КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
КД зі змінним магнітним опором
|
|
|
|
Крокові двигуни зі змінним магнітним опором мають кілька полюсів на статорі й ротор зубчастої форми з магнітом’ягкого матеріалу (рис. 7.39). Намагніченість ротора відсутня. Для простоти на малюнку ротор має 4 зубця, а статор має 6 полюсів. Двигун має 3 незалежні обмотки, кожна з яких намотана на двох протилежних полюсах статора. Такий двигун має крок 30°.
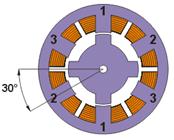 Рис. 7.39. Двигун зі змінним магнітним опором.
Рис. 7.39. Двигун зі змінним магнітним опором.
|  Рис. 7.40. Біполярний та гібридний КД.
Рис. 7.40. Біполярний та гібридний КД.
|
При включенні струму в одній з котушок, ротор прагне зайняти положення, коли магнітний потік замкнуть, тобто зубці ротора будуть перебувати напроти тих полюсів, на яких обмотка підключена до мережі і отримує живлення. Якщо потім виключити цю обмотку й включити наступну, то ротор поміняє положення, знову замкнувши своїми зубцями магнітний потік. Таким чином, щоб здійснити безперервне обертання, потрібно включати фази поперемінно. Двигун не чутливий до напрямку струму в обмотках. Реальний двигун може мати більша кількість полюсів статора й більша кількість зубців ротора, що відповідає більшій кількості кроків на оберт. Іноді поверхня кожного полюса статора виконують зубчастої, що разом з відповідними зубцями ротора забезпечує дуже маленьке значення кута кроку, порядку декількох градусів. Двигуни зі змінним магнітним опором досить рідко використовують в індустріальних застосуваннях.
Біполярні КД з постійними магнітами й гібридні двигуни сконструйовані більш просто, ніж уніполярні двигуни, обмотки в них не мають центрального відводу (рис.7.40).
За це спрощення доводиться платити більш складним реверсуванням полярності кожної пари полюсів мотора.
|
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 839; Нарушение авторских прав?; Мы поможем в написании вашей работы!