КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Типовые структуры измерительных приборов и измерительно-вычислительных систем
|
|
|
|
Отличительными особенностями современной авиации являются увеличение скоростей, дальности и высот полета, расширение круга решаемых задач, высокий уровень безопасности полета ЛА. Значительно повысились требования к точности и быстродействию средств измерения и определения пилотажных, навигационных и других параметров движения, режимов работы силовой установки, агрегатов и отдельных систем. Все это определило необходимость учета многочисленных внешних факторов и случайных возмущений, использования принципов комплексирования и оптимальной фильтрации, широкого применения вычислительной техники для обработки, преобразования и отображения измерительной информации. Специализированные вычислительные устройства, микроЭВМ и БЦВМ становятся базой, на основе которой отдельные датчики и преобразователи информации объединяются в информационно-измерительные вычислительные системы приборные комплексы, обеспечивающие измерение первичных параметров, сбор, передачу и совместную обработку измерительной информации, выдачу результатов в форме удобной для восприятия экипажем, ввода в системы автоматического управления, подачи в другие технические системы ЛА.
Аналогичная потребность совместной обработки большого числа первичных измерительных сигналов, характеризующих состояние контролируемого объекта или процесса имеет место в промышленности, энергетике и в других областях техники.
Как указано выше, под измерительно-вычислительными системами понимают совокупность измерительных, математических, алгоритмических, программных, вычислительных и других вспомогательных технических средств, объединенных единством задачи и алгоритмом функционирования и предназначенных для автоматического сбора измерительной информации, ее преобразования и обработки в целях представления потребителю в требуемом виде, либо автоматического осуществления функции контроля, диагностики, идентификации, экспертизы, управления и т. д. В ИВС объединяются технические средства, начиная от приемников и датчиков исходной информации и кончая устройствами хранения, выдачи и регистрации выходной информации, а также все аппаратные и программные средства, необходимые для управления работой системы.
При системном анализе ИВС, описании принципов построения, обосновании функционального состава, описании назначения элементов и взаимосвязей широко применяются структурные схемы. По виду структурной схемы ИВС можно разделить на несколько типовых групп.
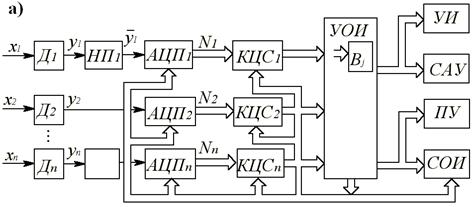
1. Системы с параллельными измерительными каналами (иногда их называют системами параллельного действия или многоканальными ИВС). В таких ИВС (рис. 1.5, а) исходные параметры x 1, x 2 ,…, xn воспринимаются соответствующими датчиками (первичными преобразователями) Д i, выходные сигналы yi которых по независимым каналам, включающим согласующие и нормирующие преобразователи НП i, аналого-цифровые преобразователи АЦП i и каналы цифровой связи КЦС i (порты ввода), подаются на устройство обработки информации (УОИ). При этом УОИ может включать несколько вычислителей В j или выполнять несколько независимых алгоритмов обработки воспринимаемых сигналов. Выходные сигналы УОИ подаются на автономные устройства индикации УИ или общую для нескольких каналов, систему отображения информации СОИ, а также в систему автоматического управления САУ и на другие технические системы ТС. Организация взаимодействия функциональных элементов ИВС осуществляется блоком управления, функции которого обычно выполняются непосредственно УОИ.
Для таких ИВС характерна повышенная надежность работы, т. к. отказ или сбой одного из каналов не приведет к отказу системы в целом, а также высокое быстродействие за счет возможности реализации параллельной обработки информации. Недостатками ИВС параллельного действия являются большие аппаратные затраты и стоимость, а также сложный алгоритм управления.
в)
г)
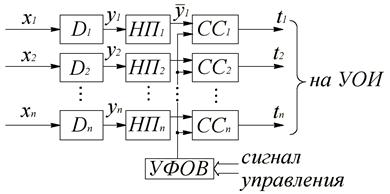
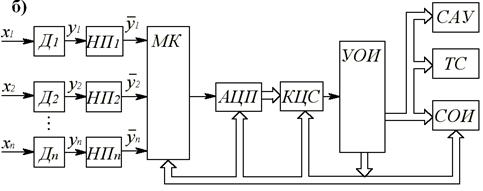
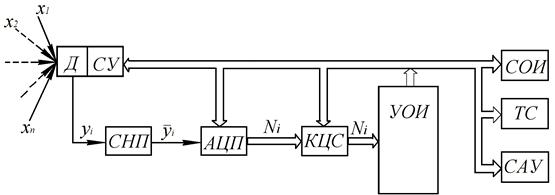
Рис. 1.5. Типовые структурные схемы ИВС: а - с параллельными измерительными каналами; б – с каналами параллельно-последовательного действия; в – с каналами последовательного действия; г - мультиплицированные развертывающие системы, (обозначено Д – датчик (первичный преобразователь); НП – нормирующий преобразователь; АЦП – аналого-цифровой преобразователь; КЦС – канал цифровой связи (порты ввода); УОИ – устройство обработки информации; УИ – устройство индикации; ТС–технические системы; СОИ–система отображения информации; СС–схема сравнения; УФОВ–устройство формирования образцовой величины
2. Системы параллельно-последовательного действия (рис. 1.5, б), иногда называемые системами с последовательным сбором информации, отличающиеся тем, что выходные сигналы yi датчиков (первичных преобразователей) Д i после согласования и нормирования преобразуются к одному виду, а затем эти сигналы последовательно или по заданному приоритету (или алгоритму) через мультиплексор (коммутатор) МК подаются к общему АЦП и далее через канал цифровой связи (порт ввода) вводятся в устройство обработки информации. В данном варианте построения ИВС существенно снижаются аппаратные затраты и упрощается управление, однако снижается надежность работы и быстродействие.
