КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Введение
|
|
|
|
Проблема наведения
Наведение – это процесс изменения траектории управляемой ракеты, направленный на уменьшение расстояния между ней и целью. Минимальное расстояние при пересечении траекторий цели и ракеты характеризует точность наведения и называется пролётом. В процессе наведения ракеты сигналы управления строятся по-разному, но в последнее время управление строится на базе прогнозированного значения текущего пролёта — точности наведения, построенного с учётом гипотезы о движении цели. В предположении прямолинейности движения цели текущий пролёт есть вектор, перпендикулярный касательной к траектории ракеты относительно цели и равный по модулю расстоянию от цели до касательной. Отличие поведения цели от её поведения по принятой гипотезе и возмущения, действующие непосредственно на ракету и мешающие точному воспроизведению заданного управления, приводят к необходимости построения замкнутой системы автоматического управления, использующей текущий пролёт в качестве ошибки регулирования. Случайные ошибки измерения текущего пролёта заставляют строить систему наведения как систему статистического оценивания. Таким образом, процесс наведения состоит в измерении относительных координат ракеты и цели, статистическом оценивании текущего пролёта, формировании по нему заданного управления и воспроизведении последнего ракетой. На практике оценивание текущего пролёта удобно заменять оцениванием некоторых величин, связанных с ним линейным оператором, например, оцениванием угловой скорости движения линии ракета — цель, линейного рассогласования и т. д.
Примеры систем наведения
Различают системы автономного наведения, само- и теленаведения. Системы автономного наведения отличаются тем, что координаты цели определяются заранее и в процессе наведения для компенсации начальных ошибок и текущих возмущений используются только измерения абсолютных координат ракеты. В системах самонаведения относительные координаты цели измеряются устройством, установленным непосредственно на борту ракеты — головкой самонаведения. В системах теленаведения абсолютные или относительные координаты ракеты и цели измеряются с некоторой вынесенной точки (наземного командного пункта, борта самолёта, корабля и т. д.), по ним оценивается текущий пролёт и формируется сигнал, который передаётся через линию связи в качестве заданного управления на ракету.
Принципы автономного наведения применяются в баллистических и крылатых ракетах, предназначенных для поражения заранее выбранных целей. Здесь для измерения координат ракеты применяются инерциальные системы, корректируемые в случае больших дальности и времени полёта измерениями скорости с помощью доплеровского измерителя или линейных координат сопоставлением, например, высоты полёта с картой местности (крылатая ракета Боинг AGM-86B, США).
Самонаведение используется в большинстве ракет, предназначенных для поражения подвижных целей (самолётов, кораблей), а также излучающих объектов (например, ракеты «Сайдуиндер», США; «Экзосет», Франция).
Теленаведение, применяется главным образом для зенитных ракет, так как на самолёте трудно разместить радиолокационную станцию, обеспечивающую достаточную точность наведения авиационной ракеты. Теленаведение применяется и в случае включения в контур наведения человека-оператора (например, ракета «Булпап», США).
Указанные выше три типа систем наведения в ряде случаев комбинируют. Так, объединение автономного наведения и самонаведения используется в случае применения полуактивных головок самонаведения непрерывного излучения, способных захватывать цель только после удаления ракеты от радиолокационной станции, осуществляющей подсвет цели (например, ракеты «Спарроу», «Феникс», США). В зенитном комплексе конца 80-х — начала 90-х гг. «Патриот» (США) наземная система осуществляет совместную обработку измеренных наземной станцией абсолютных и полученных на борту ракеты относительных координат цели с передачей команд ракете по радиоканалу. В ракете класса «воздух — воздух» AMRAAM (США) используется сложная комбинированная система, включающая систему инерциальной навигации, измеряющую координаты ракеты и осуществляющую автономное наведение ракеты по прогнозируемым данным о движении цели; систему измерения текущих координат цели и передачи их на борт ракеты для коррекции инерциальной системы; систему самонаведения, корректирующую инерциальную систему на конечном участке полёта [1].
Краткая история систем наведения
Управляемые снаряды-ракеты впервые появились в период 1940-45 годов. Связано это с появлением ракет ФАУ-1, 2. В этот же период началась разработка управляемых снарядов-ракет «воздух – море», наводившихся на корабли. Первые же применения управляемых снарядов-ракет выявили их основные преимущества:
- высокая точность при больших дальностях пуска;
- высокая скорость полета ракет с хорошими маневренными характеристиками на траектории, а отсюда малая уязвимость ракет;
