КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Канатные экскаваторы
|
|
|
|
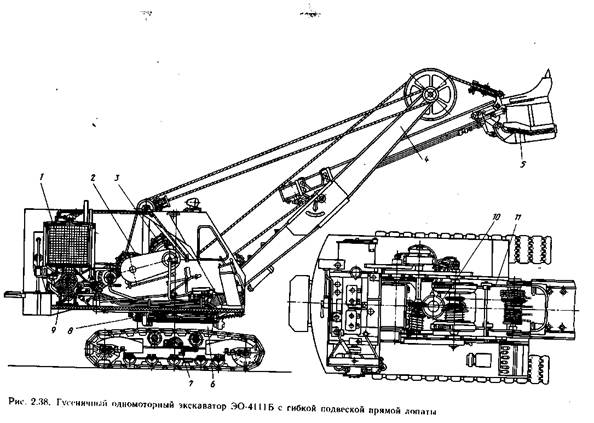
Механические экскаваторы с гибкой подвеской рабочего оборудования выпускают 3-7 размерных групп (ГОСТ 17543-83). Наиболее широко распространенный гусеничный одномоторный экскаватор ЭО – 4111Б с гибкой подвеской прямой лопаты (2.38) имеет следующие основные части:
- поворотную платформу 11 с поворотным механизмом 10,
- ходовую гусеничную тележку 7 с рамой 6, на которой смонтировано опорно-поворотное устройство 8, шарнирно-соединяющее платформу с тележкой.
На поворотной платформе размещены – кузов, двигатель 1, компрессор 9, лебедка главная подъемная 3 и стрелоподъемная 2, рабочее оборудование (стрела, рукоять, ковш 5) механизм привода и кабина с пультом управления. На стреле 4 экскаватора устанавливают сменное оборудование.
В зависимости от вида сменного рабочего оборудования стрелы бывают различные. Обычно стрелу прямой лопаты используют при работе обратной лопаты. Рукояти бывают однобалочные и двухбалочные, прямоугольного, квадратного и круглого сечения.
|
Однобалочные рукояти более просты в изготовлении, и масса их меньше массы двухбалочной рукояти, поэтому такие рукояти применяют на большинстве современных экскаваторов.
Ковши прямой лопаты изготавливают литыми, сборными или комбинированными. Соединение ковша с рукоятью бывает шарнирным
(у большенства экскаваторов) или жестким (у вскрышных экскаваторов). При шарнирном соединении в зависимости от грунта можно изменять угол наклона ковша и рукояти. Режущая кромка передней стенки ковша имеет несколько зубьев, изготовленных из износостойкой стали; некоторые экскаваторы снабжены дополнительными облегченными ковшами, увеличенной вместимости, для работы на легких грунтах.
Для разработки мерзлых и скальных грунтов средней твердости прямые и обратные ковши снабжают зубьями активного виброударного действия. В результате применения ковшей активного действия для разработки мерзлых грунтов почти в 2 раза снижаются трудовые затраты по сравнению с рыхлением мерзлого грунта взрывом.
При работе прямой лопаты возникает необходимость совмещения подъема ковша с поступательным движением рукояти. Эту работу выполняет напорный механизм.
|
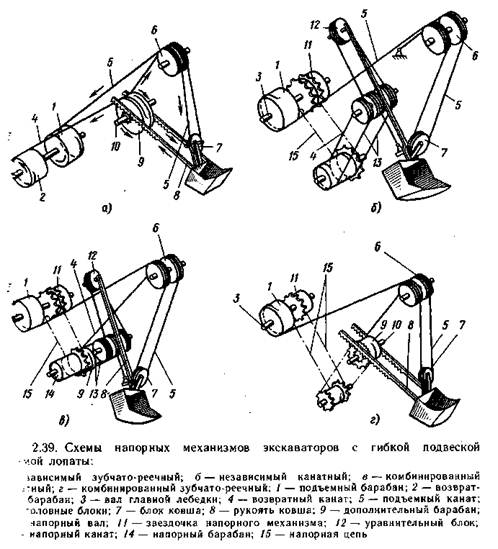
Напорные механизмы одноковшовых универсальных экскаваторов бывают по приводу рукояти канатными и зубчато - реечными, по принципу действия – зависимые, независимые и комбинированные (рис 2.39). Канатный напорный механизм чаще всего применяют при однобалочной рукояти. При двух балочной рукояти устанавливают зубчато- реечный напорный механизм.
