КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Переваги схеми
|
|
|
|
1.Значний діапазон регулювання.
2.Плавність і простота регулювання.
3.Мала потужність керування.
Недоліки схеми:
1.Необхідність мати три агрегати, розрахованих на потужність споживача.
2.Значні початкові і експлуатаційні витрати.
3.Низький к.к.д.
4.Інерційність процесу регулювання.
5.Шум і вібрація під час роботи.
6.Низька надійність роботи.
Тому з врахуванням вище названих недоліків сучасні системи регулювання швидкості ДПС НЗ зміною напруги живлення якоря будують з використанням тиристорних перетворювачів.
2.6. Напівпровідникові статичні перетворювачі.
Розглянемо систему „Керований випрямляч – ДПС НЗ” з використанням
однофазного нереверсивного двонапівперіодного перетворювача зібраного за нульовою схемою.
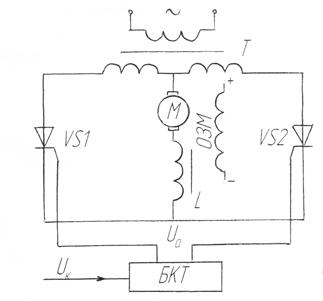
Т – узгоджуючий трансформатор;
VS1, VS2 – тиристори;
М – ДПС НЗ;
L – згладжуючий реактор;
БКТ – блок керування тириторами (система імпульсно – фазового керування тиристорами);
Для даної схеми:
α – кут затримки відкривання тиристорів відносно моменту часу, коли напруга на аноді стане позитивною.
Uср – поточне значення напруги
Uср.0 – максимально можливе
значення, якщо α=0
Рис.2.11.Схема системи ТП-Д в однофазному режимі.
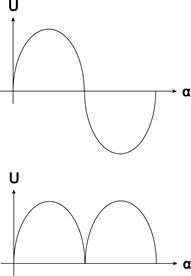
Якщо α = 0, затримка відсутня і перетворювач здійснює звичайне двонапівперіодне випрямлення, тобто на двигун подається найбільш можлива напруга.
 а)
а)
б)
Рис.2.12.Графіки напруг:
а – на виході трансформатора
б – на якорі двигуна (на затискачах).
Якщо за допомогою блока БКТ здійснювати подачу імпульсів на тиристори з затримкою, то отримаємо напругу на затискачах двигуна:
1)
2)  , де
, де
Ucр.0 – приймаємо 200 В, тоді

Висновок: Регулювання швидкості ДПС НЗ досягається зміною напруги, яка подається на двигун, а це виконується зміною кута α.
Проте однофазна система має серйозні недоліки:
- значна пульсація;
- спотворення вихідної напруги;
- великі втрати.
Тому на практиці використовуються трифазні перетворювачі.
Розглянемо схему електропривода з трифазним мостовим нереверсивним КВ.

Рис.2.13.Схема електропривода з трифазним мостовим нереверсивним КВ.
Для отримання характеристик двигуна в усих четвертях використовуються реверсивні КВ.
2.7 Схеми вмикання. Статистичні характеристики і енергетичні режими роботи двигуна постійного струму послідовного збудження (ДПС ПЗ)
Схема вмикання двигуна постійного струму послідовного збудження
(ДПС ПЗ) відрізняється від схеми ДПС НЗ, тим, що обмотка збудження ввімкнена послідовно з обмоткою якоря, тому його магнітний потік Ф залежить від сили струму І в якірному колі, тобто змінюється із зміною навантаження.
Залежність між струмом збудження і магнітним потоком, як відомо (крива намагнічування), має нелінійний характер і не має точного аналітичного виразу, тому не можна одержувати точного аналітичного виразу механічних характеристик.
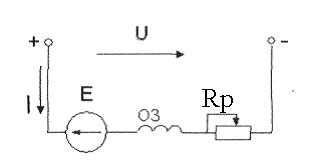
Рис.2.14. Схема вмикання ДПС ПЗ
Якщо нехтувати насиченням, то можна вважати, що магнітний потік залежить від струму прямолінійно (див. криву намагнічування ДПСПЗ).