- способность доставлять к цели заряды огромной разрушительной силы;
- и, наконец, самое главное – ракеты обладают очень высокой вероятностью поражения цели.
Начавшееся развитие ракет продолжается во всевозрастающих масштабах. Существует большое разнообразие ракет: по типу, назначению, виду управления и т.д. Чтобы иметь возможность быстро ориентироваться среди этого многообразия, займемся изучением существующей классификации ракет.
Прежде всего, возможно разделить все виды летательных аппаратов (ЛА) на «крылатые ЛА» и «бескрылые ЛА». Эти две группы, как видно из названий, отличаются видом ЛА – под видом в данном случае подразумевается, прежде всего, различия в математическом описании ЛА, который является объектом управления.
Надежный перехват современных высокоманевренных воздушных целей мог быть обеспечен только качественно новым оружием, способным поразить цель на большом расстоянии с высокой точностью и надежностью. Таким оружием стали принятые на вооружение в ряде стран управляемые ракеты воздушного боя. Появление их стало возможным на основании бурного развития электроники, радиолокации, создания новых материалов и технологий, теории управления и, конечно, самой ракетной техники.
Первые успехи в создании таких ракет относятся к началу 40-х годов. Так, в СССР уже имелся определенный опыт создания и боевого применения реактивных снарядов, в том числе и с дистанционным управлением. Заметный вклад в процесс создания в ряде стран первых управляемых ракет класса “воздух-воздух” внесли немецкие разработки периода второй мировой войны. В 1942-1944 гг. немецкими фирмами “Хеншель” и “Русталь” было создано несколько вариантов противосамолетных ракет с командной системой управления (по проводам) – Hs-298, X-4, X-7. Наиболее отработанная из них – ракета X-7 – проходила летные испытания с запусками с самолетов Fw-190.
С учетом уже имеющегося опыта первые послевоенные ракеты этого класса делались радиоуправляемыми с самолета-носителя. В СССР это была ракета РС-1У и ее модификации, в США – первый вариант “Спарроу”, в Англии – “Файрфлеш”, во Франции – “Норд 5103”. Однако уже скоро стало очевидным, что телеуправление не является перспективным для ракет этого класса, так как эта система управления вносит строгие ограничения на траекторию движения атакующего самолета после запуска ракеты и отвлекает летчика от пилотирования.
В связи с этим следующим этапом в развитии ракет воздушного боя стало применение головок самонаведения различного типа (радиолокационных, тепловых, оптических). Чаще всего на этом этапе применялись полуактивные радиолокационные и пассивные тепловые (инфракрасные) головки самонаведения. К таким ракетам можно отнести отечественные ракеты Р-8, Р-9, Р-3с, Р-3р, американские “Спарроу-I” AAM-N-2, “Сайдуиндер”, “Фолкон” (GAR-1, GAR-A, GAR-1D), английские – “Файерстрик” и “Ред Топ”, французскую “Матра R510”. Ракеты этого поколения отличаются значительно большей автономностью, что позволяет истребителю намного свободнее маневрировать после запуска ракеты.
Очевидные успехи в области создания управляемого ракетного оружия привели в начале 60-х к полному пересмотру взглядов на роль истребительной авиации и тактику воздушного боя. Воздушный бой по представлению на тот период сводился к наведению перехватчика на цель с наземного пункта управления, обнаружению противника мощной бортовой радиолокационной станцией истребителя-перехватчика и поражению цели управляемой ракетой с предельной дистанции. Дальнейший рост скорости полета самолетов, стремительное совершенствование электронного оборудования привели к замыслу создания полностью автоматизированных комплексов авиационного вооружения, которые позволяли бы самолету-носителю атаковать противника с любого направления и после запуска ракеты (или нескольких ракет) осуществлять полностью произвольный полет, не связанный с необходимостью участвовать в управлении ракетой. Это стало возможным в связи с созданием малогабаритных и сравнительно легких радиолокационных головок самонаведения и высокочувствительных пассивных тепловых головок самонаведения с охлаждаемыми чувствительными элементами. К этому периоду относится и создание комбинированных головок самонаведения (например, радиолокационных в комбинации с тепловыми), которые значительно расширяют условия применения ракеты и существенно повышают вероятность поражения цели.
К середине 70-х годов окончательно сложилось представление о вооружении современного истребителя, состоящего из пушки и набора управляемых ракет различной дальности. Область возможных атак в современном воздушном бою должна окружать самолет противника со всех сторон. Обнаружив цель, истребитель сближается с ней с любого направления до разрешенного для пуска расстояния. Далее, в зависимости от обстановки, летчик может воспользоваться тем или иным видом ракет, а на коротких дистанциях и пушкой. Запуск современной управляемой ракеты может производиться как с традиционного авиационного пускового устройства, так и с катапультной установки, позволяющей до включения двигателя ракеты вывести ее на безопасное расстояние от истребителя-носителя.
