КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Автономные электрогидравлические рулевые приводы (электрогидростатические приводы)
|
|
|
|
Как показывают проведенные оценки, наиболее перспективным типом привода для использования в первичной системе управления, который может удовлетворить приведенным выше требованиям, является так называемый электрогидростатический привод (ЭГСП) на базе регулируемого вентильного электродвигателя и гидравлического насоса с постоянным наклоном шайбы для запитки силовых цилиндров.
Принцип действия ЭГСП проиллюстрирован на Рис. 8. В таком приводе скорость движения штока пропорциональна расходу гидросмеси, производимому насосом, т.е. объему гидросмеси, закачиваемому насосом в силовой гидроцилиндр в единицу времени (поэтому такой привод иногда называют приводом объемного регулирования). Для используемого в данной схеме плунжерного насоса с постоянным наклоном шайбы расход гидросмеси (и его направление) пропорционален скорости (и направлению) вращения вентильного электродвигателя, которая задается командным сигналом с блок управляющей электроники. Для обеспечения следящего режима работы этот командный сигнал, как и в ЭГРП, формируется пропорционально разнице между входным сигналом на привод и сигналом обратной связи с датчика положения штока привода. Для улучшения динамических характеристик привода, как замкнутой автоматической системы, возможно введение корректирующих фильтров и дополнительных обратных связей, например по скорости вращения вала электродвигателя.
Рис. 8 Электрогидростатический привод

 Рисунок 1.4 Электромеханические привод фирмы “Liebherr-Aerospace”
Рисунок 1.4 Электромеханические привод фирмы “Liebherr-Aerospace”
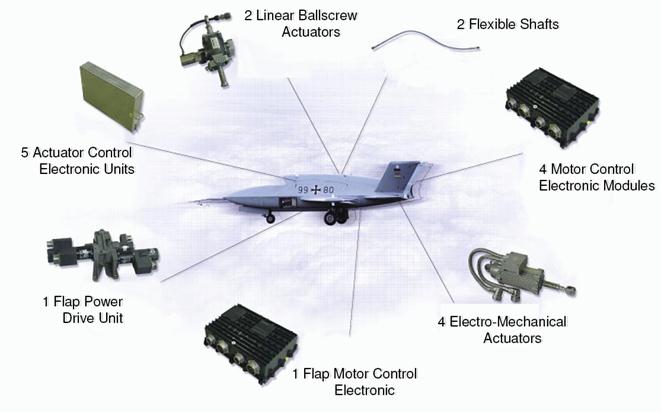
Рисунок 1.6 Разработки фирмы “Liebherr-Aerospace” для БПЛА “Barracuda”
Гидравлические электрогидростатические приводы с объёмным регулированием скорости.



