- получать основные эргономические размеры путем сложения отдельных классических размеров;
- выделять основные и второстепенные антропометрические признаки; следует считать все множество антропометрических признаков одинаково необходимым, выявляя их значимость только при анализе конкретных объектов производственного оборудования.
При расчете компоновочных параметров рабочих мест на основе антропометрических данных следует различать базы отсчета, используемые при измерении эргономических признаков и расчете компоновочных параметров рабочего места. Эти базы должны совпадать или не противоречить друг другу.
При измерении многих антропометрических признаков в качестве баз отсчета используют следующие ограничительные плоскости:
1) в положении стоя: плоскость пола (горизонтальная плоскость для измерения высот точек над полом); стенку стенда (вертикальная плоскость для измерения передне-задних и поперечных размеров тела);
2) в положении сидя: плоскость пола; плоскость сиденья; спинку сиденья, перпендикулярную заднему краю сиденья.
Расчеты и измерения компоновочных параметров рабочих мест следует проводить в ортогональной системе координат с внешней относительно тела человека базой отсчета. Преимущество этой системы по сравнению с внутренней (на теле человека) — в отсутствии погрешностей в установлении нулевой точки отсчета (пол, край оборудования, воображаемые линии, плоскости и т.п.), так как она фиксирована неподвижно. Имеется лишь погрешность при нахождении конечной точки.
Вопрос 33. Общие правила расчета параметров рабочих мест
Общие правила расчета параметров рабочих мест состоят в следующем:
1. Определяют характер контингента работающих, для которых предназначено рабочее место и проектируемое оборудование (мужчины или женщины, национальность, возраст и т. д.).
2. Определяют объем (в %) совокупности работающих, размерам тела которых должно соответствовать проектируемое оборудование, а затем его верхнюю и нижнюю границу. Если устанавливают, например, размеры рабочего места водителя трактора, то они должны обеспечивать легкость и удобство эксплуатации для 90—95% работающих. Одновременно учитывают, что для группы людей, которые могут принадлежать к этой профессии, минимальной (нижней) и максимальной (верхней) границами распределения, включающими 90% численности работающих, являются 5-й и 95-й перцентили. При этом остаются неудовлетворенные 5% работающих с наибольшими и 5% с наименьшими размерами тела (рис. 3).
Минимальные и максимальные границы 95%-ного объема будут ограничены или 5-м перцентилем, с одной стороны, или 95-м — с другой для соответствующих групп населения. Эти границы используют для расчета нерегулируемых параметров рабочих мест. В первом случае остаются неудовлетворенными 5% работающих с наименьшими размерами тела; во втором случае — 5% работающих с наибольшими размерами тела (рис. 4). Выбор границ связан с конкретными параметрами оборудования.
3. Выбирают антропометрический признак, который будет служить основой для расчетов тех или иных параметров рабочего места, будет учитывать функциональное значение параметра производственного оборудования, рабочее положение тела работающего и позы, пол, возраст, национальность и т. д.
4. Выбирают границы (верхнюю или нижнюю) объема обследуемой совокупности работающих, достаточные для надежного определения параметра рабочего места.
5. При расчете различных параметров оборудования и рабочих мест используют пороговые значения антропометрических признаков, соответствующих верхней и нижней границе или обеим одновременно выбранного объема численности обследуемых работающих — чаще 5 или 95 — перцентилям. Так, большинство нерегулируемых параметров рабочих мест по высоте рассчитывают исходя из значений антропометрических признаков, соответствующих 95-му перцентилю той группы работающих, у которой используемый для расчетов размер тела имеет наибольшее значение и т. д.
6. Находят числовое выражение порогового значения антропометрического признака, характерного для выборочной совокупности. Числовые значения антропометрических признаков, соответствующие 1, 5, 50, 95, 99-му перцентилям, приводятся в антропометрических атласах и нормативных документах.
7. За базы отсчета при измерении габаритных параметров рабочего места в целом принимают воображаемые ограничительные плоскости, касательные к наиболее выступающим внутрь свободного рабочего пространства точкам элементов рабочего места, ограничивающим размах движений и проходов (органы управления, щиток и т.
8. Измерения и расчеты компоновочных параметров следует проводить, различая среди них следующие группы: параметры досягаемости в моторном пространстве; высота рабочей поверхности, сиденья и подставки для ног и их соотношения; параметры группирования органов управления на панелях пультов, щитков, параметры проходов и т. п. Так, базами отсчета для определения оптимальных расстояний между приводными элементами органов управления следует считать наиболее выступающие точки краев двух соседних приводных элементов при их нейтральном и рабочем положении и т. д.
