КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Критерий Найквиста. Согласно критерию Найквиста система находится на колебательной границе устойчивости, если амплитудно-фазовая характеристика разомкнутого контура проходит
|
|
|
|
Согласно критерию Найквиста система находится на колебательной границе устойчивости, если амплитудно-фазовая характеристика разомкнутого контура проходит через точку  . Следовательно, условием существования автоколебаний является равенство:
. Следовательно, условием существования автоколебаний является равенство:
 (4.58)
(4.58)
или
 (4.59)
(4.59)
Левая часть уравнения (4.59) представляет собой АФХ линейной части, а правя – обратную характеристику нелинейного элемента, взятую с противоположным знаком.
Уравнение (4.59) можно решить графически. Строится два графика  , точки пересечения этих графиков определяют режимы колебаний с постоянной амплитудой и частотой.
, точки пересечения этих графиков определяют режимы колебаний с постоянной амплитудой и частотой.
Для определения режима автоколебаний пользуются следующим правилом:
Если точка на графике  , близкая к точке пересечения, но сдвинутая в сторону увеличения параметра
, близкая к точке пересечения, но сдвинутая в сторону увеличения параметра  не охватывается графиком
не охватывается графиком  , то колебания являются устойчивыми, в противном случае – неустойчивыми.
, то колебания являются устойчивыми, в противном случае – неустойчивыми.
 |
Рис. 4.49.
На рисунке точка М1 соответствуют режиму автоколебаний, а М2 – неустойчивым колебаниям.
ПРИМЕР
Пусть дана нелинейная система:
Рис. 4.50.
Параметры системы:
Линейная часть представлена  , где k=0.4; T1=1 c; T2=5 c.
, где k=0.4; T1=1 c; T2=5 c.
Нелинейный элемент имеет характеристику
Рис. 4.51.
Определить есть ли в данной системе автоколебания. Если есть, то найти параметры входного воздействия, при котором в системе наблюдаются автоколебания.
Применим метод гармонической линеаризации:






Найдем значение xm, ω.:
Из второго уравнения системы имеем:
 =>
=> 
В системе возможны автоколебания при ω> 0, значит, они возможны только при 
Из первого уравнения системы найдем xm, соответствующие



Разрешив биквадратное уравнение через замену переменной 


Получаем четыре корня:


Очевидно, что при всех x m ограничения (1), (2) выполняются, при x m ≤0 в системе автоколебаний быть не может. Получилось 2 решения системы: (0.45;1.001) и (0.45;21.253). Для дополнительных исследований используем критерий Михайлова:




Проверим, выполняется ли неравенство (*) для полученных решений:
а). При ω =0.45 x m=1.001

Как видно неравенство не выполняется, значит, при данных значениях в системе автоколебаний не будет.
б). При ω =0.45 x m=21.253

Неравенство выполняется, значит, при данных значениях входного сигнала в системе будут наблюдаться автоколебания. Промоделируем эту схему в MATLAB 5.1.
Полученная схема:
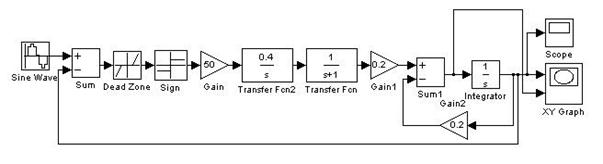
Рис. 4.52.
Выходной сигнал системы при значениях входного сигнала ω =0.45 x m=21.253:

Рис. 4.53.
Фазовая траектория:
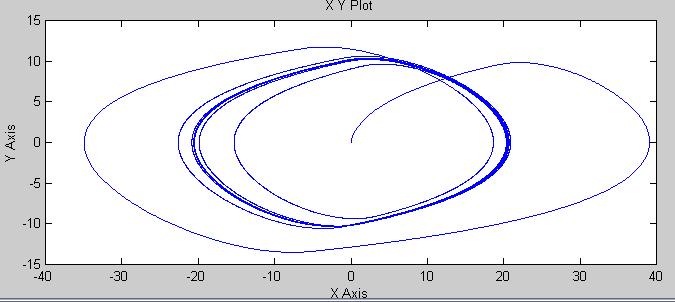
Рис. 4.54.
|
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 466; Нарушение авторских прав?; Мы поможем в написании вашей работы!