КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Лекция 12. Шина CAN-bus
|
|
|
|
Шина CAN-bus была создана в конце 80-х годов фирмой Robert Bosch GmbH (Германия) как решение для распределенных систем, работающих в режиме реального времени. Отличительной особенностью шины является ее высокая помехозащищенность. Дополнительным преимуществом шины CAN выступает ее устойчивость к механическим повреждениям - замыкание проводников шины на общий провод, питание или между собой не приводит к выходу из строя устройств. Более того, некоторые модификации шины способны функционировать при обрыве одного из проводников.
CAN-шина в промышленных сетях
Полевая шина CAN (Controller Area Network) характеризуется высокими скоростью передачи данных и помехоустойчивостью, а также способностью обнаруживать любые возникающие ошибки. Благодаря этому CAN сегодня широко используется в таких областях, как автомобильный и железнодорожный транспорт, промышленная автоматика, авиация, системы доступа и контроля. По данным ассоциации CiA (CAN in Automation, www.can-cia.de), в настоящее время в эксплуатации находится около 300 млн CAN-узлов по всему миру. В Германии CAN-шина занимает первое место по популярности среди остальных полевых шин.
Характеристики протокола CAN Преимущества CAN
Общая тенденция в области автоматизации состоит в замене традиционной централизованной системы управления на распределенное управление путем размещения интеллектуальных датчиков и исполнительных механизмов рядом с управляемым процессом. Это вызвано ростом числа проводов связи, увеличением количества соединений, сложностью диагностики ошибок и проблемами с надежностью. Связь между узлами такой системы осуществляется с помощью полевой шины. CAN — это система связи для многоконтроллерных систем. Рассмотрим более подробно преимущества CAN и причины, по которым CAN приобретает все большее распространение.
Испытанный стандарт. Протокол CAN активно используется уже более 20 лет, что очень важно для таких консервативных областей как железнодорожный транспорт или судостроение. CAN был разработан в 1980 г. фирмой Robert Bosch для автомобильной промышленности. CAN-интерфейс регламентирован международными стандартами ISO 11898 для высокоскоростных и ISO 11519-1 для низкоскоростных приложений. Низкая стоимость определяется хорошим соотношением цена/производительность, также широкой доступностью CAN-контроллеров на рынке. Надежность определяется линейной структурой шины и равноправностью ее узлов, так называемой мультимастерностью (Multi Master Bus), при которой каждый узел CAN может получить доступ к шине. Любое сообщение может быть послано одному или нескольким узлам. Все узлы одновременно считывают с шины одну и ту же информацию, и каждый из них решает, принять данное сообщение или игнорировать его. Одновременный прием очень важен для синхронизации в системах управления. Отказавшие узлы отключаются от обмена по шине.
Высокая помехоустойчивость достигается благодаря подавлению синфазных помех дифференциальным приемопередатчиком, работе встроенных механизмов обнаружения ошибок (одна необнаруженная ошибка за 1000 лет при ежедневной 8-часовой работе сети на скорости 500 Кбит/с), повтору ошибочных сообщений, отключению неисправных узлов от обмена по шине и устойчивости к электромагнитным помехам.
Гибкость достигается за счет простого подключения к шине и отключения от шины CAN-узлов, причем общее число узлов не лимитировано протоколом нижнего уровня. Адресная информация содержится в сообщении и совмещена с его приоритетом, по которому осуществляется арбитраж. В процессе работы возможно изменение приоритета передаваемого сообщения. Следует также отметить возможность программирования частоты и фазы передаваемого сигнала и арбитраж, не разрушающий структуру сообщений при конфликтах. На физическом уровне есть возможность выбора разнотипных линий передачи данных: от дешевой витой пары до оптоволоконной линии связи.
Работа в реальном времени становится возможной благодаря механизмам сетевого взаимодействия (мультимастерность, широковещание, побитовый арбитраж) в сочетании с высокой скоростью передачи данных (до 1 Мбит/с), быстрой реакцией на запрос передачи и изменяемой длиной сообщения от 0 до 8 байт.