При необходимости провести анализ пространственной компоновки рабочих мест следует опираться на методику, построенную на основании данных эргономической антропологии. Она позволяет анализировать «эргономические параметры» рабочего места, т. е. те параметры, которые рассчитываются на основе антропометрических данных. Эти данные могут не совпадать с данными в технической документации, поэтому с целью анализа параметров рабочего места значительную их часть следует измерять заново.
Анализ пространственной компоновки рабочих мест проводится в два этапа: подготовительном и основном.
На подготовительном этапе:
1. Определяют тип рабочего места.
2. Составляют перечень средств труда на рабочем месте, выделив основные и вспомогательные.
3. Составляют перечень органов управления и затем их классифицируют по группам: ручного и ножного управления, постоянного, Периодического и эпизодического действия.
4. Составляют перечень технологической оснастки, определив ее по технической документации и наличию на рабочем месте.
5. Составляют перечень организационной оснастки.
6. Определяют зоны моторной активности, выделив среди них постоянные, периодические и эпизодические.
7. Составляют перечень эргономических параметров рабочего места, подлежащих измерениям и анализу, и сводят их в таблицу.
8. Определяют базы отсчета, от которых следует измерять, компоновочные параметры рабочего места в каждой выделенной зоне.
На основном этапе:
1. Составляются эскиз рабочего места в трех проекциях: вид сверху, в профиль, спереди. На нем отражаются все элементы рабочего места и параметры, которые подлежат оценке и измерению.
2. Измеряют параметры рабочего места в составленном перечне и заносят их в таблицы и эскизы.
3. Вычерчивают чертежи рабочего места в определенном масштабе.
Число чертежей (эскизов) определяется степенью организации рабочего места и т. п.
Далее делают выводы о степени соответствия параметров рабочего места антропометрическим данным и намечают возможные пути ликвидации выявленных несоответствий.
Вопрос 34. Особенности проектирования человеко-машинных систем
Вопрос 35. Проектирование интерфейса: понятие, элементы
Интерфейс (стык, устройство сопряжения) обеспечивает взаимодействие человека с техническими средствами при приеме и оценке информации, информационной подготовке и принятии решений, исполнительных действиях и коммуникации.
Основные компоненты — это средства отображения информации (СОИ) и органы управления.
Средства отображения информации (приборы, экраны, мнемосхемы, табло и т.п.) предназначены для предъявления работающему человеку данных, характеризующих объект управления, ход технологического процесса, энергетические ресурсы, состояние средств автоматизации, каналов связи и пр. Эти данные предъявляются человеку в количественной и качественной форме.
Органы управления (кнопки, клавиши, рычажные и поворотные переключатели, маховики, педали и т.п.) предназначены для передачи управляющих воздействий от работающего человека к производственному оборудованию и играют роль связующего звена между ними. С их помощью осуществляются ввод информации, ее вызов на СОИ, приведение в действие исполнительных органов объекта управления (подгонка резца, подъем ковша экскаватора и т.п.).
В тех рабочих системах, в которых операторы управтляют машинами, используя СОИ в качестве основного источника информации, они действуют с информационными моделями. Будучи средством деятельности операторов, информационные модели нередко становятся и ее предметом.
Органы управления (кнопки и клавиши, тумблеры, поворотные ручки, маховики, вращающиеся переключатели, ножные педали) и средства отображения информации размещаются на пультах и панелях. Они должны обеспечивать удобное и достаточное по размерам рабочее пространство для операторов, свободный подход их к месту, место для ведения записей, просмотра и хранения текущей информации (при необходимости).
При любых видах работы с информацией всегда идет речь о ее представлении в виде определенных символических структур. Формирование представления информации — это ее кодирование.
Оптимальность кода предполагает обеспечение максимальной скорости и надежности приема и переработки информации человеком, т.е. максимальной эффективности выполнения операций зрительного поиска, обнаружения, различения, идентификации и опознания сигналов.