При зависимом напорном механизме поступательное движение рукояти связано с натяжением каната подъема ковша. При таком механизме можно только уменьшать напорное усилие. При независимом напорном механизме поступательное движение рукояти не зависит от натяжения каната подъема ковша.
При совмещении зависимости и независимости напорных механизмов (комбинированном напорном механизме) напорное усилие зависит от силы натяжения каната.
Наиболее распространен комбинированный механизм напора (рис 2.39 в,г). При меньшей нагрузке двигателя он обеспечивает плавную работу и почти автоматическое выдвижение ковша, что создает условие лучшего его заполнения.
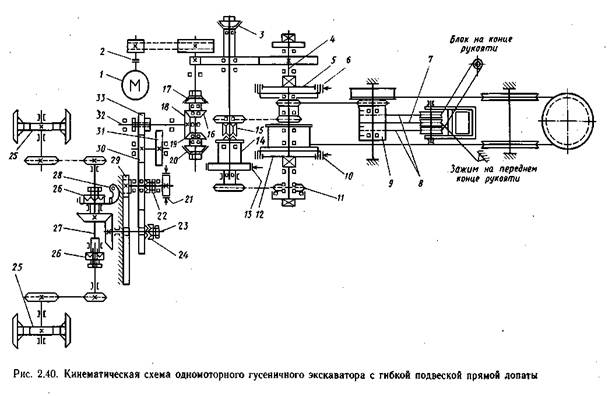
Кинематическая схема гусеничного одномоторного экскаватора ЭО- 4111Б с гибкой подвеской прямой лопаты приведена на рис 2,40. Движение от двигателя 1 к рабочим механизмам передается цепными и канатными передачами при наличии главной муфты 2 и соответствующих кулачковых 15,22,24,26 и фрикционных 3,5,12,17,20 муфт. Для удержания ковша, рукояти и стрелы в определенном положении, а так же для предотвращения вращения поворотной платформы при передвижении экскаватора, установлены ленточные тормоза 6,10,13,21.
Механизм подъема стрелы может работать независимо от механизма поворота платформы или одновременно с ним. Во избежание падения стрелы при резком растормаживании или выходе из строя тормоза 12 предусмотрено противообгонное устройство, состоящее из звездочки, жестко соединенной с барабаном 14, и цепи, соединяющей эту звездочку со звездочкой 11 противообгонной муфты. При опускании стрелы, когда частота вращения звездочки 11 и вала 4 будут равны, противообгонная муфта срабатывает: при этом скорость опускания стрелы ограничивается частотой вращения вала главной лебедки.
Реверсивное вращение механизмов поворота платформ и передвижения машины осуществляется коническими шестернями 16,18 и 19 и двухконусными фрикционными муфтами 17 и 20. От вертикального вала 32 движение передается к обегающей шестерни 29 или к ведущим колесам 25 гусеничного хода. Кулачковые муфты 22 и 24 не могут быть включены одновременно и поэтому от вала 32 движение может быть передано на поворотный вал или на вертикальный вал 23 механизма передвижения машины. Следовательно, поворот платформы невозможно совместить с передвижением экскаватора.
|
Механизм поворота платформы и передвижения машины работают на двух скоростях. Достигается это соединением сдвоенной шестерни 33 с шестерней 31 (малая скорость) или 30 (большая скорость): на малой скорости платформа поворачивается при работе с крановым оборудованием, на большой- при работе с землеройным оборудованием.
