КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Регулювання координат ДПС НЗ
|
|
|
|
Використовуються такі способи регулювання координат ДПС НЗ:
1) введенням(або виведенням) додаткового опору Rд в коло якоря;
2) зменшенням(ослабленням) магнітного потоку, Ф;
3) зміною напруги живлення якоря, U
Розглянемо спосіб регулювання швидкості введенням додаткового опору в коло якоря на прикладі сім`ї характеристик
 ;
;
 ;
;

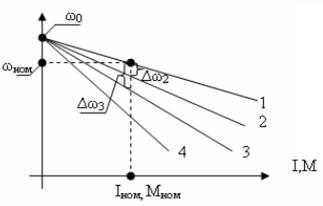
Рис.2.5 Природна (1) і штучні (2,3,4) механічні характеристики при введенні опору в коло якоря.
1 – природна механічна(електромеханічна) характеристика, отримана при номінальних параметрах: U = Uном.; Ф =Фном; Rд = 0.
Якщо ми введемо додатковий опір в коло якоря, тобто Rд ≠ 0 то отримаємо штучну характеристику 2; якщо збільшимо Rд – отримаємо штучну характеристику – 3; ще збільшимо Rд – отримаємо штучну
характеристику– 4.
Для них справедливо співвідношення
RД2 < RД3 < RД4
Всі характеристики проходять через точку ω = ωо, тому що ωо не залежить від R, а зміна швидкості ∆ω прямо пропорційна зміні опору R.
Оцінка даного способу регулювання
Основна перевага цього способу – це простота реалізації.
НЕДОЛІКИ
1.Із збільшенням додаткового опору в колі якоря зменшується жорсткість характеристик.
2.Значні втрати потужності.
3.Незначний діапазон регулювання, 2 – 3
4.Громіздскість апаратури для перемикання опорів.
2.4. Регулювання швидкості ДПСНЗ зміною магнітного потоку.
Цей спосіб находить широке використання в електричних приводах за простоти реалізації і економічності. Томущо регулювання здійснюється в відносно малопотужному колі збудження і не супроводжується великими втратами потужності.
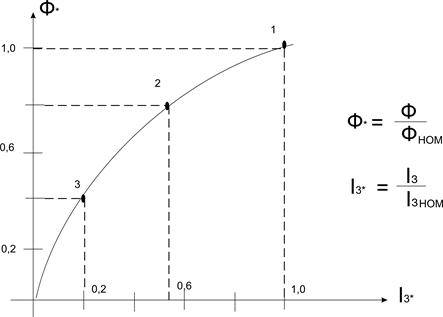
Магнітна система ДПС сконструйована так, що в номінальному режимі близька до насичення (точка 1 кривої намагнічування). Тому регулювання здійснюється тільки в бік ослаблення магнітного потоку.



|
Рис.2.6. Крива намагнічування ДПС
Розглянемо формування електромеханічних характеристик при ослабленні магнітного потоку з точки 1 до точки 2, потім до точки 3.
При зменшенні магнітного потоку до точки 2 (кривої намагнічування) згідно формули  швидкість холостого хода збільшиться і стане ω02 , а струм Ік.з. згідно формули
швидкість холостого хода збільшиться і стане ω02 , а струм Ік.з. згідно формули  залишається без зміни.
залишається без зміни.
Тоді за двома точками: холостого хода і короткого замикання будуємо штучну електромеханічну характеристику 2(рис. 2.7).
Якщо ще змінимо магнітний потік до точки 3(кривої намагнічування), то відповідно швидкість холостого ходу збільшиться до ω03, а струм короткого замикання Ік.з. без зміни і ми будуємо штучну електромеханічну характеристику 3(рис. 2.7).
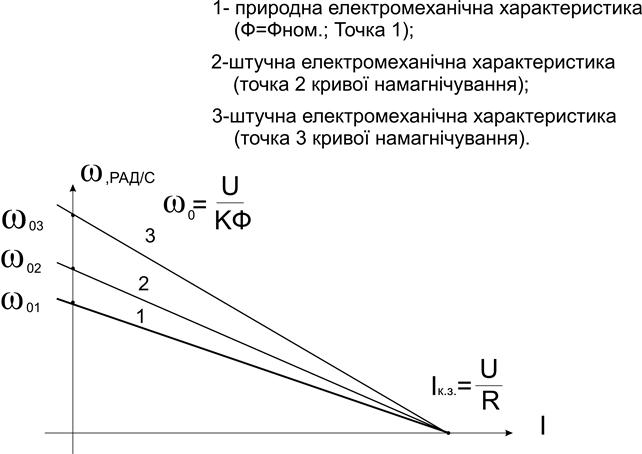
Рис.2.7.Електромеханічні характеристики ДПС НЗ при ослабленні збудження.
Розглянемо формування механічних характеристик ДПС НЗ при ослабленні магнітного потоку. Якщо почнемо зменшувати магнітний потік до точки 2 кривої намагнічування; то згідно формули швидкості холостого хода збільшиться і стане ω02; згідно формули Мк.з. = кФІк.з. момент к.з. зменшиться до Мк.з.2.