Существует ряд относительно независимых параметров, по которым должны строиться и оцениваться алфавиты кодовых сигналов:
1. модальность сигнала - модальность (от лат. modus — способ) означает выбор способа кодирования информации с учетом того, каким анализатором она будет лучше восприниматься;
2. вид алфавита (категория кода) - различные качественные и количественные характеристики управляемых объектов кодируются разными способами: условными знаками, буквами, цифрами, цветом, яркостью и т.п. Каждый способ кодирования называется видом алфавита, или категорией кодирования. Буквы используются для передачи информации о названии объекта, цифры — о его количественных характеристиках, цвет — о значимости. Геометрические фигуры могут быть использованы для кодирования информации в тех случаях, когда оператору необходима наглядная картина для быстрой переработки информации.
3. длина алфавита (основание кода) - Общий диапазон абсолютно различаемых градаций одномерного сигнала колеблется от 4 до 16 в зависимости от качества используемого признака. Допустимая длина алфавита должна определяться экспериментальным путем для каждого вида алфавита.;
4. мерность кода - Наиболее целесообразным способом увеличения длины кодового алфавита является многомерное кодирование, т.е. увеличение числа значимых и меняющихся параметров сигнала. При использовании многомерных сигналов необходимо определять оптимальное соотношение числа переменных параметров сигнала и числа градаций каждого из параметров.;
5. мера абстрактности кода - Существуют два варианта: абстрактный код, не связанный с содержанием сообщения, и конкретный код, в определенной мере связанный с содержанием сообщения. Конкретность, наглядность опознавательных признаков знака ускоряют процесс декодирования, поскольку в этом случае процессы различения, опознания и декодирования осуществляются одновременно.
6. компоновка кодового знака и группы – основные требования: четкая и последовательная классификация символов внутри алфавита; основной классификационный признак объекта кодируется контуром знака, который должен представлять собой замкнутую фигуру; дополнительные детали не должны пересекать или искажать основной символ; не следует перегружать знак внутренними или наружными деталями.
Вопрос 36. Эргономическое проектирование средств отображения информации
Для восприятия и обобщения информации оператору необходимы технические устройства, называемые средствами отображения информации.
Основные требования к СОИ:

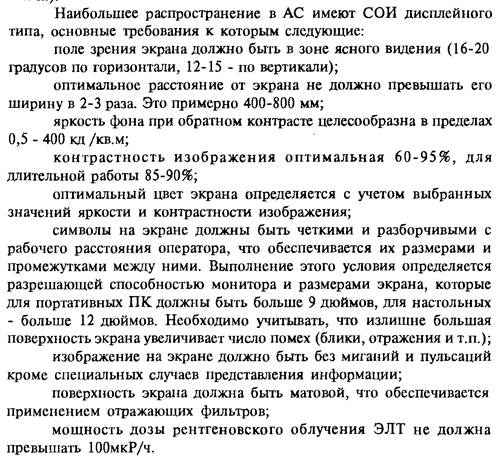
Важную роль при проектировании СОИ играют вид предъявляемой информации, методы и формы кодирования и пространственного расположения.
При цветовом кодировании необходимо учитывать эмоциональную значимость цвета, что часто применяют при передаче сигналов об опасности. Так, по международному стандарту сигналами опасности являются тёплые тона, безопасности — холодные. Степень опасности обозначается разным цветом. Красный — требование остановки действий, оранжевый — предупреждение о серьёзной опасности, жёлтый — «Внимание! Осторожно!», зелёный — отсутствие опасности, голубой — предупреждение, чтобы оператор не начинал действия. Кроме того, мигающий красный цвет обозначает ситуацию, требующую немедленных действий.
Цветовой код может быть полезен в случаях:
— если дисплей не разграфлён;
— высока плотность символов;
— оператор вынужден отыскивать информацию в большом массиве данных.
Цветом лучше кодировать целые слова или фон, чем символы или отдельные знаки.
Поскольку периферия сетчатки глаза не чувствительна к зелёному и красному цветам, их не следует применять на краях дисплея. Жёлтый и синий — хорошие периферийные цвета, хотя синий не следует использовать для знаков и тонких линий. Пары дополнительных цветов, например, красный — зелёный и жёлтый — синий представляют собой хорошие комбинации для цветного дисплея.
Для мелких деталей изображения не следует применять насыщенный синий цвет. Синий цвет хорошо использовать для фона.