Управляемые ракеты нового поколения способны поражать цели в условиях маневренного боя и активного противодействия со стороны противника (активных и пассивных помех). Высокие маневренные свойства ракет (с поперечной перегрузкой до 40 единиц) стали возможными с применением как аэродинамических, так и газодинамических органов управления. Быстрый разгон и высокие скорости полета ракеты обеспечиваются мощной двигательной установкой, в качестве которой, как правило, применяется ракетный двигатель твердого топлива (однорежимный или двухрежимный). Боевое снаряжение ракет воздушного боя представлено боевыми частями осколочного, осколочно-фугасного или стержневого типов. К ракетам этого поколения относятся американские ракеты LCLM, ASRAAM, AMRAAM, LRAAM, ASAALM, и наши отечественные ракеты Р-73, Р-27Р и Р-27Т, Р-27ЭР и Р-27ЭТ, Р-77, Р-33 и др. []
В структуре систем телеуправления ЛА используется сложная техническая аппаратура, такая, как наземные радиолокаторы, пусковые установки, ЛА с различными счетно-решающими и автоматическими устройствами. Область применения систем телеуправления определяет множество критериев эффективности, сводящихся к минимизации стоимости и массы летательного аппарата при условии обеспечения заданной точности управления [].
Глава 1. Классификации летательных аппаратов
1.1 Классификация по назначению летательных аппаратов
При изучении летательных аппаратов (ЛА) используется множество классификаций. Например, по типу планера (фюзеляжа): бесхвостка, утка, “тарелка” или диск, моноплан, биплан и т.д. Или по типу двигателя: поршневые, реактивные, которые в свою очередь имеют ряд подгрупп. На рис. 1.1 представлена наиболее полная классификация ЛА и по их назначению. Поскольку в дальнейшем в этом пособии будем изучать ракеты военного назначения, рассмотрим еще одну классификацию ракет.
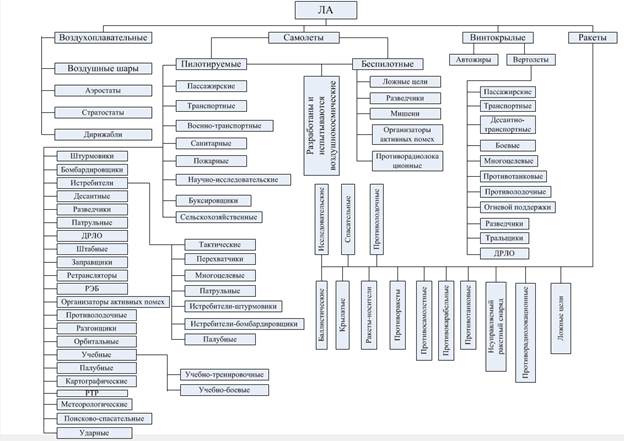
Рис. 1.1 Классификация ЛА по назначению.
1.2 Классификация ракет с оперативно-тактической точки зрения
Эта классификация, схема которой показана на рис. 1.2, появилась в конце 1950 года, когда начала бурно развиваться военная ракетная техника. В основу этой классификации положено место старта ракеты и место положения цели. Назвали эту классификацию оперативно-тактической. Но вскоре и эта классификация претерпела изменения. Появились ракеты с расположением старта и целей на поверхности воды и под водой. Например, ракеты с наименованием “земля-поверхность”, “земля-вода”, стартуя на земле, поражают цель в виде корабля и подводной лодки. Но в последнее время часто используются выделенные “места”: “земля”, “воздух”, “корабль”, “подводная лодка”, “космос”. В этом случае получается следующая классификация:
- “земля-земля”, “земля-корабль”, “земля-подводная лодка”, …
- “воздух-воздух”, “воздух-земля”, “воздух-корабль”, “воздух-подводная лодка”, …
и т.д.
Таким образом, классификация претерпевает постоянные изменения.
Классифицируя крылатые ЛА, можно составить вторую таблицу «беспилотные ЛА», баллистические ракеты, спутники – различного рода по назначению: определение погоды, ретрансляторы, исследовательские, навигационные, вспомогательные ЛА – для спасения экипажа космического корабля, спутники для сборки крупных космических кораблей и т.д.
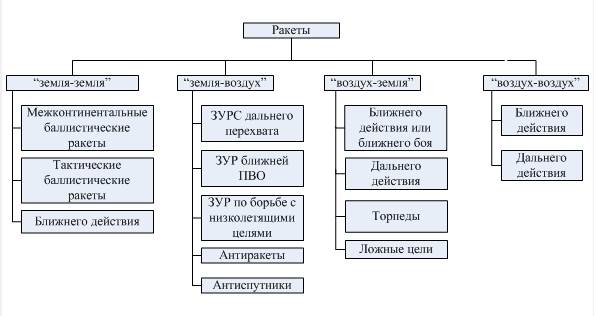
Рис. 1.2 Классификация ракет
1.3 Классификация по способу образования команд управления (виду управления).
1.3.1. Автономные системы или автономное управление.
1.3.2. Телеуправляемые системы или телеуправление.
1.3.3. Самонаводящиеся системы или самонаведение.
1.3.4. Комбинированные системы или комбинированное управление.
Эта классификация наиболее близко характеризует системы наведения. Поэтому остановимся на них более подробно.
1.3.1. Автономные системы.
Автономным называется такое управление полетом, которое осуществляется без использования информации командного пункта (КП) и цели. Под КП подразумевается пункт, с которого запускается ракета совместно с оборудованием запуска, управления и контроля ракеты. В этом случае траектория полета определяется заранее и поэтому такое управление можно осуществить или по неподвижным целям или, в крайнем случае, по малоподвижным целям, перемещение которых можно прогнозировать заранее.
В состав автономных систем входят следующие приборы и комплексы:
а) Автономные гироскопические системы – системы, в основу которых положено свойство гироскопа сохранять свое положение в пространстве. Поэтому возможно построить опорную систему координат, относительно которой измеряются угловые отклонения ракеты. С помощью сигналов отклонения углов тангажа, курса и крена можно их как стабилизировать так и управлять с помощью специальных программ.
б) Автономные инерциальные системы.