Приложения CAN
CAN является идеальным решением для любого приложения, где микроконтроллеры обмениваются сообщениями друг с другом и с удаленными периферийными устройствами. Изначально CAN использовался в автомобилях для обеспечения критичного по времени управления и обмена информацией между двигателем и коробкой передач при гарантированном времени ожидания сообщения и допуске каждого из участников сети к работе с текущими данными. Наряду с достаточно дорогими высокоскоростными решениями существуют и экономичные решения для подключения к сети инерционных устройств, которые работают в шкале времени сотен микросекунд (система управления дверьми, подъемник окна, управление зеркалом). При этом мощные жгуты электрических проводов заменяются двухпроводной CAN-сетью, узлами которой являются, в том числе, тормозные огни и указатели поворота.
Широкое применение CAN нашел в промышленной автоматике, где имеется большое число устройств управления, датчиков, механизмов, электроприводов и других объектов, которые связаны единым технологическим циклом (системы отопления и кондиционирования, насосы, конвейеры, лифты, эскалаторы, транспортеры и т. д.). Важной особенностью таких систем является возможность диагностики и управления объектами, расположенными на большой территории, по адаптивным алгоритмам. В результате достигается существенное уменьшение потребляемой мощности, шума, износа оборудования. Подобная картина наблюдается и в железнодорожных бортовых системах, где решающую роль играет обмен данными между подсистемами при наборе скорости, торможении, управлении дверьми и диагностике.
Физический уровень
Физический уровень CAN-шины представляет собой соединение «монтажное И» между всеми устройствами, подключенными к ней. Дифференциальные сигнальные линии называются CAN_H и CAN_L и в статическом состоянии находятся под потенциалом 2,5 В. Лог. 1 (рецессивный бит) обозначает состояние шины, при котором уровень на линии CAN_H выше, чем уровень CAN_L. При лог. 0 (доминантный бит) уровень на линии CAN_H ниже, чем уровень CAN_L. Принято следующее соглашение о состоянии шины: пассивное состояние шины соответствует уровню лог. 1, а активное — уровню лог. 0. Когда сообщения не передаются по шине, она находится в пассивном состоянии. Передача сообщения всегда начинается с доминантного бита. Логика работы шины соответствует «проводному И»: доминантный бит «0» подавляет рецессивный бит «1» (рис. 12.1).
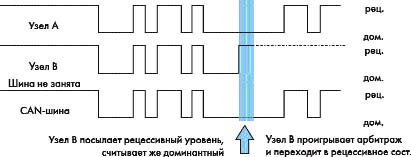
Рис. 12.1. Логика работы CAN шины
При физической реализации конкретного проекта с CAN необходимо определить свойства шины и ее узлов: где располагаются обрабатывающие устройства, какими свойствами они обладают, какие датчики и исполнительные механизмы присутствуют в системе, являются они интеллектуальными или нет, что можно сказать об их физическом расположении. В зависимости от условий эксплуатации могут использоваться однопроводная линия (в пределах печатной платы), двухпроводная линия, витая пара или волоконно-оптическая линия. При дифференциальном методе формирования сигналов двухпроводная линия позволяет значительно повысить помехоустойчивость. При использовании дифференциальных напряжений CAN-сеть продолжает функционировать в чрезвычайно шумной среде или при обрыве одной из сигнальных линий. Даже при простой витой паре дифференциальные входы CAN эффективно нейтрализуют шум.
Максимальная скорость передачи данных составляет 1 Мбит/с при длине шины 40 м и около 40 Кбит/с при длине шины 1000 м.
Разновидности CAN
В настоящее время доступны различные устройства с CAN-интерфейсом, которые помимо передачи данных из одной точки в другую позволяют реализовать синхронизацию процессов и обслуживание по приоритетам. Более ранние реализации CAN-контроллеров используют кадры с 11-разрядным идентификатором и возможностью адресации до 2048 сообщений и соответствуют спецификации CAN V. 2.0A. Такие контроллеры носят название Basic CAN и характеризуются сильной загруженностью центрального процессора (ЦПУ), так как каждое входящее сообщение запоминается в памяти и ЦПУ решает, нужны ему данные сообщения или нет (рис. 12.2). Контроллеры Basic CAN содержат один передающий буфер и один или два приемных буфера сообщений. Чтобы послать или получить сообщение, требуется задействовать ЦПУ через прерывания «сообщение_послано» и «сообщение_получено». В результате проверки каждого входящего сообщения загрузка ЦПУ очень велика, что ограничивает реальную скорость обмена по сети. По этой причине такие контроллеры используются в сетях CAN с низкой скоростью обмена и/или малым количеством сообщений.