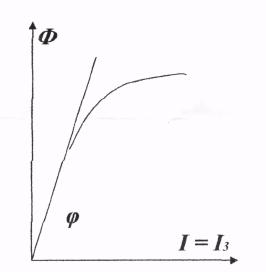
Рис.2.15. Крива намагнічування магнітної системи ДПС ПЗ
 |
Ф = αІ
де а - коефіцієнт пропорційності,
α = tgφ
Тоді електромагнітний момент двигуна становить:
 |
M = кФІ = кαІ2
 звідки
звідки

Рівняння механічної характеристики має вигляд:
 |
Рівняння електромеханічної характеристики має вигляд:
 |

З рівняння видно, що:
1.При І→ 0; М→ 0; ω→ ∞; тобто вісь швидкості є вертикальна асимптота для характеристик ДПС ПЗ,
2.При І→ ∞; М→ ∞; ω→ -R/(кα); тобто пряма з ординатою ωα→ -R/(кα) є горизонтальна асимптота характеристик ДПС ПЗ.
3.При ненасиченій магнітній системі електромеханічні і механічні характеристики ДПС ПЗ гіперболічні.
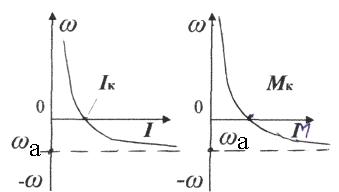
а б
Рис.2.16. Електромеханічна (а) і механічна
(б) характеристики ДПС ПЗ
3 графічного зображення електромеханічної і механічної характеристик видно, що ці характеристики м`які.
При збільшенні навантаження на валу двигуна зростає струм збудження і спочатку майже пропорційно збільшується потік, що призводить до різкого зменшення швидкості.
При значних струмах потік внаслідок насичення магнітного поля змінюється мало і відповідно менше змінюється швидкість. Оскільки сучасні ДПС ПЗ мають насичену магнітну систему, то гіперболічний характер їх характеристик зберігається лише при малих значеннях моменту. При моментах, більших від номінального, магнітний потік практично не змінюється, тому електромеханічна і механічна характеристики мають лінійний характер. Такі двигуни можна використовувати для привода машин, де мають бути значні перенавантаження, а рівномірна робота не має великого значення. При навантаженні, наближеному до холостого ходу, швидкість обертання двигуна різко зростає і може досягти значення, недопустимого за умовами механічної міцності колектора і бандажів, які кріплять обмотку якоря тобто двигун іде в розгін. ДПС ПЗ при звичайній схемі вмикання не мають швидкості ідеального холостого ходу, а отже і режиму рекуперативного гальмування.
Інші режими роботи ДПС ПЗ аналогічні режимам ДПС НЗ, тобто двигунний режим має місце при 0 < ω < ∞, режим короткого замикання здійснюється тоді, коли ω = 0, Е = 0, І = Ік, М = Мкз.. Електрична енергія надходить з мережі і витрачається на нагрівання якоря, обмотки збудження і резисторів його кола і два режими електричного гальмування: динамічне і противмикання.
|
 |
Рис.2.17. Схеми вмикання ДПС ПЗ при динамічному гальмуванні:
а- з самозбудженням; б – з незалежним збудженням
на гальмівний резистор Rд.г. Перемикання роблять так, щоб напрямок струму в обмотці збудження залишився незмінним. Двигун самозбуджується і працює генератором на Rд.г. Самозбудження відбувається (при певній величині сумарного опору якірного кола) лише починаючи з відповідної швидкості, коли є. р. с. машини стає більшою від спаду напруги в гальмівному колі. Із зменшенням швидкості гальмівний момент знижується; це зниження відбувається швидше, ніж зменшення швидкості. Пояснюється це тим, що момент двигуна створюється струмом якоря і потоком; а отже, вони зменшуються разом. Режим електродинамічного гальмування із самозбудженням можна використати для інтенсивного електричного гальмування в електроприводах транспортних машин.
