КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Аналитические методы
|
|
|
|
План ускорений
При ω 1 = const:
 , т.к.
, т.к.  но
но 
Решение: векторный замкнутый многоугольник
 (4)
(4)
 (5)
(5)
Здесь:  ;
; 
Масштабный коэффициент 
PA – полюс плана ускорений

| Угловое ускорение из 1-го многоугольника
 , , 
 (6) (6)
 знаем направление знаем направление
|
Метод позволяет определить угловое ускорение звена 
1) метод векторных контуров
Механизм представляется в виде одного или нескольких замкнутых векторных контуров (это можно сделать т.к. звено, аналогично вектору, имеет величину и направление)
Метод удобен когда необходимо определить угловые параметры: угловое ускорение, скорость, узловые перемещения звена
Дано: l1, l2, l3,l4
ω1 = const; φ1
Найти: φ2 φ3 ω2 ω3 ξ2 ξ3
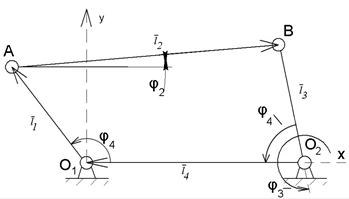
|  (1) (1)
|
Проецируем на оси координат:
На ось х:  (2)
(2)
На ось у:  (3) решая их, найдем φ2 и φ3
(3) решая их, найдем φ2 и φ3
Продиффиринцируем систему помня, что  ;
;  ;
; 
 (4)
(4)
 (5) найдем ω2 и ω3
(5) найдем ω2 и ω3
Дифференцируем 2-й раз, учитывая, что  (т. к. ω1 = const)
(т. к. ω1 = const)
 ;
; 
 (6)
(6)
 (7) найдем ξ2 и ξ3
(7) найдем ξ2 и ξ3
2) Метод преобразования координат (повернутых координат)
Пригоден для определения линейных кинематических параметров характерных точек (в него входит метод векторных контуров; угловые параметры φi ωi ξi известны)
Суть метода: с каждым звеном механизма (включая стойку) связывается (жестко) своя система координат движущаяся вместе со звеном
Обозначим координаты точки S, X22 и Y22 - const (конструктивные параметры) φ2 известно из метода векторных контуров.
Связь между системами координат:
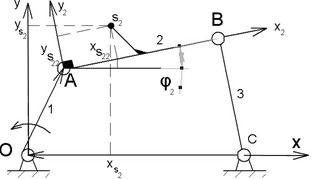
| Обозначим  и и  - -  (именно они определяют положение точек S2 на плоскости) (именно они определяют положение точек S2 на плоскости)
|
Тогда связь между координатами:


Запишем в матричной форме
 (8)
(8)
Дифференцируем (8) два раза последовательно по времени, получим:
 (9)
(9)
 (10)
(10)
(8); (9); (10) позволяют последовательно определить все величины ; ;  ;
;  ;
;  ;
;  и далее определить кинематические параметры следующего звена. Работает только с методом векторного контура, т.к. необходимы угловые параметры.
и далее определить кинематические параметры следующего звена. Работает только с методом векторного контура, т.к. необходимы угловые параметры.
Два последних метода удобны для расчетов на ЭВМ, для расчета «в ручную» они не удобны. Можно перебирать множество вариантов чтобы получить механизм удовлетворяющий выдвигаемым требованиям.
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 361; Нарушение авторских прав?; Мы поможем в написании вашей работы!