Датчики ускорений располагаются так, чтобы их оси чувствительности совпадали с измерительной системой координат (СК). Путем интегрирования можно найти величину скорости и пройденного пути по любому направлению. Траектория проложена в опорной СК, следовательно, для определения текущего значения координат необходимо измерительную СК совместить с опорной.
Достоинства: обе системы измеряют углы или линейные координаты независимо от внешних возмущений (ветра).
Недостатки: накапливание ошибок со временем из-за ухода гироскопов и ошибок датчиков линейных ускорений. Особенно сказывается это при интегрировании, то есть при определении линейных перемещений.
в) Автономные астронавигационные системы.
В этом случае местоположение объекта определяется по измерению углов двух светил из точки расположения ЛА. В качестве светил могут использоваться Солнце, звезды, Луна, Земля. В сущности, на ЛА должны быть два автономных секстанта, расположенные на гиростабилизированной платформе, измерения от которой совпадают с опорной СК.
Достоинства: с помощью секстантов производятся измерения, точность которых не зависит от времени наведения.
Недостатки: точность понижается в случае малого времени наведения.
г) Автономные электро- или магнитометрические системы.
Реагируют на физические параметры среды (магнитное, электрическое и гравитационное поля земли). Частично в упрощенном виде эти системы используются в авиации.
Достоинства: точность измерения не зависит от времени наведения.
Недостатки: сами параметры поля Земли не стабильны в зависимости от возмущений на Солнце.
д) Автономные корреляционные системы. Получили в последнее время широкое распространение. Принцип работы системы состоит в том, что заранее в вычислительное устройство закладывается контур местности вокруг цели или условная карта контура местности, на которых проложен маршрут полета. Тем или иным методом (радиолокационным, телевизионным, инфракрасным лучом или с помощью лазерных лучей) определяется контур или карта местности, над которой находится ЛА. Путем сопоставления заложенного и полученного контуров определяется отклонение ЛА от заданного маршрута и производится управление ЛА таким образом, чтобы полученные “контура” были совместными. Путем увеличения карты местности над целью можно добиться очень малых промахов (KВПЦ около 5 м).
е) Бесплатформеные инерциальные измерительные системы (БИНС). Гиростабилизированная платформа (ГСП), предохраняющая акселерометры от влияния угловых перемещений объекта, имеет ряд недостатков: являясь прецизионным электромеханическим устройством, она ненадежна, потребляет много энергии, имеет большую массу и габариты, сложна при сборке и дорогостояща. Другим способом построения инерциальной навигационной системы является размещение акселерометров и гироскопов непосредственно на борту подвижного объекта, а функции ГСП выполняет бортовое вычислительное устройство. В БИНС используемые чувствительные элементы – акселерометры и измерители параметров ориентации (гироскопы) - могут быть построены на различных физических принцыпах. При этом количество измерителей должно быть таким, чтобы обеспечить получение информции о векторе кажущегося ускорения точки объекта, в которой устовлены измерители, и о векторе абсолютной угловой скорости, характеризующей вращение [].
ж) Автономные комбинированные системы. Для повышения точности наведения автономных систем обычно используется комбинирование упомянутых систем. Например, астронавигационная система:
- с помощью инерциальной системы определяется скорость с довольно высокой точностью, но зато путь (или местоположение) определяется с большой ошибкой;
- астронавигационная система – дополняет инерциальную путем определения и уточнения местоположения ЛА в некоторый момент времени.
Заметим, что почти все автономные системы являются комбинированными системами. Они применяются в баллистических ракетах, ракетах выведения спутников на орбиту и в космических станциях, а также распространены в крылатых ракетах.
1.3.2. Телеуправляемые системы.
Телеуправлением называется управление на расстоянии с помощью специальным образом закодированных сигналов управления (радио, оптических, звуковых и т.д.). Причем, сигналы управления по мощности значительно меньше мощности процессов, которыми они управляют.
В телеуправляемых системах сигналы управления ракетой могут формироваться как на командном пункте (КП) так и на ракете или же совместно КП и ракета.
В системе телеуправления различают:
- Командный пункт (КП).
- Ракету в виде объекта управления (ОУ).
- Линию контроля за целью (ЛКЦ) (канал получения данных о цели).
- Линию контроля за объектом управления (ЛКОУ) (канал передачи данных о полете ракеты).
- Линию управления (ЛУ) (канал управления ракетой).
Примечание: ЛКЦ, ЛКОУ, ЛУ могут быть основаны на различных физических принципах.
Различают два вида телеуправления в зависимости от способа контроля цели:
I вид телеуправления показанный на рис. 1.3, когда КП получает информацию непосредственно от цели.
|
 ЛКЦ
ЛКЦ
|
|