При копании ходовое оборудование экскаватора должно быть неподвижно, чтобы исключить непроизвольное движение машины. Обеспечивается это двусторонним управляемым стопором 28, который удерживает от вращения горизонтальный вал 27 механизма передвижения и обе гусеничные ленты.
Рабочее оборудование прямой лопаты оснащено канатным механизмом комбинированного типа. При вращении барабана 9 на его снизу наматываются оба конца напорного каната 8, а с верхней части барабана сматывается возвратный канат 7. Задний конец рукояти подтягивается к седловому подшипнику, и ковш начинает внедряться в грунт. При вращении барабана 9 в обратную сторону на него навивается возвратный канат 7 и разматывается напорный канат 8 т.е происходит возврат рукояти.
Барабан 9 вращается как при включении фрикционных муфт 3 и 5, так и при растормаживании тормоза 6, когда включен подъем ковша. В последнем случае подъемный канат будет разматываться с дополнительного барабана, который жестко соединен с напорным барабаном 9, и вращать его.
В одномоторном экскаваторе ЭО 3311Г на пневмоколесном ходу (рис 2,41) дизель установлен вдоль оси машины. Движение от дизеля 4 к трансмиссии экскаватора передается через главную муфту 5 с помощью конической передачи 7. Вал 9 главной лебедки состоит из 2 частей, из которых одна получает вращение через шестерни 11 и 8, а другая – через шестерни 22,21 и 2. Шестерни 21 и 2 а так же 8 и 14 находятся в зацеплении между собой. Благодаря такой кинематической цепи обе части вала такой лебедки и оба шкива фрикционов 12 и 20 реверсивного механизма вращаются в разные стороны, вследствие чего изменяется направление вращения поворотной платформы, направление движения экскаватора или направление вращения барабана, подъема крановой стрелы. Шестерни 19, жестко установленные на валу 13, служат для изменения скорости при соединении их с блоком 17 шестерен. Зацепление подвижной шестерни 15 с шестерней 10 дает возможность получать две транспортные нереверсивные скорости.
|
Таким образом, экскаватор имеет 4 скорости передвижения и 2 скорости поворота платформы. Две скорости передвижения могут быть использованы только при движении вперед. Во время переезда по хорошей дороге передний мост выключают специальной рукояткой находящейся под ходовой рамой.
Шестерни 2,7,8,10,11,14,15,16,17,19,21 и 22 заключены в закрытую масляную ванну и составляют главный редуктор экскаватора. На верхней части редуктора установлена одновальная главная лебедка с тяговым 6 и подьемным 1 барабанами. Фрикционы лебедок и реверсивного механизма, за исключением фрикциона 3, расположены на консольных частях валов, что создает удобство при монтаже и эксплуатации. Для фрикционов лебедок и фрикционов реверсивного механизма на экскаваторе применены пневмокамерные муфты.
Кинематические схемы одномоторных экскаваторов отличаются большим разнообразием. Лучшей считают ту схему, которая при наименьшем числе кинематических элементов обеспечивает нужную частоту вращения платформы и скорость передвижения экскаватора, независимый привод стрелоподьемного барабана, возможность принудительного опускания груза на режиме дизеля, наименьшие потери при передаче мощности от дизеля, к главной лебедке и механизму поворота платформы.