Улучшению восприятия зрительной информации способствуют следующие свойства и способы её организации:
- заметность — сообщение должно привлекать внимание и располагаться в зоне наблюдения оператора. На внимание влияют заметность, новизна и релевантность (полезность) знака;
- выделение — наиболее важные слова могут быть подчёркнуты, усилены путём увеличенного размера или штриховки;
- чёткость — может быть усилена при увеличении контраста знаков по отношению к фону, введении шрифта с хорошей разборчивостью;
- вразумительность — необходимо дать ясно понять, в чём состоит опасность и что может произойти, если предупреждение будет проигнорировано. Сообщения должны быть предельно краткими, в форме точной инструкции к действию;
- видимость — знаки должны быть видимыми при любых условиях рабочего освещения;
- стандартность — целесообразно применять стандартные слова и символы.
Большую роль при восприятии текстовой информации на дисплее играет рисунок шрифта букв и цифр. Отношение толщины штриха к высоте букв должно быть от 1:6 до 1:8 для чёрных букв на белом фоне и от 1:8 до 1:10 для белых букв на чёрном фоне.
Высота букв и цифр зависит от расстояния наблюдения, окружающего освещения и важности сообщения.
Например, при расстоянии 35 см рекомендуемая высота букв составляет 2,3 мм для малозначимой и 4,3 мм для важной информации.
Зрительная информация должна располагаться в зоне прямого видения, причём главная информация — в центре, а второстепенная и справочная — на периферии.
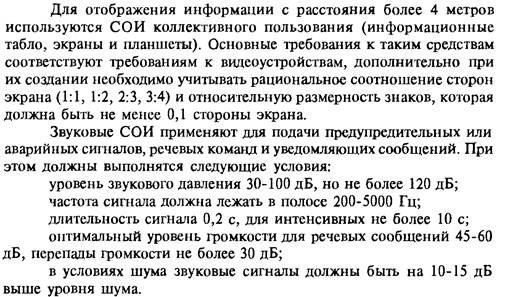
Слуховые средства предъявления информации используются наряду со зрительными средствами в случаях:
- если сообщение простое;
- сообщение краткое;
- к сообщению не требуется возвращаться в дальнейшем;
- сообщение отображает события, распределённые во времени;
- сообщение призывает к немедленному действию;
- зрительная система оператора перегружена;
- работа оператора требует частых перемещений в рабочем пространстве.
При выборе предупреждающих звуковых сигналов необходимо учитывать:
- высоту сигнала, которую следует выбирать из диапазона 150-1000 Гц;
- сигналы должны иметь гармонические частотные компоненты;
- сигналы должны иметь не менее четырёх выраженных частотных компонент, что снижает риск маскировки другими сигналами;
- целесообразно введение модуляции основной частоты: это привлекает внимание оператора.
Необходимо предупредить резкое нарастание сигнала, так как это воспринимается как удар, сопровождаясь звуковым шоком. В сигнале не должно быть дребезга и звона. Во многих случаях для привлечения внимания и пространственной ориентации взора оператора используется бинауральный эффект, который лучше проявляется на средних и высоких частотах звукового диапазона.
При использовании голосовых сообщений важны разборчивость и семантика речи. Различают системы с естественной и синтезируемой речью. Особенности восприятия второй зависят от типа синтезирующего устройства. Речевое сообщение предпочтительнее использовать для сообщений о нарушении нормальных условий, а сигналы — при аварийных и критических ситуациях.
Вопрос 37. Эргономическое проектирование органов управления
Органы управления представляют собой элементы интерфейса (связи) в СЧМ, с помощью которых оператор передаёт механическую энергию или информацию технической части системы для выполнения автоматических функций управления.
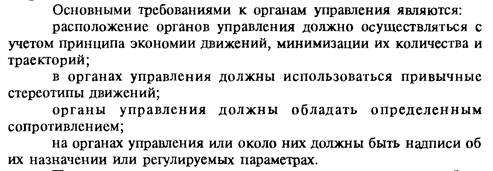
Организация, отбор и размещение органов управления осуществляются с учётом анатомических, антропометрических, биомеханических и физиологических характеристик человека.
Основные органы управления – это кнопки, клавиши, тумблеры, переключатели, маховики и штурвалы, ножные педали.
Кнопочные и клавишные переключатели применяют для осуществления операций быстрого включения и выключения аппаратуры, выбора нужного параметра, набора и ввода логической и количественной информации и команд управления. Кнопочный переключатель срабатывает от осевого перемещения привода в виде кнопки, а клавишный переключатель — от перемещения (вращения) клавиши вокруг смещенной оси. Расположение кнопочных и клавишных переключателей по высоте должно находиться на уровне локтя сидящего человека при горизонтальном расположении предплечья и согнутой под углом 90° в локтевом суставе руки. Рациональный угол наклона панели клавиатуры равен 15°. Располагают кнопки и клавиши в ряд горизонтально с расстоянием между кромками кнопок не менее 5 мм, а в особых случаях и вертикально с использованием функционально-цветового кодирования.