Динамічне гальмування з незалежним збудженням, а також гальмування противмикання здійснюється так само, як і двигуна з незалежним збудженням.
Електродинамічне гальмування ДПС ПЗ при незалежному збудженні має ту перевагу, що дає можливість плавного гальмування. До недоліків слід віднести зникнення гальмівного моменту при зникненні напруги в мережі і значні втрати в опорі, що вмикаються послідовно з обмоткою збудження.
Регулювання кутової швидкості ДПС ПЗ
Двигуни послідовною збудження широко застосовуютьв установках і механізмах, де необхідно ругулювати частоту обертання: підйомно-транспортні машини і електромобілі (серії ЗДТ, 4ДТ), двигуни для мотор-коліс автосамоскидів з дизелю-електричним приводом (серія ДК), для міського транспорту (серія ДК), тягові двигуни для електровозів (серія ТЛ), тягові двигуни тепловозів (серія ЗД) та інші.
Аналітичні залежності ω = f(Ія), ω = f(М) для ДПС ПЗ такі ж як і для ДПС НЗ. Різниця полягає лише в тому,що у двигунах послідовного збудження магнітний потік нестала величина і залежить від струму якоря. Частоту обертання ДПС ПЗ можна регулювати резисторами в якірному колі, зміною струму збудження та зміною напруги на якорі.
При введенні додаткового резистора в якірне коло отримаємо сімейство штучних механічних характеристик (рис.2.18.). Модуль жорсткості характеристик при реостатному регулюванні зменьшується. Цей спосіб регулювання частоти обертання має невисокі економічні показники за рахунок втрат енергії в регулювальних резисторах. Може використовуватись при короткочасній роботі на зниженій частоті обертання двигуна. Тягові двигуни в ряді випадків мають реостатне регулювання частоти обертання, оскільки воно надзвичайно просте.
Діапазон реостатного регулювання частоти обертання становить 2 -
2,5. Регулювання здійснюється при Мс = const, якщо двигун має незалежну вентиляцію. Для двигунів з само вентиляцією при зниженій частоті частоті обертання необхідно відповідно до рекомендацій завода виготівника знизити навантаження на двигун з метою запобігання його перегріванню.
|
|
|
|
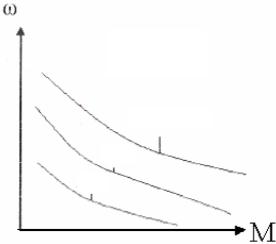
Рис.2.18. Механічні характеристики ДПС ПЗ при
введенні додаткового опору
Електродвигуни послідовного збудження, що використовуються в підйомно-транспортних установках, допускають регулювання частоти обертання вверх від номінальної шляхом зменьшення магнітного потоку двигуна в середньому в 1,5-2 рази.
Модуль жорсткості характеристик при послабленні магнітного потоку зменьшується. Регулювання частоти обертання послабленням магнітного потоку здійснюється в другій зоні тобто при постійній потужності. Втрати енергії на регулювання частоти обертання послабленням магнітного потоку невеликі, тому що опір шунтуючого резистора Rш 03 порівняно малий.
Частоту обертання ДПС ПЗ можна регулювати зміною напруги на якірному колі за допомогою перетворювача змінної трифазної напруги в регульовану постійну. Штучні механічні характеристики при цьому мають, модуль жорсткості такий, як і природна характеристика. Тиристорний перетворювач напруги (ТПН), крім регулювання напруги на якорі, дає можливість здійснювати без реостатний пуск двигунів будь-якої потужності.