 ЛКОУ
ЛКОУ
ЛУ
Рис. 1.3. Схема I вида телеуправления.
II вид телеуправления изображен на рис. 1.4, здесь ракета получает информацию о цели и передает ее на КП.
|
|

|

ЛУ
Рис. 1.4. Схема II вида телеуправления.
Таким образом, ЛКЦ проходит через ракету (ОУ), а дальше как бы сливается с ЛКОУ на участке от ОУ до КП.
Кроме того при I виде телеуправления различают:
- Командное наведение.
- Наведение по лучу или лучевое наведение. Иногда лучевое наведение называют теленаведением.
- Навигационное наведение.
На рис. 1.5 показана схема командного наведения.
 | |||
 | |||


 ОУ
ОУ



 Ц
Ц




 неуправляемый
неуправляемый


 полет
полет


ЛУ ЛКОУ ЛКЦ





 |
КП
Рис. 1.5. Схема командного наведения.
На вход вычислителя поступают сигналы от цели  ,и ракеты D,
,и ракеты D,  в виде дальностей, углов азимута и возвышения (угол места). Кроме того в вычислитель закладывается метод наведения и «Б» - база между приемниками, которая в некоторых случаях может быть очень большой.
в виде дальностей, углов азимута и возвышения (угол места). Кроме того в вычислитель закладывается метод наведения и «Б» - база между приемниками, которая в некоторых случаях может быть очень большой.
На рис. 1.6 показана упрощенная схема рис. 1.5. В ней нет передатчика, а вместо передатчика на ракете имеется устройство для следования ракеты за лучом. В этой схеме ЛУ и ЛКОУ как бы сливаются.
| |||
| |||
ОУ
 Ц
Ц





 неуправляемый
неуправляемый

 полет
полет
ЛУ ЛКОУ ЛКЦ




 |
 КП
КП
Рис. 1.6. Упрощенная схема при командном наведении.
Наибольшее распространение при подвижном КП получила система теленаведения с помощью одной РЛС, которая получила наименование системы наведения по лучу или лучевое наведение. В такой системе наведения нет вычислителя, а КП отличается простотой реализации и уменьшенными габаритами, что очень важно для мобильного (подвижного) варианта КП. Ее схема показана на рис. 1.7. Здесь, как и в предыдущем случае ЛУ и ЛКОУ сливаются. Команды управления ракетой вырабатываются бортовым вычислительным устройством.
| |||
| |||

ОУ Ц
Ц




 неуправляемый ЛУ
неуправляемый ЛУ
 полет
полет

 ЛКОУ ЛКЦ
ЛКОУ ЛКЦ
КП
Рис. 1.7. Схема наведения по лучу.
В системах телеуправления рис. 1.5, 1.6 КП может быть неподвижным либо подвижным, расположенным на носителе. Самое главное преимущество указанных схем в том, что можно реализовать любую траекторию наведения. В то время как при наведении по лучу можно реализовать только криволинейные траектории.
Рассмотрим II вид телеуправления, схема которого приведена на рис. 1.8.


 КП ЛКОУ, ЛКЦ
КП ЛКОУ, ЛКЦ

 ОУ
ОУ
 | |||||||||
 | |||||||||
 | |||||||||
| |||||||||
 | |||||||||


 ЛКЦ
ЛКЦ
 | |||||||
 | |||||||
 | |||||||
 | |||||||
|

|

 ОУ
ОУ
 | |||||||||||
 | |||||||||||
 | |||||||||||
 | |||||||||||
 |  | ||||||||||




 Оператор обработки
Оператор обработки
 |


|
 |  | ||

 Ц
Ц







 КП
КП
Рис. 1.8. II вид командного теленаведения в случае подвижного носителя.
Здесь КП подвижен и находится на носителе. ЛКЦ проложена как бы через ракету (ОУ). На ракете рис. 1.8 (правая часть рисунка) находится приемник изображения цели (ПИЦ) и передатчик, образующий ЛКЦ. На экране КП с помощью оператора (человека или автомата) совмещается изображение цели с перекрестием, что является сигналом управления, который передается по ЛУ на автопилот (АП) ракеты.
На рис. 1.9 показана одна из возможных схем навигационного телеуправления.
|
ОУ