3. Системы последовательного действия (рис. 1.5, в), называемые часто сканирующими ИВС, содержат один датчик Д, который с помощью сканирующего устройства СУ воспринимает измеряемую величину в различных точках объекта контроля, и за счет этого происходит измерение одного параметра в n точках или n параметров одной физической природы. Достоинством данной системы является простота и малые аппаратные затраты, недостатком – низкое быстродействие из-за суммирования интервалов времени последовательно выполняемых операций измерения, преобразования, передачи измеряемых величин. Кроме того, такая ИВС обеспечивает измерение и обработку только однородных физических величин.
4. Мультиплицированные развертывающие системы) (рис. 1.5, г), отличительной особенностью которых является использование в ее каналах общей образцовой величины. По структуре эти ИВС параллельного действия (рис. 1.5, а), но в каждом из ее параллельных каналов вместо АЦП, устанавливаются схемы сравнения СС i, которые подключены к общему для всех схем сравнения устройству формирования образцовой величины (УФОВ). В течение цикла развертки образцовой величины, например, по линейно-нарастающему во времени закону, регистрируются моменты времени ti совпадения пронормированного значения выходного сигнала yi каждого из датчиков Д i с известным для этого момента значением образцовой величины. В соответствии с моментами времени ti формируются определяемые ими цифровые эквиваленты Ni, которые через каналы цифровой связи (КЦС) вводятся в устройство обработки информации (УОИ). Мультиплицированные ИВС имеют меньшее количество функциональных элементов, чем ИВС параллельного действия при практически одинаковом быстродействии. Их использование особенно эффективно для выявления изолинии (линии, точки которых соответствуют одному и тому же значению измеряемого параметра) при исследовании поля измеряемых величин. Недостатком мультиплицированных ИВС является наличие большого числа схем сравнения и необходимость идентификации (маркировки) выходных сигналов схем сравнения.
Основным принципом интеграции в измерительно-вычислительных системах является решение определенной функциональной задачи, например, обеспечение информацией обо всех высотно-скоростных параметрах полета всех потребителей с требуемой точностью и надежностью.
Как правило, основой интеграции в ИВС является специализированная или универсальная ЭВМ.
Решение функциональных задач ИВС обеспечивается за счет информации, получаемой от различных автономных и неавтономных датчиков, обработки этой информации в УОИ и выдачи сигналов в систему более высокого уровня (измерительно-вычислительный комплекс) и оператору, например, экипажу для принятия ими решений и воздействий на элементы управления самолетом.
Под измерительно-вычислительным комплексом (ИВК) будем понимать совокупность средств (устройств, подсистем и систем), служащих для сбора, передачи и обработки информации, формирования и отображения выходной информации и передачи ее в системы управления контролируемым объектом или процессом и другие технические системы. Основной связующей частью ИВК является управляющий вычислительный комплекс (УВК), образованный совокупностью вычислительных средств. Основным признаком интеграции ИВК является также решение определенной функциональной задачи. Например, авиационные ИВК могут решать следующие задачи:
· пилотажные (определение параметров полета);
· навигационные (определение координат и траектории движения ЛА);
· специальные (опознавание, прицеливание, стрельба и т. п.).
ИВК могут иметь централизованную и децентрализованную (федеративную) структуру.
Определяющим признаком децентрализованного ИВК является наличие в его составе самостоятельно функционирующих систем (например, ИВС), каждая из которых имеет собственные вычислительные средства. Звеньями, обеспечивающими целостность децентрализованной системы являются оператор (экипаж) или, возможно, специализированные ЭВМ – диспетчер, управляющая каждой ИВС в отдельности.
Полностью централизованный ИВК содержит единую для всех источников и потребителей информации многоцелевую ЭВМ. Большое количество функций, различная значимость и возможность одновременного их выполнения делают целесообразным мультипроцессорную организацию такой ЭВМ. В этом случае более эффективнее, чем в рамках децентрализованной ИВК, решаются вопросы взаимодействия функций и упрощается система связи.
Многоцелевая ЭВМ в этом случае может решать следующие дополнительные задачи:
· обобщенную (интегральную) индикацию и управление, обеспечивающих более эффективную связь между оператором (экипажем) и ИВК;
· комплексную обработку информации, в том числе оптимальную фильтрацию выходных данных, вычисление функций, зависящих от величин, формируемых несколькими ИВС;
· централизованный автоконтроль.
При решении этих задач к многоцелевой ЭВМ предъявляются жесткие требования по производительности и надежности.
В последние годы на современных самолетах и вертолетах проявляется тенденция создания интегрального информационного автомата, решающего все пилотажно-навигационные задачи, которая требует интеграции всего бортового оборудования в единый интегральный комплекс. Причем для контроля и сигнализации состояния отдельных приборов и систем также предусматривается комплексная информационная система сигнализации (КИСС), дополняющая пилотажно-навигационный комплекс (ПНК) и образующая вместе с ним так называемый комплекс цифрового стандартного пилотажно-навигационного оборудования (КЦС ПНО).
Слово "стандартный" подчеркивает агрегатный принцип объединения автономных систем, характеризующихся неизменностью функциональных, конструктивных и эксплуатационных характеристик при любом их сочетании.
Слово "цифровой" указывает на то, что весь обмен и обработка информации между автономными приборами и системами осуществляется посредством цифровых сигналов, т.е. сигналов дискретизированных по времени и квантованных по уровню.
|
|
|
Дата добавления: 2014-01-07; Просмотров: 1122; Нарушение авторских прав?; Мы поможем в написании вашей работы!