Напругу на якірному колі ДПС ПЗ можна регулювати ступінчасто, з'єднуючи два двигуни послідовно, знизивши частоту обертання двигунів при номінальному навантаженні в два рази.
|
|
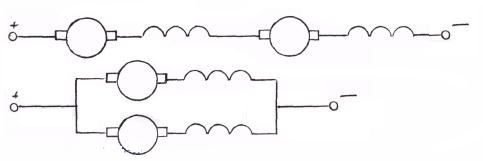
Рис.2.19. Схеми з`єднання ДПС ПЗ
З'єднані паралельно двигуни одержать номінальну напругу і перейдуть в номінальний режим роботи по напрузі. Таку схему можна використовувати в багатодвигунному приводі, де двигуни мають однакові параметри (електротранспорт). Регулювання частоти обертання ДПС ПЗ за схемою практично не має витрат енергії на регулювання.
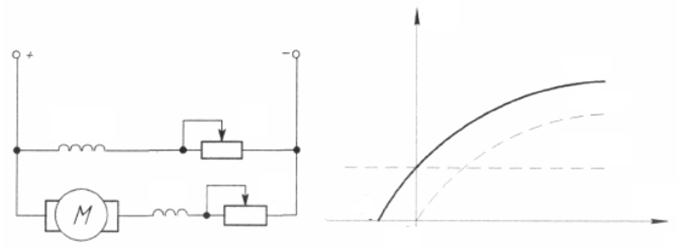
Двигуни постійного струму послідовного збудження дають можливість регулювати частоту обертання шунтуванням якоря з послідовним резистором в якірному колі. У наведеній схемі при струмі якоря ІЯ = 0в обмотці збудження ОЗ протікає струм Іш. Отже двигун має швидкість ідеального холостого ходу, рекуперативне гальмування.
Рівняння електромеханічної і механічної характеристик можна одержати аналогічно залежностям.
2.8 Схема вмикання, рівняння електромеханічних та механічних характеристик, режими роботи двигуна постійного струму змітаного збудження (ДПС 33)
Схема вмикання двигуна постійного струму змішаного збудження має дві обмотки збудження, які вмикаються узгоджено. Послідовну обмотку ОЗП вмикають послідовно з якорем, а незалежну ОЗН - на напругу мережі. Магнітні потоки цих обмоток додаються. При струмі якоря Iя→ -І1 магнітний потік Ф наближається до нуля, тобто ДПС 33 розмагнічується. Внутрішній опір двигуна 33 приблизно визначається за формулою:
Rдв ≈ 0,6 (1-ηном). Rном
Якщо струм якоря дорівнює нулю, магнітний потік ДПС 33 створюється обмоткою незалежного збудження, внаслідок чого швидкість ідеального холостого ходу цього двигуна має певне значення, трохи більше порівняно із швидкістю ідеального холостого ходу двигуна незалежного збудження. Значення швидкості ідеального холостого ходу можна обчислити за формулою:

Де Фн.з. - магнітний потік, створений незалежною обмоткою збудження.
|
|
|
|
|
|
|
|
|
|
а) б)
Рис.2.20. Схема вмикання (а) і характеристика намагнічування ДПС ЗЗ (б)
Частота обертання такого двигуна:
 ,
,
Де Фозн; Фозп - потоки незалежної і послідовної обмоток збудження. Знак плюс відповідає узгодженому включенню обмоток збудження. Зі збільшенням навантаження загальний магнітний потік зростає (за рахунок послідовної обмотки Фозп), що веде до зменшення частоти обертання двигуна. При зустрічному включенні обмоток, потік Фозп при збільшенні навантаження розмагнічує машину (знак мінус), що навпаки, підвищує частоту обертання. Робота двигуна при цьому стає нестійкою, так як із збільшенням навантаження необмежено росте. Але при невеликому числі витків послідовної обмотки із збільшенням навантаження частота обертів не зростає, а на всьому діапазоні навантажень залишається практично незмінною.
На відміну від механічних характеристик двигуна послідовного збудження, останні мають більш пологий вид. Слід відмітити, що по своїй формі, характеристики двигуна змішаного збудження займають проміжне положення між відповідними характеристиками двигунів послідовного і паралельного збудження, в залежності від того, в якій з обмоток збудження переважає МДС.