 неуправляемый
неуправляемый
 полет
полет
ЛКОУ ЛУ


 |
 КП
КП
Рис. 1.9. Схема навигационного телеуправления.
В системе определяют в пространстве координаты ракеты (ОУ). Вычислитель сравнивает координаты ОУ с наперед заданными координатами цели, вырабатывает необходимые команды управления для ракеты. На рис. 1.9 показаны ОУ, КП, ЛКОУ, ЛУ. ЛКЦ в этой схеме отсутствует. Заметим, что к настоящему моменту все страны отказались от навигационного телеуправления.
1.3.3. Самонаводящиеся системы.
Довольно часто самонаводящиеся системы называют одним словом – самонаведение. Самонаведение – это самый точный способ наведения ракеты на цель. Особенно на цели, обладающие высокоскоростными и высокоманевренными характеристиками. Причем, чем дальше ракета удаляется от КП, тем точнее и с меньшей ошибкой летит ракета. Или иначе, в процессе сближения ракеты с целью траектория промаха ракеты все время уменьшается.
Самонаводящаяся система управления полетом целиком и полностью находится на борту ракеты и самостоятельно принимает информацию от цели, обрабатывает ее, получает сигналы управления и производит наведение ракеты на цель.
Аппаратура, принимающая и обрабатывающая информацию от цели для выдачи непосредственно сигналов управления в автопилот, называется головкой самонаведения (ГСН).
Различают следующие виды самонаведения: активное, полуактивное и пассивное самонаведение. Каждый вид самонаведения имеет свои преимущества и недостатки.
При активном самонаведении, показанном на рис. 1.10, ракета с помощью ГСН облучает цель и принимает от нее часть отраженной энергии. Эта информация (энергия) обрабатывается ГСН и выдается в виде сигналов управления автопилоту ракеты.
 | |||||
| |||||
| |||||
 |
Рис. 1.10. Характер получения информации о цели при активном самонаведении.
Преимущества активного самонаведения в следующем:
- после пуска ракеты имеется полная независимость ее движения от КП и носителя. Сам носитель может совершать любые маневры, например, атаковать другие цели или вообще покинуть поле боя;
- проще осуществлять селекцию целей, так как излучатель и приемник находятся в одном месте, что дает возможность в приемнике в качестве образца ввести зондирующий импульс;
- удобно сочетать с другими видами наведения. Например, для системы в целом сочетанием теленаведения или автономного управления на первом этапе полета ракеты достигается дальность действия, а на втором участке с помощью самонаведения – точность попадания.
Недостатки метода:
- велика вероятность обнаружения и уничтожения ракеты, как носителя излучения;
- дополнительная аппаратура излучателя ракеты имеет габариты и массу, что приводит к ухудшению его аэродинамических и точностных характеристик;
- легче создать помехи.
При полуактивном самонаведении с помощью излучателей, расположенных на КП или на самолете-носителе, «подсвечивается» цель. Отраженная от цели энергия принимается, обрабатывается ГСН и передается в автопилот для наведения ракеты. На рисунке 1.11 приведена иллюстрация полуактивного самонаведения.




| |||||
 | |||||
| |||||


Рис. 1.11. Характер получения информации о цели при полуактивном самонаведении.
Преимущества полуактивного самонаведения:
- возможность иметь мощный облучатель на КП и, как следствие, мощный отраженный сигнал от цели, что в результате приводит к увеличению дальности ее обнаружения и наведения;
- упрощается бортовая аппаратура управления ракеты, уменьшаются его вес и габариты, следовательно, улучшаются его маневренные свойства и увеличивается точность наведения.
К недостаткам метода следует отнести следующее:
- легкость обнаружения носителей излучения (КП или самолет-носитель), и следовательно, возрастает вероятность их обнаружения и уничтожения. При этом стоимость уничтоженного носителя значительно выше стоимости ракеты.
- при наведении ракеты ограничивается маневренность носителя, что повышает вероятность его уничтожения.
- легкость создания помех как для носителя, так и для ракеты.
В пассивном самонаведении, показанном на рис. 1.12, ГСН ракеты принимает собственные излучения цели в виде радио, радиолокационных и тепловых (ИК) излучений. Обрабатывая принятые излучения, ГСН выдает в автопилот сигналы наведения. Пассивное самонаведение реализуется в основном на ГСН, принимающих ИК излучения реактивных двигателей самолетов или излучения передних кромок крыла самолета при его полете со сверхзвуковой скоростью. Эти головки называют тепловыми ГСН (ТГСН).
 | |||
 | |||