Для сокращения времени ввода управляющих воздействий кнопочные, и клавишные переключатели выполняются с обратной связью. Это свойство выключателя, заключающееся в том, что в момент приведения в действие его подвижная система оказывает упругое сопротивление пальцу или кисти руки человека, а после завершения действия сигнализирует о вводе информации механически (тактильному анализатору) резким падением упругого сопротивления, акустически (слуховому анализатору) — «щелчком», или визуально (зрительному анализатору) — световым сигналом. Для уменьшения информационной загрузки зрительного анализатора оператора целесообразно организовывать обратную связь механическими или акустическими способами.
Рычажные переключатели (тумблеры) применяются для быстрого включения, выключения и переключения режимов работы, не требуют при управлении больших физических усилий, хорошо опознаются на рабочем месте, позволяют осуществлять операции с большой скоростью.
Расстояние между приводными элементами соседних тумблеров должно быть не менее 20, а при одновременном действии несколькими пальцами — 16 мм.
Форма приводного элемента (рычажной части) тумблера может быть конусообразной, многогранной или цилиндрической с расширением на конце в виде шарика или лопатки. При кодировании тумблеров их форму можно изменять, однако не должно быть острых кромок и граней.
На приводном элементе тумблера не допускаются плоские грани с радиусом перехода менее 0,2 мм — для тумблеров легкого типа и менее 0,5 мм — для тумблеров тяжелого типа. Приводной элемент тумблера должен иметь длину не менее 10- 15 мм и толщину в расширенном участке 3 — 5 мм. Межпозиционные перемещения рычажка должны выполняться в секторе 40 — 60 градусов — для двухпозиционного тумблера и в секторе 30 — 50 градусов — для трехпозиционного.
Положение тумблера, характеризующее его состояние, должно легко распознаваться визуально, тактильно и на слух (как щелчок). Позиция приводного элемента "верх" должна соответствовать состоянию "включено", "низ"— состоянию "выключено". Тумблеры легкого типа должны рассчитываться на усилия до 7 Н, тяжелого — на усилия 7 - 25 Н.
Поворотные выключатели и переключатели предназначены для плавной или ступенчатой регулировки или переключения, когда необходимо получить более трех положений.
Ручкам, рассчитываемым на точную регулировку, необходимо обеспечить диапазон поворотов на 30—60 градусов в каждую сторону от нулевой точки, а у рассчитываемых на большое усилие боковые поверхности должны быть ребристыми для обеспечения надежного захвата.
Расстояние между краями соседних ручек при работе пальцами должно составлять не менее 20 мм, при работе в перчатках — не менее 25 мм, при работе кистью — не менее 50 мм, при работе двумя руками — не менее 70 мм.
В граничных положениях выключатели должны иметь стопорные фиксаторы. При прохождении нулевого положения целесообразно предусмотреть обратную связь путем увеличения усилия вращения не более чем на 10% от основного. Для опознания ручек тактильным анализатором (прикосновением) их формы должны различаться между собой.
Маховики и штурвалы применяются для медленного вращения и точного поворота или перемещения части орудия труда (суппорта, инструмента) при значительных усилиях на оси (более 100 Н). Центр маховика располагается на высоте 230 мм от поверхности сидения или высоте 900...1050 мм от пола при работе в положении стоя. Для получения информации о перемещении маховиков и штурвалов они снабжаются указателем или счетчиком числа оборотов.
Ножные педали используют при больших усилиях и небольшой точности ввода управляющих воздействий, а также для сокращения времени управления и уменьшения нагрузки на руки.
При большом количестве органов управления используют методы группировки, учитывая при этом частоту обращения к тем или иным приборам во время выполнения рабочего алгоритма.
Часто используемые органы управления и индикации следует помещать в центральной зоне, редко — на периферии. В центральной зоне также располагают аварийные средства отображения и управления, обеспечить пространственное и функциональное соответствие между органами управления и дисплеями. Необходимо выдерживать дистанцию между определёнными типами органов управления и индикации для уменьшения явлений интерференции и перепутывания.
Вопрос 38. Интерфейс «человек-компьютер
|
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 2039; Нарушение авторских прав?; Мы поможем в написании вашей работы!