КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Поворот двухосного автомобиля с передними управляемыми колесами
|
|
|
|
Поворот колесной машины можно рассматривать в двух характерных режимах движения:
поворот автомобиля, движущегося по горизонтальной опорной поверхности с малой скоростью (статический поворот);
поворот автомобиля, движущегося с большой скоростью (динамический поворот).
Первый режим поворота характеризуется отсутствием центробежной силы, малым боковым ускорением и практическим отсутствием бокового увода колес. Иногда этот режим рассматривают как движение машины, имеющие жесткие, недеформируемые в боковом направлении шины.
Рассмотрим схему поворота двухосной машины с передними управляемыми колесами при качении колес без бокового увода (рис.6).
Обозначим:
Ок - кинематический центр поворота – это центр поворота автомобиля, движущегося по твердой горизонтальной опорной поверхности с пренебрежимо малым боковым ускорением при отсутствии тягового усилия на колесах;
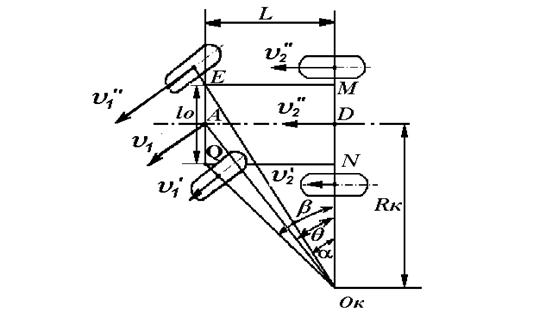
Рис. 6.
 - кинематический радиус поворота;
- кинематический радиус поворота;
 - поступательные скорости центров колес;
- поступательные скорости центров колес;
 - поступательные скорости передней и задней осей автомобиля.
- поступательные скорости передней и задней осей автомобиля.
Для обеспечения чистого качения все колеса автомобиля должны перемещаться вокруг одной точки – точки Ок,, являющейся кинематическим центром поворота. Это условие будет выполняться в том случае, если управляемые колеса переднего моста будут повернуты вокруг шкворней на различные углы  и
и  , а кинематический центр поворота будет находится на продолжении оси задних колес в точке пересечения о прохождением осей передних колес.
, а кинематический центр поворота будет находится на продолжении оси задних колес в точке пересечения о прохождением осей передних колес.
Зависимость между углами и , отвечающая условию идеального поворота, определяется из схемы поворота и должна отвечать условию:
 (4)
(4)
 где
где  - расстояние между осями шкворней поворотных кулаков;
- расстояние между осями шкворней поворотных кулаков;
 - база автомобиля.
- база автомобиля.
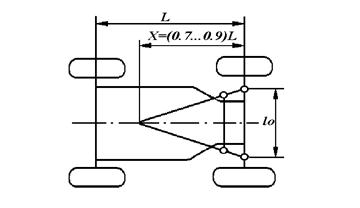
Необходимое соотношение углов поворота управляемых колес, достигается за счет выбора оптимальных параметров рулевой трапеции. На рисунке 7 представлена схема параметров рулевой трапеции.
Основным параметром, характеризующим поворот автомобиля при качении колес без бокового увода, является кинематический радиус поворота ().
Кинематический радиус поворота – это расстояние от кинематического центра поворота до продольной оси автомобиля.
По другому этот радиус может быть назван как радиус поворота автомобиля без учета бокового увода колес.
При качении колес без бокового увода из треугольника АОD (рис. 6) находим:
 (5)
(5)
где θ - средний угол поворота управляемых колес.
 (6)
(6)
где и - углы поворота соответственно внешнего и внутреннего управляемых колес.
Рассмотрим особенности поворота 3-хосного автомобиля (рис. 8).
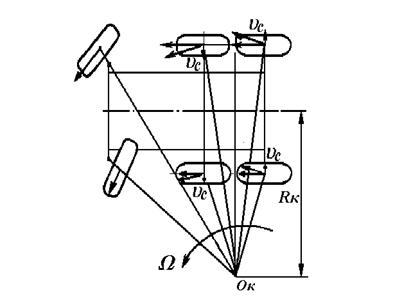 Рис. 8.
Рис. 8.
Особенностью поворота трехосного автомобиля с расстановкой осей по базе 1+2 заключается в том, что кинематический центр поворота расположен на продолжении продольной оси балансирной тележки.
В этом случае предлага-ется, что скольжение про-межуточной оси происхо-дит в направлении центра поворота, а задней оси – от центра поворота.
Таким образом в машинах, у которых не менее двух осей, имеющих неуправляемые колеса, неизбежна либо боковая деформация шин, либо боковое скольжение колес этих осей, либо и то и другое, т.к. иначе невозможно получить мгновенный центр поворота.
|
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 3134; Нарушение авторских прав?; Мы поможем в написании вашей работы!