 |  | ||||||
 | |||||||
| |||||||
Рис. 1.12. Характер получения информации о цели при пассивном самонаведении.
В качестве преимуществ, следует отметить следующее:
- независимость от КП и носителя на этапе наведения ракеты;
- применение простой аппаратуры на борту, по сравнению с активным самонаведением, что в итоге приводит к улучшению массо-габаритных характеристик ракеты, ее маневренных свойств и увеличению точности наведения на цель;
- скрытность применения, так как ракета имеет очень малую энергию излучения для ее обнаружения;
- для пассивных систем сравнительно сложно создать помехи.
К недостаткам относятся:
- малая дальность действия, по сравнению с активным и полуактивным самонаведением;
- не всегда цель излучает полезный сигнал (для тепловых ГСН);
- зависимость качества сигнала о цели от погодных условий.
1.3.4. Комбинированное управление.
Под комбинированным управлением понимается комбинация нескольких видов управления. Комбинированное управление может быть последовательным и параллельным.
Последовательное комбинированное управление – это управление, при котором в процессе полета производится переход с одного вида управления на другой.
Например, для ЗУР дальнего действия, процесс управления может строиться следующим образом:
- автономное или неуправляемое движение при старте;
- теленаведение на средней части траектории;
- самонаведение на последнем участке траектории.
Такая комбинация позволяет обеспечить большую дальность действия ракеты с помощью телеуправления, а благодаря последнему этапу самонаведения достигается большая точность.
Параллельное комбинированное управление – это такое управление, при котором одновременно действуют несколько видов управления.
Например, для баллистической ракеты инерциальное наведение сочетается параллельно с астронаведением.
Для комбинированного самонаведения, могут использоваться и обрабатываться два или более вида энергий. Например, работающие совместно (параллельно) радиолокационная и тепловая ГСН. Такие системы в настоящее время разработаны и, как показали результаты применения, такое сочетание дает не только повышение надежности, но и увеличение точности наведения.
В таблице 1.1 приведена классификация электромагнитных волн и области их применения, в том числе в системах наведения.
Таблица 1.1
| Длина волны, λ | Частота, Гц | Диапазоны волн | Наименова-ния | Способы получения | Применение | |
| В ВПК | В гражданской сфере | |||||
| 1011 м 109 м 106 м 1 км 10 м 1 м 10 дм 1 мм 10 мкм 0,78 мкм 0,36 мкм 1 нм 1 пм | 3·10-3 3·10-1 3·100 3·101 3·102 3·103 3·105 3·107 3·108 3·109 3·1011 3·1013 2,34·1014 10,8·1014 3·1015 3·1017 3·1019 3·1020 3·1021 | Низкочастотные волны | Инфранизкие частоты | Генераторы специальных конструкций | Некоторые ученые полагают, что облучение людей порождает страх | |
| Низкие частоты | ||||||
| При облучении войск они в страхе разбегаются | При облучении можно разгонять любую демонстрацию | |||||
| Промышленные частоты | Генераторы переменного тока 50 Гц, 400 Гц, электрические приборы, двигатели | В основном помехи | В основном помехи | |||
| Звуковые частоты | Звуковые генераторы | В акустических головках самонаведения (АГСН), сигналы тревоги, специальные команды | Используются в электроакустике (микрофоны, громкоговорители) радиовещание, кино, телевидение и т.д. | |||
| Радиоволны | Длинные | Генераторы электрических колебаний различной конструкции | Используются в командах наведения ракет, системах навигации, аппаратуре засекречивания связи | Радиовещание, телеграф, телевидение и т.д. | ||
| Средние | ||||||
| Короткие | Радиолокация | |||||
| Метровые | Специальные высокочастотные генераторы | Радиолокационные станции, определяют: дальность, азимут, угол места цели, скорость. В телевизионных головках самонаведения (РГС λ≈3 см). Обнаружения малозаметных целей. РЛС с возможностью низколетящего полета с огибанием рельефа местности. | Системы определения дальности, скорости цели и т.д. | |||
| Дециметровые | ||||||
| Сантиметровые | Магнетронные, клистронные генераторы и мазеры | |||||
| Миллиметровые | ||||||
| Переходные | ||||||
| Инфракрасные лучи | Декамикронные | Излучение нагретых тел | ИК-обнаружители пуска ракет, ИК-системы ночных полетов, ИК-ловушки. Головки самонаведения (ТСН λ≈1÷8 мкм) | Используются как нагревательные элементы в приборах. В ИК-спектроскопии, фотографии в темноте. | ||
| Микронные | ||||||
| Световые лучи | Звезды, Солнце, ртутные лампы, лазеры | Лазеры, уничтожающие военную технику, ослепления стрелков, целеуказания | ||||
| Ультрафиолетовые лучи | Ближние | Излучение Солнца, ртутных ламп | Использовалось во Вьетнамской войне, пограничные войска | В медицине, в ультрафиолетовых микроскопах | ||
| Рентгеновские лучи | Крайние | Излучение в рентгеновских трубках, а также при торможении электронов | - | Используется в медицине, а также для изучения строения вещества | ||
| Ультрамягкие | ||||||
| Гамма-излучение | Мягкие | Возникает при радиоактивном распаде ядер, при торможении электронов | - | Используются в γ- дефектоскопии, при изучении свойств вещества | ||
| Жесткие | ||||||
| - |