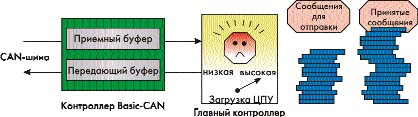
Рис. 12.2. Структура контроллера Basic CAN
Большинство выпускаемых сегодня CAN-контроллеров используют расширенные кадры сообщений с идентификатором длиной 29 разрядов, что позволяет адресовать до 536 млн сообщений. Такие контроллеры соответствуют спецификации CAN V. 2.0B (active) и называются контроллеры Full-CAN. В них предусмотрен буфер для нескольких сообщений, причем каждое сообщение имеет свою маску, и фильтрация осуществляется по соответствию идентификатора маске.
В случае Full-CAN ЦПУ максимально разгружено, поскольку не обрабатывает ненужные сообщения (рис. 12.3). При приеме сообщения с идентификатором, соответствующим маске, оно запоминается в специальной зоне двухпортового ОЗУ, и работа ЦПУ прерывается. Full-CAN имеет также специальный тип сообщения, которое означает: «у кого бы ни находилась эта информация, пожалуйста, пошлите ее сейчас же». Контроллер Full-CAN автоматически прослушивает все сообщения и посылает запрошенную информацию.

Рис. 12.3. Структура контроллера Full-CAN
До недавнего времени в промышленности был широко распространен Basic CAN с 11-разрядным идентификатором. Этот протокол допускает простую связь между микроконтроллерами и периферийными устройствами при скорости обмена вплоть до 250 Кбит/с. Однако при стремительном удешевлении CAN-контроллеров использование Full-CAN стало оправданным и для связи с медленными устройствами. Если в промышленных приложениях требуется высокоскоростной (до 1 Мбит/с) обмен данными, то непременно следует использовать Full-CAN.
Арбитраж узлов CAN-шины
CAN имеет много уникальных свойств, отличающих его от других шин. В протоколе CAN осуществляется посылка сообщений по общей CAN-шине, при этом отсутствуют адреса отправителя и получателя сообщения. Каждый узел постоянно «просматривает» шину и осуществляет локальную фильтрацию при приеме, используя битовые маски, и решает, какие сообщения извлекать из шины.
В результате, узел принимает и обрабатывает только те сообщения, которые предназначены именно для него.
Каждое сообщение имеет свой приоритет, значение которого содержится в идентификаторе сообщения. Кроме того, идентификаторы используются для обозначения типа сообщения. Сообщению с младшим номером идентификатора соответствует высший приоритет; наивысшим приоритетом обладает сообщение с идентификатором, состоящим полностью из нулей. Передача сообщения начинается с отправки на шину идентификатора. Если доступ к шине требуют несколько сообщений, то сначала будет передано сообщение с наиболее высоким приоритетом, то есть с меньшим значением идентификатора, независимо от других сообщений и текущего состояния шины. Каждый узел перед передачей сообщения проверяет, работает ли узел с более высоким приоритетом. Если да, то он возвращается в состояние приемника и пытается передать сообщение в другое время. Это свойство имеет особое значение при использовании в системах управления реального времени, поскольку значение приоритета жестко определяет время ожидания.
Если передача узла А приостанавливается узлом B, посылающим сообщение с более высоким приоритетом, то, как только шина освободится, будет сделана другая попытка передачи сообщения от узла A. Этот принцип получил название CSMA/CA: Carrier Sense Multiple Access/Collision Avoidance (общий доступ с опросом/предотвращение конфликтов). Такой режим в отличие от Ethernet не позволяет конфликтующим узлам в шине выяснять отношения, а сразу выявляет победителя и сокращает время обмена.
Итак, благодаря арбитражу шины сообщение с высшим приоритетом передается первым, обеспечивая функционирование системы в реальном масштабе времени и быструю передачу информации. Распределение приоритетов между различными типами сообщений задается разработчиком при проектировании сети.
Формат сообщений
Если не учитывать процедуру повтора сообщения, принятого с ошибкой, существует два вида связи между узлами: один узел передает информацию, а другой получает, или узел A запрашивает узел B о данных и получает ответ.