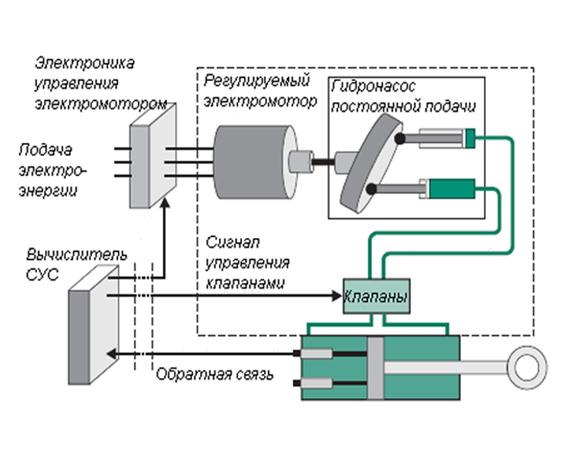
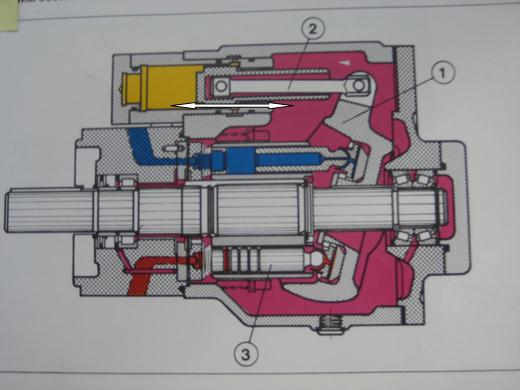
Рис. 1. Конструктивная схема типового регулируемого аксиально-поршневого насоса: 1 - наклонная шайба; 2 - шток устройства изменения угла наклона шайбы; 3 - поршни; 4 - гидрораспределитель.
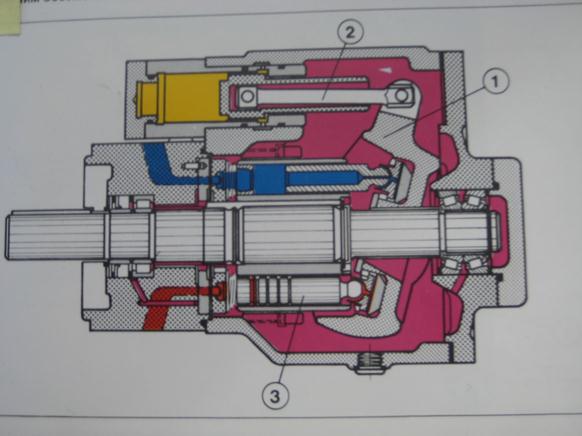 |
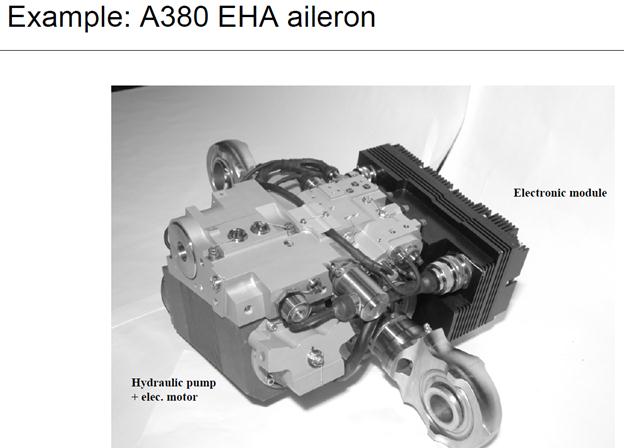
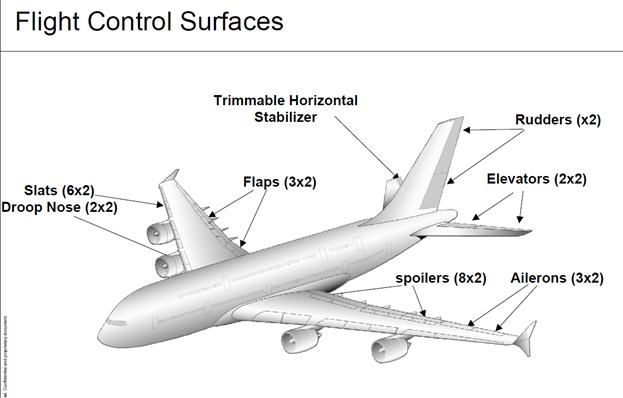



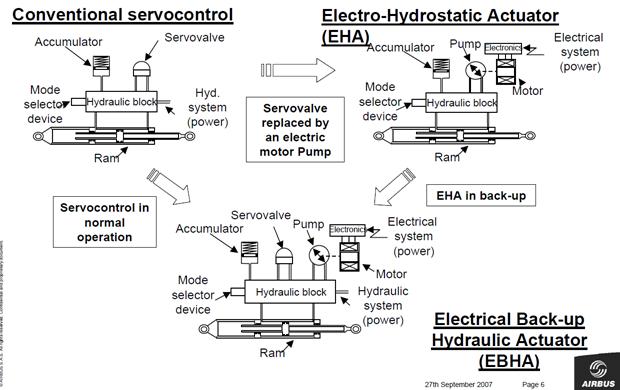
Рис.10. Внешний вид комбинированного привода фирмы LIEBHERR [8.10] для управления спойлерами самолёта А380. Здесь приняты обозначения: 1 – компенсатор; 2 – гидроцилиндр; 3 - блок клапанов; 4 – блок электроники; 5 – насос и электродвигатель.
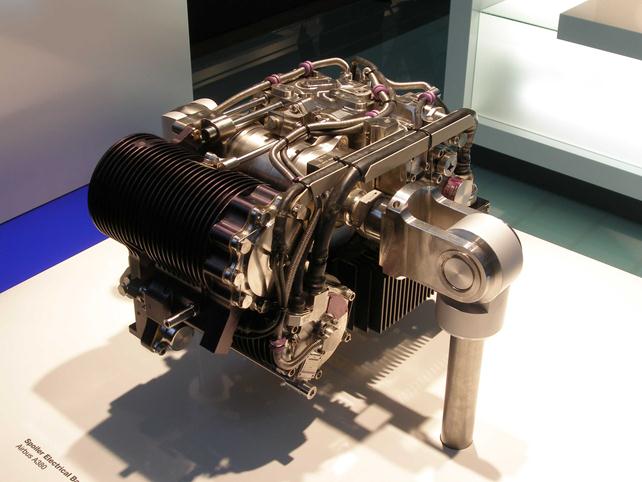
Рис. 8 Комбинированный привод фирмы “Liebherr-Aerospace”
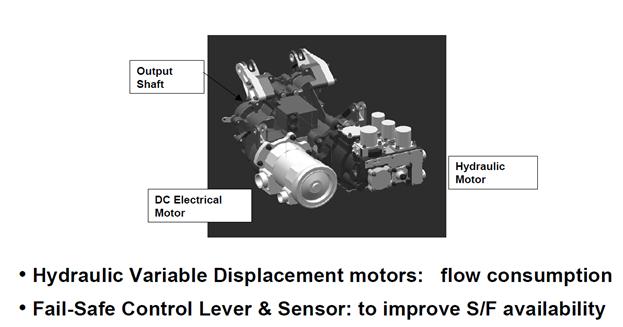