швидкості холостого хода збільшиться і стане ω02; згідно формули Мк.з. = кФІк.з. момент к.з. зменшиться до Мк.з.2.
Тоді за двома точками: холостого хода і короткого замикання будуємо штучну характеристику 2(рис. 2.8).
Якщо ще зменшимо магнітний потік до точки 3 кривої намагнічування, то відповідно швидкість холостого хода збільшиться до ω03, момент короткого замикання зменшиться до Мк.з.3 і ми будуємо штучну характеристику 3 (рис. 2.8).
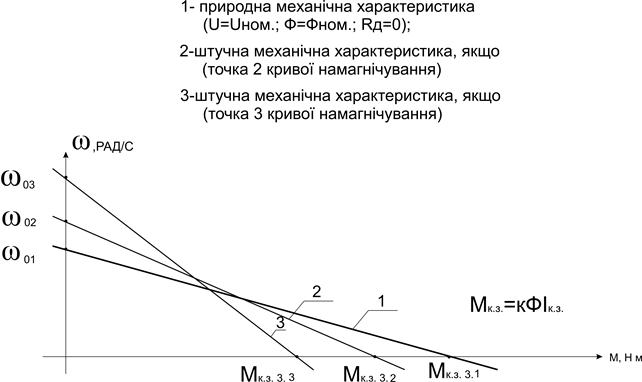
Рис.2.8. Механічні характеристики ДПС НЗ при ослабленні магнітного потоку (зменшення струму збудження).
Оцінка даного способу регулювання:
1.Діапазон регулювання в межах 3-4.
2.Плавність регулювання визначається плавністю зміни струму збудження.
3.Стабільність регулювання.
4.Малі втрати потужності.
5.При зменшенні потоку зменшується жорсткість характеристик.
Зменшення(ослаблення) магнітного потоку досягається зменшенням струму збудження Із. Для зменшення струму збудження згідно формули  необхідно ввести додатковий опір в коло збудження або зменшувати напругу U3.
необхідно ввести додатковий опір в коло збудження або зменшувати напругу U3.
2.5. Регулювання координат електропривода з ДПС НЗ зміною напруги якоря.
Даний спосіб є основний, найбільш економічний і перспективний.
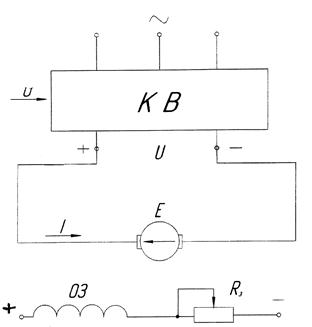
Реалізація даного способу передбачає живлення якоря ДПС НЗ від перетворювача. Враховуючи, що основним джерелом живлення є трифазна мережа змінного струму, то таким перетворювачем є керований випрямляч(КВ). На виході КВ напруга регулюється по величині і при необхідності по полярності.
а)
б)
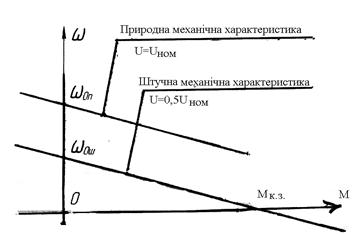
Рис.2.9. Загальна схема „КВ – ДПС НЗ”
З графіка - рис.2.9.б. бачимо, що штучні характеристики розміщуються
паралельно, нижче від природної характеристики, тому що при зменшенні
напруги пропорційно зменшується швидкість холостого хода ω0 і момент короткого замикання Мк.з.
Керований випрямляч виконується у вигляді електромашинної системи „Генератор – двигун (Г-Д)” або системи „Тиристорний перетворювач – двигун (ТП-Д)”.
Позначення:
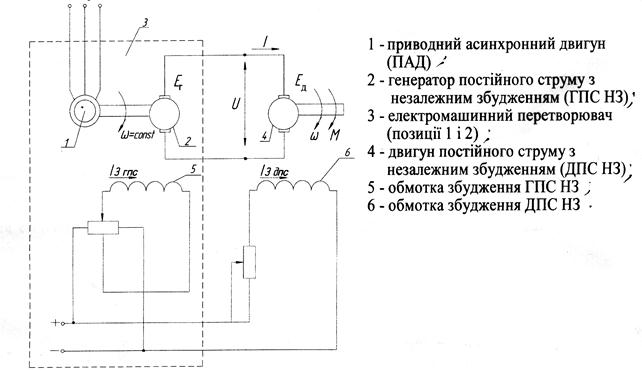
Рис.2.10. Схема „Генератор – двигун” „Г-Д”
Регулювання швидкості ДПС НЗ (поз. 4) здійснюється двома способами.
Перший спосіб. Якщо зменшимо струм збудження ГПС зменшиться магнітний потік ГПС (крива намагнічування), зменшиться е.р.с. на виході ГПС(Е=кФω), зменшиться напруга, яка подається на ДПС НЗ і відповідно зменшиться швидкість ДПС ().
Другий спосіб. Якщо зменшимо струм збудження ДПС, зменшиться магнітний потік ДПС (крива намагнічування) і згідно формули швидкість ДПС збільшиться.
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 2093; Нарушение авторских прав?; Мы поможем в написании вашей работы!