1.4 Классификация по методам наведения.
Основная задача наведения – это встреча ракеты с целью. Поскольку цель в общем случае может менять траекторию, то решение о моменте встречи ложится на управляемое движение ракеты. Из теории стрельбы известно, что попадание в цель имеет вероятностный характер. Поэтому метод наведения определяется как заданная (желаемая) закономерность изменения углового положения вектора скорости ракеты или иначе управляющих сил ракеты при непрерывном сближении ракеты с целью, направленному на уменьшение промаха. От выбора метода наведения зависят характер траектории, функциональные схемы наведения и соответствующая аппаратура. Надо заметить, что основные (основополагающие) методы наведения сложились в конце пятидесятых годов прошлого века. В настоящее время, в результате развития техники измерений и вычислений, методы наведения значительно усложнились. В них реализуются сложные алгоритмы управления, использующие целый ряд параметров, направленных в основном на точность наведения. Более того, используют различные методы наведения на разных этапах полета ракеты. Наконец, все двухточечные методы систем самонаведения применимы в теленаведении для спрямления траектории.
В общем случае, формирование методов наведения осуществляется достаточно точно только при использовании полной системы дифференциальных уравнений наведения. Такой подход современен и соответствует уровню развития теории автоматического управления. Тем не менее, для выбора метода неведения в практике широко используется кинематический анализ (см. Главу 3), где не учитываются уравнения динамики. В этом случае достаточно просто выбирается метод наведения, так как при таком исследовании, движение ракеты точно соответствует выбираемому методу. На этом этапе можно решать задачу по усложнению алгоритмов метода. Например, для компенсации ошибок наведения из-за маневра цели (см. Главу 4).
При формировании методов наведения руководствуются главным образом одним критерием, чтобы траектория ракеты приближалась к прямолинейной траектории. И это не смотря на то, что на искривление траектории действуют очень многие и многие факторы (ошибка пуска ракеты, неравномерная скорость, маневрирование цели, ветер и т.д.). Но одновременно заметим, что иногда для спрямления траектории надо иметь много параметров, засоренных шумами. Тогда при введении производных этих параметров в закон наведения теряется точность наведения, и прямолинейная траектория в этом случае не является наилучшей.
Выделим следующие основные методы наведения:
- Программное наведение
Программный метод наведения заключается в том, что в системе наведения ракеты закладывается программа полета (как правило, функция времени), в процессе полета заданные выходные параметры ракеты сравниваются с фактическими (координаты, скорость, тангаж, курс и т.д.). Их разность и производные в идентичных координатах служат сигналом управления по соответствующему параметру.
- Метод погони.
- Прямой метод наведения.
- Метод параллельного сближения.
- Метод пропорционального сближения или иначе Метод пропорциональной навигации.
- Метод наведения с упреждением.
- Метод трех точек или Метод совмещения или Метод накрытия цели.
- Методы спрямления траектории.
- Методы теленаведения с упреждением.
Очевидно, в методах 8,9 могут использоваться методы наведения 4÷6.
Глава 2. Общие требования, предъявляемые к системам наведения.
Современные системы наведения представляют собой сложный автоматизированный ракетный комплекс, который решает следующие задачи:
- управление пуском;
- управление полетом;
- управление подрывом боевой части.
Управление пуском включает в себя следующие операции: обнаружение цели, определение ее координат, определение момента и направления пуска. Кроме того проводятся различные вспомогательные операции, связанные с подготовкой и проведением пуска, которые для ряда ракет весьма сложны. Управление взрывом большинства ракет производится при помощи неконтактного взрывателя, который производит подрыв ракеты в момент подлета или пролета цели. Наибольшее распространение получили радио и оптические взрыватели. Обычно на таких изделиях предусматривается система предохранительных устройств, окончательно приводящая взрыватель в боевую готовность лишь в полете на безопасном от КП расстоянии.
Кроме того, всегда предусматривается система аварийного взрыва и система самоликвидации ракеты. Аварийный взрыв предусматривается в случае неисправности ракеты после ее старта, если она летит таким образом, что представляет опасность для собственной территории или опасность для каких-либо объектов, расположенных на ней. Аварийный взрыв может быть произведен как с КП, так и автономно. Также самоликвидация ракеты производится после промаха, то есть пролета ее на расстоянии большем необходимого для срабатывания неконтактного взрывателя. Управление пуском ракет и подрывом более тесно связаны со спецификой их военного применения характером боевой части. Здесь эти вопросы рассматривать
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 2189; Нарушение авторских прав?; Мы поможем в написании вашей работы!