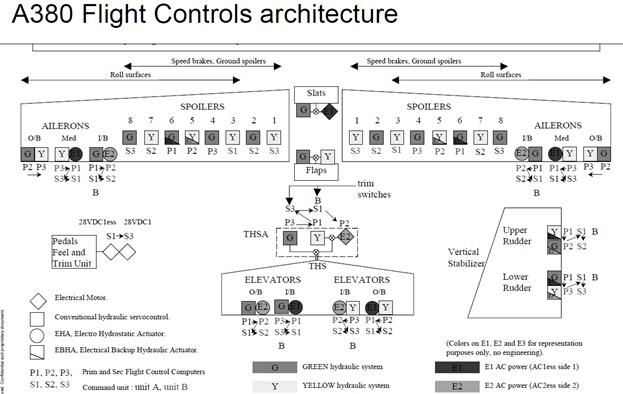

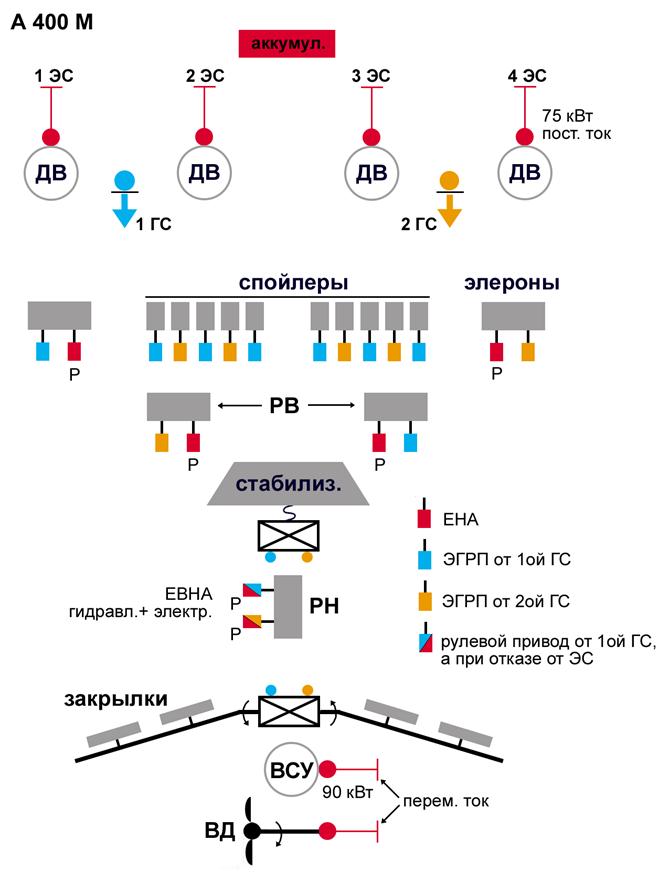
Рисунок 1.7 Исполнительная часть системы управления
“более электрического” транспортного самолета А-400М
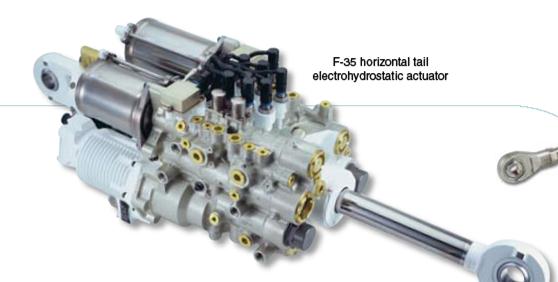
Рисунок 4. Двухканальный электрогидростатический рулевой привод (ЕНА) фирмы “Parker” для ГО самолета F-35
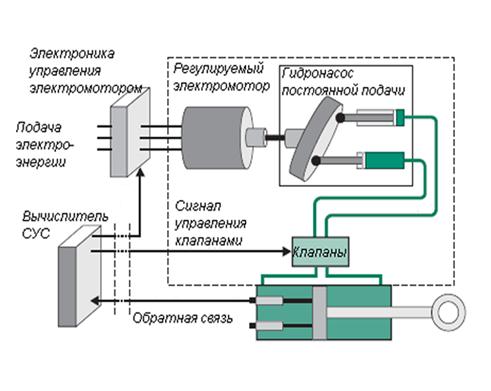
Рис. 3. Схема электрогидростатического привода
(по существу это электромеханический привод с гидростатической передачей).
Гидравлические приводы с объёмным регулированием скорости на основе регулируемых насосов.
 |
да с регулируемым рабочим объёмом насоса.
вода с насосом переменной производительности.
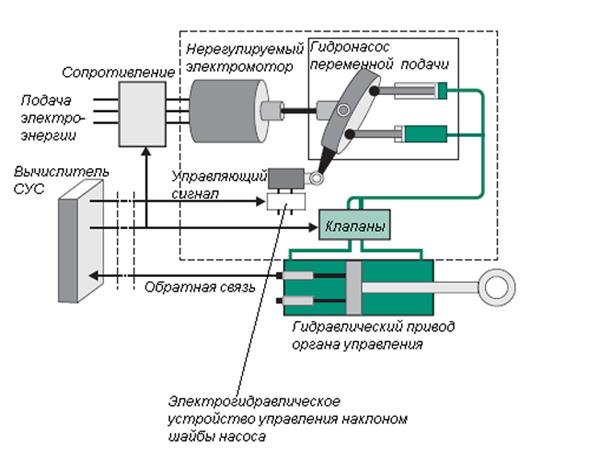
Рис. 2 Схема гидравлического привода с регулируемым рабочим объёмом насоса.
|
Рис. 8.1 Общая схема построения традиционного автономного электрогидравлического привода с насосом переменной производительн.ости
Рис.8.2.
Принципиальная схема исполнительного механизма автономного электрогидравлического привода с регулируемым объёмом гидронасоса.
Здесь приняты обозначения: Uупр. – канал управления; nн – скорость вращения вала электродвигателя;  – угол поворота наклонной шайбы насоса; qн() – рабочий объём насоса в функции угла поворота наклонной шайбы; Рк – давление настройки предохранительных напорных клапанов; Рком – давление в полости компенсатора; Р1, Р2 – давление в полостях гидроцилиндра; СП – сервопривод, управляющий поворотом наклонной шайбы; НШ – наклонная шайба.
– угол поворота наклонной шайбы насоса; qн() – рабочий объём насоса в функции угла поворота наклонной шайбы; Рк – давление настройки предохранительных напорных клапанов; Рком – давление в полости компенсатора; Р1, Р2 – давление в полостях гидроцилиндра; СП – сервопривод, управляющий поворотом наклонной шайбы; НШ – наклонная шайба.
Выражение для оценки рабочего объёма насоса:
 . (8.2)
. (8.2)
Максимальный угол наклона шайбы насоса обычно не превышает 10 - 12˚.
Параметр регулирования насоса:
 . (8.3)
. (8.3)
Это выражение безразмерное и изменяется от -1 до +1.
 (8.4)