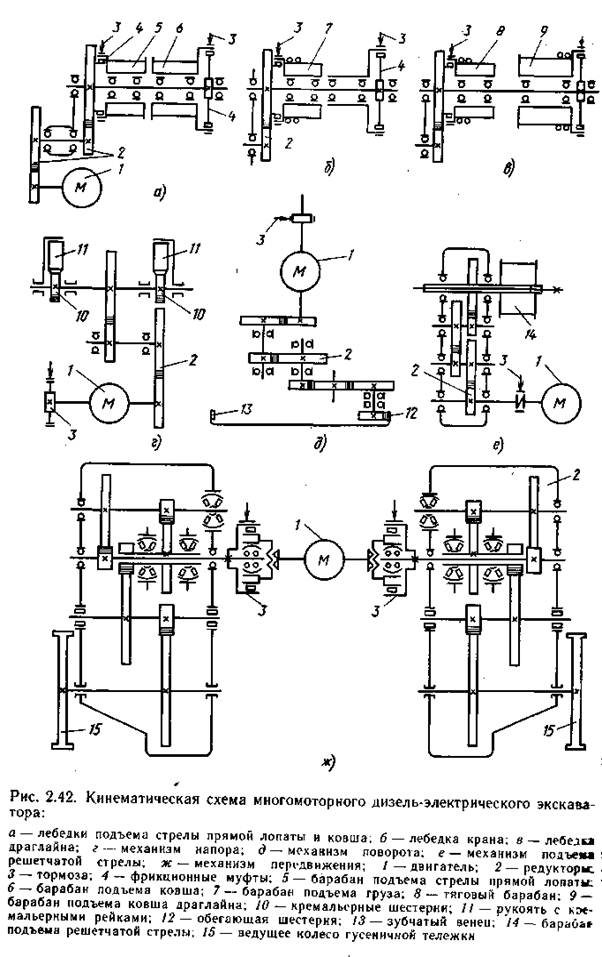
КИНЕМАТИЧЕСКИЕ СХЕМЫ МНОГОМОТОРНЫХ ЭКСКАВАТОРОВ принципиально отличаются от кинематических схем одномоторных машин. У них каждый из механизмов имеет отдельную трансмиссию, приводимую в движение от отдельного двигателя. Примером этому служит экскаватор ЭО-2505БХЛ-2 (рис. 2.42), имеющий дизель – электрический привод. Для лебедок и механизма поворота платформы на поворотной части машины установлены три электродвигателя (рис. 2.42 а, б, в, д, е). Один двигатель (рис. 2.42.г) расположен на стреле прямой лопаты а второй (рис. 2.42ж) смонтирован на раме ходовой части для привода гусеничных тележек.
Все электродвигатели постоянного тока кранового типа с повышенной перегрузочной способностью и механической прочностью. Для их питания на машине предусмотрены два агрегата, преобразующие электрическую энергию, получаемую от дизеля – генераторной установки или от внешней сети переменного тока, в энергию постоянного тока. Кроме индивидуальных двигателей, все механизмы экскаватора имеют отдельные редукторы. При такой схеме каждый механизм экскаватора вместе с приводом, двигателем монтируют независимо от других узлов машины.
|
Барабаны лебедок включают фрикционными муфтами, а останавливают ленточными тормозами закрытого типа. Направление вращения барабанов осуществляется реверсированием электродвигателей..п.
Ходовое оборудование экскаваторов с механическим приводом одномоторных и многомоторных, различных размерных групп идентично по своей конструктивной компоновке.
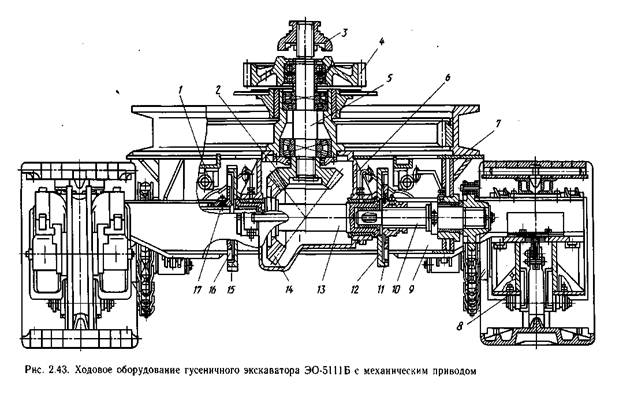
Ходовая рама 7 (рис. 2.43) ходового оборудования гусеничного экскаватора ЭО-5111Б соединена с поперечными балками 9, которые приварены к гусеничным рамам 8.
|
В центре ходовой рамы размещен литой стакан 6, внутри которого установлен вертикальный вал 5 механизма передвижения. Вал 5 приводится в действие от шестерни 4, которая находится в зацеплении с шестерней механизма поворота. Шестерня 4 соединена с валом 5 муфтой 3, перемещаемой по шлицам на валу. Шестерни 2 и 14, жестко закрепленные на вертикальном и горизонтальном валах механизма передвижения, постоянно находятся в зацеплении.