Завдяки наявності обмотки послідовного збудження ДПС 33 мають більшу кратність пускового моменту при меншій кратності пускового струму (порівняно із ДПС НЗ) і меншу кутову швидкість обертання при його навантаженні. Для ДПС 33, як і для ДПС ПЗ, точного аналітичного виразу механічних характеристик одержати не можна.
Природну і штучну механічні характеристики ДПС 33 можна побудувати аналогічно побудові відповідних характеристик ДПС ПЗ.
Для практичних розрахунків використовуються універсальні характеристики двигуна, які приводяться в довідниковій літературі. Оскільки характеристики двигуна розміщуються і в другому квадраті, то він може працювати в усіх відомих режимах.
В електроприводах з ДПС 33 використовують гальмування з рекуперацією енергії в мережу, електродинамічне та проти вмиканням. Здійснюють це так само, як і в ДПС НЗ. Коли ДПС 33 переходить у режим рекуперативного гальмування, струм в якорі і послідовній обмотці збудження змінює напрямок. Щоб запобігти розмагнічуючому впливу послідовної обмотки її вимикають або закорочують. Після цього механічні характеристики в режимах рекуперативного і електродинамічного гальмувань стають прямими лініями, подібними до відповідних характеристик ДПС НЗ.
Двигун змішаного збудження має переваги порівняно з двигуном послідовного збудження. Цей двигун може працювати вхолосту, так як потік паралельної обмотки в режимі холостого ходу і усуває небезпеку «розносу». Регулювати частоти обертання цього двигуна можна реостатом в колі незалежної обмотки збудження. Однак, наявність двох обмоток збудження явно збільшує кількість матеріалів на виготовлення двигуна, і тим самим його вагу, габарити і вартість. По цій причині цей тип двигуна в наш час застосовується тільки в тих випадках, коли його використання диктується якими-небудь специфічними вимогами з боку робочої машини і підтверджується техніко-економічним розрахунком.
Двигуни змішаного збудження застосовують звичайно там, де потребуються значні пускові моменти, швидке прискорення при розгоні, стійка робота, допустиме лише невелике зниження частоти обертання при збільшенні навантаження на вал (прокатні станки, грузові підйомники, насоси, компресори).
2.9 Узагальнення з розділу.
Двигуни постійного струму використовуються переважно в електроприводах тих робочих машин, де потрібне плавне і глибоке регулювання частоти обертання.
До переваг двигунів постійного струму можна віднести наявність:
1) широкого діапазону регулювання частоти обертання (від 0 до птіn і
вище до птaх);
2) трьох порівняно простих і надійних способів регулювання частоти обертання: зміною напруги а обмотці якоря, струму збудження та додаткового опору в колі обмотки якоря;
3) великих значень пускових моментів;
4) можливості забезпечення плавного пуску та електричного гальмування;
5) більшої, ніж для машин змінного струму, перевантажувальної здатності.
До недоліків двигунів постійного струму можна віднести такі властивості:
1) значно більші, ніж у машинах змінного струму, габарити, маса та вартість;
2) жорсткі вимоги стосовно правил запуску;
3) великі експлуатаційні витрати;
4) відносно низька надійність у роботі;
5) низький ККД.
В електроприводах робочих машин здебільшого використовуються двигуни постійного струму серії 2П та 4П, що мають такі граничні номінальні параметри:
- номінальна потужність:
- при напругах 110, 220 В від 0; 13 до 220 кВт
- при напругах 440, 600 В від 110 до 800 кВт.
Література
1. В. В.Москаленко. Электрический привод. - М.: Высшая школа, 1991.
2. Електропривод. Підручник. За редакцією Ю.М. Лавріненка.
Видавництво «Ліра - К». - К., 2009.
3. Теорія електропривода. Підручник. За редакцією М.Г. Поповича. -К.: Вища школа, 1993.
4. Електропривод. За редакцією О.С.Марченка. -К.: Урожай, 1995.
5. Практикум з електропривода. В.С. Олійник, О.С. Марченко та ін.; -К: Урожай, 1995.
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 2851; Нарушение авторских прав?; Мы поможем в написании вашей работы!