Рис. 12.4. Кадр данных (Data Frame)
Для передачи данных служит кадр данных — Data Frame (рис. 12.4), который содержит:
- идентификатор, указывающий на тип сообщения («скорость_двигателя», «температура_масла») и на приоритет доступа к шине. Поле идентификатора содержит различное количество бит в зависимости от разновидности протокола: в стандартном формате CAN V2.0A предусмотрен 11-разрядный идентификатор, а в расширенном CAN V2.0B — 29-разрядный;
- поле данных, содержащее соответствующее сообщение («скорость_двигателя»= 6000 об/мин, «температура_масла»=110 °C) длиной до восьми байт;
- два байта контрольной суммы — Cyclic Redundancy Check (CRC) для выявления и коррекции ошибок передачи.
Для запроса информации узел CAN использует кадр запроса данных Remote Frame (рис. 12.5), который содержит:
- идентификатор, определяющий тип запрашиваемой информации («скорость_ двигателя», «температура_масла») и приоритет сообщения;
- два байта контрольной суммы CRC.

Рис. 12.5. Кадр запроса данных Remote Frame
В этом случае за идентификатором не следуют данные и код длины данных не имеет прямого отношения к количеству байт данных. Узел, которому предложено передать информацию (датчик температуры масла), передает кадр данных, содержащий требуемую информацию. Таким образом, если узел А направляет узлу В кадр запроса с идентификатором «температура_масла», то узел В опрашивает датчик температуры и направляет узлу А кадр данных, содержащий идентификатор «температура_масла» и требуемую информацию.
Дополнительная информация, содержащаяся в кадре, позволяет определить формат и синхронизацию протокола передачи сообщения и тип посылки:
- какое сообщение послано — запрос о данных или собственно данные определяют бит удаленного запроса передачи (RTR для 11-разрядного идентификатора и SRR для 29-разрядного);
- код длины данных, сообщающий, сколько байтов данных содержит сообщение; все узлы принимают кадр данных, но те из них, которым эта информация не нужна, ее не сохраняют;
- для обеспечения синхронизации и контроля кадр содержит поля начала кадра Start of Frame, конца кадра End of Frame и подтверждения Acknowledgement Field;
- вход в режим синхронизации на шине осуществляется первым битом поля Start of Frame, далее синхронизация поддерживается фронтом при смене уровня посылаемых битов;
- используется механизм битстаффинга — вставка дополнительного бита при следующих подряд пяти нулях или единицах.
Обнаружение ошибок
Сигнализация об ошибках происходит путем передачи кадра ошибки Error Frame. Он инициируется любым узлом, обнаружившим ошибку. CAN-контроллеры используют метод статистической обработки ошибок. Каждый узел содержит счетчики ошибок при передаче и приеме Transmit Error Counter и Receive Error Counter. Если передатчик или приемник обнаруживают ошибку, значение соответствующего счетчика увеличивается. Когда значение счетчика превышает некоторый предел, текущая передача прерывается. Узел выдает сигнал об ошибке в виде Error Frame, где выставляет активный доминантный флаг ошибки длиной 6 бит. После этого узел, передача которого была прервана, повторяет сообщение. Ненадежным или частично поврежденным узлам разрешено посылать лишь пассивный рецессивный флаг ошибки.
В CAN существует несколько разновидностей ошибок. Из них три типа на уровне сообщений:
- CRC Error — ошибка контрольной суммы (при несовпадении принятой в поле CRC и вычисленной контрольных сумм).
- Form Error — ошибка формата кадра при несоответствии принятого сообщения формату CAN.
- Acknowledgement Error — ошибка подтверждения приема сообщения, если ни один из узлов не подтвердил правильного получения сообщения.
Кроме того, существует два типа ошибок на битовом уровне:
- Bit Error — обнаружение активным узлом расхождения между посланным в шину уровнем и фактическим значением за счет реализации узлом механизма самоконтроля.
- Stuff Error — наличие в поле сообщения шести следующих подряд бит 0 или 1 (ошибка битстаффинга).
Благодаря этим механизмам обнаружения и коррекции ошибок вероятность пропуска ошибки крайне мала. Например, при скорости 500 Кбит/с, загруженности шины 25 % и использовании в течение 2000 часов в год возникает лишь одна необнаруженная ошибка за 1000 лет. Кроме того, в шине невозможна ситуация блокировки неисправным узлом работы всей сети. Такие узлы обнаруживаются и отключаются от обмена по шине.
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 9331; Нарушение авторских прав?; Мы поможем в написании вашей работы!