Горизонтальный вал состоит из трех частей: средний 13 и двух концевых 10 и 17 (полуосей). На шлицевых консольных частях полуосей, выходящих за пределы ходовой рамы, укреплены ведущие звездочки цепных передач. К концевым частям средней части 13 вала приварены ведущие неподвижные полумуфты 12 и 15. Подвижные полумуфты 11 и 16 установлены с помощью шлицов на полуосях.
При включении муфты реверсивного механизма полуоси вращаются вместе со средней частью вала и через цепные передачи передают движение ведущим колесам гусеничного хода. Если одну из подвижных полумуфт 11 и 16 переместить в сторону внешнего конца полуосей 10 и 17, то она войдет в зацепление со стопором 1, зацепленным на ходовой раме. Полуось и вместе с ней соответствующая гусеничная лента стопорятся, что необходимо для разворота экскаватора. Наружный обод полумуфты 15 является храповым механизмом стопорного устройства, собачки закреплены на кронштейнах, приваренных к ходовой раме.
Кулачковые муфты и храповой механизм стопорного устройства включают с помощью систем рычагов, приводимых в действие пневматической системой управления.
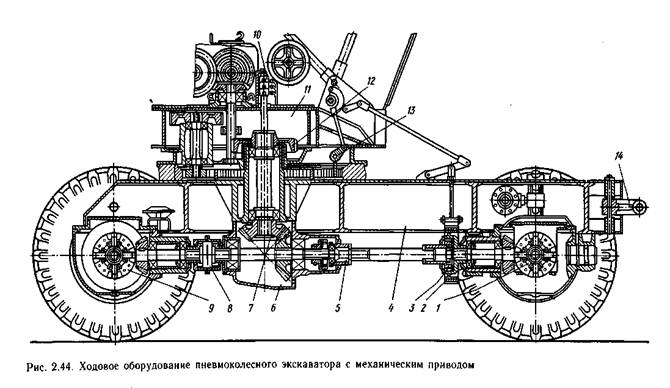
Ходовая рама 4 (рис. 2.44) пневмоколёсного экскаватора ЭО-3311Г с механическим приводом опирается на передний 1 и задний 9 ведущие мосты. Передний мост имеет балансирную подвеску, задний жестко соединён с ходовой рамой. Передний мост включают только при движении по бездорожью. Механизм передвижения приводится в движение от механической трансмиссии, расположенной на поворотной платформе 11.
Вертикальный вал 7 полуосей вращается от шестерни 12 и через конические шестерни редуктора 6 приводит в движение горизонтальный вал. Зубчатые муфты 2, 5 и 8, компенсирующие возможную несоосность валов, соединяют горизонтальный вал с передним и задним мостами. Внутри полого вертикального вала 7 проходят пневмогидроприводы 10, по которым жидкость и воздух под давлением поступают к элементам управления механизмами передвижения.
|
Для передвижения экскаватора с повышенной скоростью на прицепе к тягачу имеется дышло 14. Стопор 13 служит для фиксации поворотной платформы при передвижении или транспортировании экскаватора. Аварийный тормоз 3 используют при буксировании экскаватора тягачом.
На многомоторных гусеничных экскаваторах для привода механизма передвижения устанавливают один или два двигателя, которые через редукторы приводят в движение гусеничные ленты.
|
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 6283; Нарушение авторских прав?; Мы поможем в написании вашей работы!