КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Повышение демпфирования привода с большой инерционной нагрузкой и малым собственным демпфированием
|
|
|
|
Иногда гидравлические приводы, управляющие положением инерционного объекта через упругие конструкционные элементы и (или) установленные на упругом основании обладают малым собственным демпфированием, т.е. повышенной колебательностью процессов управления. Например, понятие о колебательности процессов в выходной части привода, управляющего рулевой поверхностью, показано ниже.
Рис.1.27
Переходный процесс в выходной части привода на силовое воздействие.
Уравнение движения руля:
  0.15...0.2
0.15...0.2
|


 0.05
0.05 1 4
1 4
Логарифмический декремент затухания колебаний и коэффициент относительного демпфирования:
 ;
;  ;
;
Частота демпфированных колебаний руля и собственная частота руля:
 ;
;  ;
;  ;
;  - собственная частота руля.
- собственная частота руля.
Рассмотрим увеличение демпфирования привода, представленного на рис.1.28, выходная часть которого обладает малым демпфированием.
Рис.1.28
Схема привода, управляющего инерционным объектом с учетом упругости узлов крепления привода на летательном аппарате.
Передаточная функция исполнительного механизма гидропривода с инерционной нагрузкой описывается следующим выражением:
 ;
;
Факторы, определяющие демпфирование привода с учетом упругости привода и конструкции узлов его крепления, очевидны из следующего выражения:

В этом выражении Сэ – эквивалентная жесткость привода:
 ,
,
 - собственная частота системы привода.
- собственная частота системы привода.
Жёсткость конструкции узлов крепления привода определяется выражением:
 .
.
Рассмотрим показатели динамики привода с различными вариантами обратных связей: с обратной связью по ускорению инерционного объекта и с обратной связью по перепаду давления на поршне гидроцилиндра.
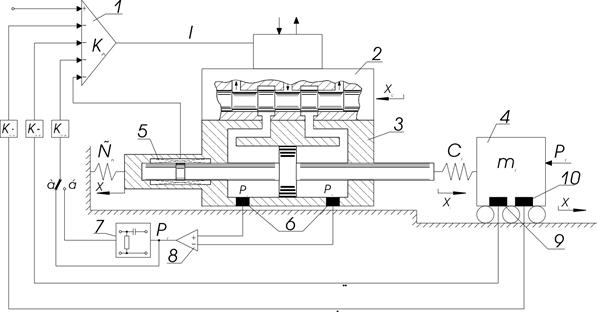
Рис.1.29
Расчетная схема привода различными вариантами обратных связей:
1- усилитель электрических сигналов; 2 – электрогидравлический усилитель мощности; 3 – силовой гидроцилиндр; 4 – инерционный объект; 5 – датчик положения поршня; 6 – условный переключатель с жесткой обратной связи по давлению нагрузки (с коэффициентом передачи КuP) на гибкую обратную связь с фильтром высоких частот (7); 8 – сумматор; 9 – датчик скорости инерционного объекта; 10 – датчик ускорения обратной связи по ускорению (с коэффициентом передачи Кux”).
Если на инерционном объекте установить датчик ускорения инерционного объекта и ввести обратную связь (отрицательную) по ускорению объекта, то схема привода примет вид, показанный на рис.1.29, а передаточная функция разомкнутого привода после замыкания исполнительного механизма обратной связью по ускорению инерционного объекта примет следующий вид:
 ;
;
Дополнительный комплекс, приведенный в скобках в знаменателе передаточной функции, характеризует собой дополнительное демпфирование, вносимое в привод обратной связью по ускорению инерционного объекта:
Рассмотрим теперь вариант привода с обратной связью по перепаду давления на поршне гидроцилиндра (давлению нагрузки).
Передаточная функция разомкнутого привода с такой обратной связью (без фильтра высоких частот 7, а лишь с коэффициентом передачи в цепи этой обратной связи Кup))имеет следующий вид:
 ;
;
Из приведенного выражения очевидно, что при чисто инерционной нагрузке введение обратной связи по перепаду давления на поршне гидроцилиндра эквивалентно введению обратной связи по ускорению инерционного объекта. При этом в приводе также появляется дополнительное демпфирование:
Задаваясь необходимым показателем демпфирования в приводе можно определить требуемый коэффициент обратной связи по перепаду давления на поршне гидроцилиндра:

или в несколько другой форме:
Следует иметь в виду, что введение жесткой обратной связи по давлению нагрузки приводит не только к увеличению демпфирования привода, но и к уменьшению статической жесткости замкнутого контура привода С(0):
Таким образом, при наличии жесткой обратной связи по давлению нагрузки в соответствии с увеличением коэффициента обратной связи по давлению (kup) при увеличении демпфирования уменьшается статическая жесткость привода и под действием внешней силы (статической внешней силы, силы трения и других силовых внешних воздействий) появляется статическая ошибка, а при отработке синусоидальных управляющих сигналов при наличии сил сухого трения в выходной части привода появляется дополнительное фазовое запаздывание в области частот управления, что снижает эксплуатационные свойства привода, как элемента системы управления.
Для исключения влияния внешних сил (Fнв) через канал обратной связи по давлению нагрузки на статику привода и уменьшения влияния этих сил на статическую и динамическую точность отработки управляющих команд привода в цепь обратной связи по давлению необходимо вводить фильтр высоких частот. Схема такого привода показана на рис.1.30.
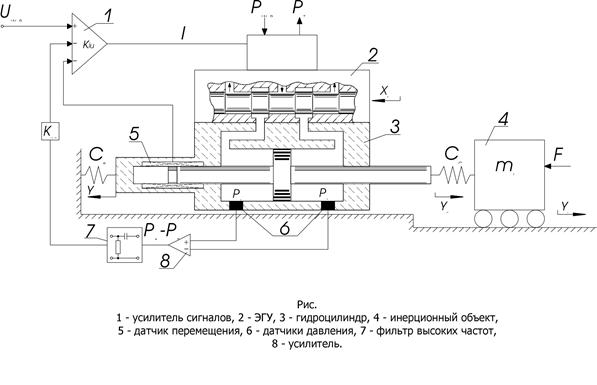
Рис.1.30
При практической реализации обратной связи по перепаду давления на поршне гидроцилиндра (давлению нагрузки) в цепь этой обратной связи необходимо вставить фильтр высоких частот, т.е. устройство, которое пропускает с минимальными искажениями сигналы, пропорциональные перепаду давления нагрузки на собственной частоте привода и на частотах близких к ней частотах, и существенно ослабляющее сигналы низких частот, соответствующих частотам изменения сигналам управления. Указанный фильтр, например, может иметь следующую передаточную функцию:
 ,
,
где wфвч – частота среза фильтра высоких частот. Она выбирается примерно равной половине собственной частоты привода и большей, чем частота изменения управляющего сигнала. Соотношение частоты изменения управляющего сигнала, собственной частоты привода и частоты среза фильтра высоких частот показано на рис.1.31.
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 685; Нарушение авторских прав?; Мы поможем в написании вашей работы!