(8.4)
Скоростная характеристика исполнительного механизма привода определяется следующим соотношением:
 . (8.5)
. (8.5)
Параметр регулирования  является функцией электрического сигнала рассогласования (Ue) и коэффициента передачи сервопривода (
является функцией электрического сигнала рассогласования (Ue) и коэффициента передачи сервопривода ( ):
):
 (8.6)
(8.6)
В насосе всегда имеются утечки рабочей жидкости, даже на холостом ходу, поэтому выражение для скоростной характеристики исполнительного механизма на холостом ходу примет вид:
 . (8.7)
. (8.7)
Рис.8.4
К пояснению физического смысла коэффициента эластичности механической характеристики приводного электродвигателя постоянного тока.
Основные утечки пропорциональны внешней нагрузке:
 . (8.8)
. (8.8)
Здесь Рi – давление в полости нагнетания, т.е. – на выходе насоса.
Механическая характеристика исполнительного механизма:
 . (8.9)
. (8.9)
Средний момент на валу электродвигателя:
 . (8.10)
. (8.10)
Здесь Рi – давление в полости нагнетания, т.е. – на выходе насоса.
Таким образом, соотношение, определяющее механическую характеристику исполнительного механизма, можно представить в виде следующего уравнения:
 Выражение для механической (нагрузочной) характеристики исполнительного механизма автономного привода с аксиально-поршневым насосом:
Выражение для механической (нагрузочной) характеристики исполнительного механизма автономного привода с аксиально-поршневым насосом:
 . (8.11)
. (8.11)
Для того, что бы построить график механической характеристики исполнительного механизма необходимо ещё определить максимальную силу, развиваемую гидроцилиндром. Эта сила равна:
 . (8.12)
. (8.12)
В этом выражении Рmax – максимальное давление, которое ограничивается предохранительными клапанами Рmax=Рк. Следовательно, максимальная сила на выходном звене привода равна:

 . (8.13)
. (8.13)
Рк – давление срабатывания предохранительных клапанов
Рком – давление в компенсаторе.




Рис.8.5 
|
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 4302; Нарушение авторских прав?; Мы поможем в написании вашей работы!