КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Тема №3 План скоростей и ускорений
|
|
|
|
О кинематическом анализе (синтезе) рычажных механизмов
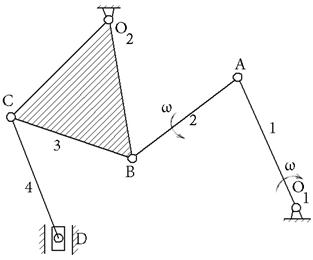
Структурный анализ рычажного механизма
1. Определить подвижность и выделить исходный (главный) механизм
2. Мысленно отделить остающуюся цепь от исходного механизма и разбить на гр. Ассура.
3. Определить класс и порядок каждой группы.
4. Всему механизму присвоить класс и порядок старшей группы.
Синтез осуществляется путем присоединения к исходным механизмам любого числа структурных групп
Задача: определение кинематических параметров механизма (угловых или линейных перемещений, скоростей, ускорений звеньев или отдельных точек)
Замечание: Чем выше класс и порядок механизма тем сложнее его кинематический анализ
Методы:
1. Экспериментальные: дают наиболее достоверные результаты.
Недостатки: требуется лабораторное оборудование (измерительное, регистрирующая аппаратура, образец механизма).
2. Графические: планы механизмов, скоростей, ускорений; графическое интегрирование, дифференциальное и т.д.
Достоинство: простота, наглядность
Недостатки: необходимость выполнения построений графически, с применением чертежных инструментов в масштабе, иногда невысокая точность.
3. Аналитические: не требуют графических построений, обеспечивают сколь угодно точный результат.
Недостатки: громоздкость расчетов.
Дано: ω 1 = 0
Размеры всех звеньев
Определить: Кинематические параметры
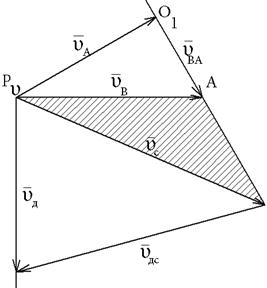
1. План скоростей – геометрическое построение, представляющее совокупность векторов, отображающих скорость любой точки механизма (последовательно определяем линейную скорость и w любой точки и звена механизма)



Как строить план скоростей?
| |
 (1)
┴BO2 ┴DA ┴AB (1)
┴BO2 ┴DA ┴AB
 (2)
┴BO2 0 ┴ BO2 (2)
┴BO2 0 ┴ BO2
| ∆ - изв. величина ↑ - изв. направление Pv – полюс плана (Кv) – масштабный коэффициент плана скоростей |
|  (3)
Вертик. ┴O2C ┴ DC (3)
Вертик. ┴O2C ┴ DC
|
Правила:
1. План скоростей звена является геометрическим местом концов векторов скоростей всех точек данного звена.
2. План скоростей звена подобен звену и повернут по отношению к этому звену на 90 градусов
Зная линейные скорости любых точек определяем угловые скорости любого звена:
 ;
;  ;
;  ; Направление вращения звена, т.е. знак ω 2, ω 3, ω 4 определяется просто
; Направление вращения звена, т.е. знак ω 2, ω 3, ω 4 определяется просто
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 674; Нарушение авторских прав?; Мы поможем в написании вашей работы!