КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Сертификация производительности автогрейдера при выполнении планировочных работ
|
|
|
|
U2 v R
"p V "; 2xtg(3xKp и
H = hx - "
+^x(i^)x-&ii,;
2x^xA^
Решение этого уравнения относительно /?«• позволит определить максимальную глубину копания бульдозером при заданной ширине отвала и тяговом усилии тягача. Величина глубины копания в конце процесса набора призмы волочения определится из условия восполнения потерь грунта при сохранении постоянным транспортируемого объёма набранной призмы волочения.
Полученные математические модели можно использовать для разработки алгоритма расчёта и экспериментального определения производительности бульдозера в заданных условиях эксплуатации. В отличие от разработанных и рекомендованных ранее [20] зависимостей определения пути набора призмы волочения бульдозером рекомендованные в настоящей работе зависимости позволяют определять путь набора грунта в призму волочения с учётом изменчивости сопротивления отделения стружки от массива грунта при увеличении призмы волочения.
Исходя из целевого назначения любого технического средства, критерием оптимизации параметров отвала бульдозера следует считать удельные приведенные затраты. Однако учитывая, что стоимость изготовления навесного оборудования бульдозера и затраты на его эксплуатацию по отношению к расходам на конструкцию тягача незначительны, возможно, оптимизацию параметров отвала следует производить по критерию производительности бульдозера. Исходными данными к расчёту являются:
параметры движителя тягача А, В, п, характеризующие свойства опорной поверхности и ходового оборудования при определении коэффициента буксования;
ширина ходового оборудования Вт;
вес тягача GT и коэффициент 0, учитывающий долю веса тягача, приходящегося на ведущие части ходового оборудования (для гусеничного тягача 9=1),
мощность энергоустановки тягача N;
КПД трансмиссии тягача л. от двигателя к ходовому оборудованию,
величина сцепления движителя [у] с грунтом;
максимально допустимые ширина [В] и высота [Н] отвала бульдозера, определяемые конструкцией тягача;
допустимые скорости движения бульдозера при выполнении операций копания[У,,], перемещения [V„] призмы волочения и холостого хода [VT], определяемые возможностями системы управления конструкцией бульдозера и рельефом местности;
характеристика разрабатываемого грунта, определяемая показателями сопротивления перекатыванию f бульдозера, коэффициентами K-i, К2, К3, К4, К5, Кэт, характеризующими сопротивление отделению стружки от грунтового массива при заданных углах установки ножа и отвальной поверхности и размерах кромки затупления ножа, коэффициентами разрыхления грунта Кр, объёма призмы волочения Кпр, учёта потери грунта из призмы волочения К„;
характеристика рельефа местности, определяемая показателем /;
угол р1 наклона траектории движения режущей кромки Отвала к дневной поверхности на участке заглубления отвала в грунт;
величина длины рабочего участка бульдозера /т;
время, необходимое для выполнения дополнительных операций tR;
ДН и ДВ - приращение высоты и ширины отвала.
Задание для самостоятельной работы На основе анализа информации о влиянии параметров бульдозера на его производительность разработать методику производства сертификационного испытания производительности бульдозера. При этом необходимо обеспечить независимость результатов испытаний от квалификации оператора - водителя бульдозера.
Автогрейдер является дорожно-строительной машиной, предназначенной для профилирования и отделки земляного полотна дороги. Кроме того, его применяют для планировки насыпей, выемок и их откосов, формирования и очистки кюветов и каналов, перемешивания грунта или гравия связущими материалами. Автогрейдеры широко используют при летнем содержании и ремонте грунтовых и гравийных дорог, а в зимнее время - для расчистки дорог и аэродромов от снега.
Рабочий орган автогрейдера - отвал - размещен внутри колесной базы машины между передней и задними осями (рис.15). Такое размещение отвала в сочетании с балансирной подвеской задних колес существенно уменьшает вертикальное перемещение режущей кромки отвала при преодолении колесами неровностей, благодаря чему повышаются планирующие качества автогрейдера и уменьшается количество необходимых проходов по одному месту. Идея создания такой конструкции автогрейдера соответствует её основному функциональному назначению - выполнению планировочных работ при создании различных строительных объектов.
Количество проходов автогрейдера по одному месту (п) при выполнении планировочных работ определяет его производительность, зависит от параметров конструкции автогрейдера и характеристики неровностей планируемого земляного полотна. Однако до сих пор нет рекомендаций на определение п, которое в настоящее время назначается на основании данных, полученных из сферы эксплуатации автогрейдеров, что препятствует оценке производственного потенциала этих машин при производстве сертификационных испытаний.
Рассмотрим основные положения теории планирующих машин грейдерного типа [9]. Характер неровностей, на которые воздействует планировщик, представим как эргодический, стационарный процесс с нормальным законом распределения, а планировщик - как нелинейную динамическую систему, которую можно линеанизировать статистическими методами и представить как линейную динамическую систему.
Уравнение рабочего процесса двухосного планировщика
Для вывода уравнения рабочего процесса планировщика грейдерного типа используем расчетную схему, представленную на рис. 13,
где S - абсцисса кромки рабочего органа;
В -длина базы планировщика;
V - расстояние от кромки рабочего органа до задней оси;
F(S) - ордината профиля неспланированной поверхности под передней осью машины, она отнесена к абсциссе кромки рабочего органа;
f(S) - ордината кромки рабочего органа;
f(S-V) - ордината профиля под задней осью;
F,S - внешние воздействия, рассматриваются как случайные величины.
Допущения
Внешние воздействия от образования колеи под передней и задней осями не учитываются.
Динамические деформации конструкции не учитываются, учитываются только воздействия неровностей F(S).
Принимается, что неровности с длиной волны менее радиуса колеса подавляются ими и не учитываются.
Задняя ось движется только по профилю, очерченному кромкой рабочего органа, так как при планировании присутствует процесс опорной срезки неровностей.
Исключено из рассмотрения смещение отвала из опорной плоскости колес (условие прямолинейности ABC).
Составим уравнение рабочего процесса планировщика с учетом прямолинейности линии ABC (рис.13), которое получается при соблюдении следующих положений:
1. При наезде переднего колеса на неровность F(S) режущая
кромка рабочего органа сместится по вертикали на величину
f(S)= F(S)V/B.
2. В то же время при наезде заднего колеса планировщика на не
ровность с абсциссой (S-V), полученную после прохода рабочего ор
гана планировщика, режущая кромка рабочего органа сместится по
вертикали на величину
f '(S)= f(S-V) (B-V)/B.
3. В результате ордината положения режущей кромки рабочего ор
гана планировщика определится суммой
f(S)=f(S)+f(S). Обозначив отношение V/B символом а, получим уравнение рабочего процесса планировщика в следующем виде:
f(S) = aF(S) + (l-a)f(S-V). (1)
Это уравнение дает описание воздействия неровностей не-сплани-рованной поверхности на рабочий орган планировщика. Представим это уравнение в рекуррентном виде, когда один из членов уравнения рабочего процесса определяется последующим уравнением.
f(S) = a-F(S) + (1-a)-f(S-V) (1-a)°
f(S-V) = a-F(S-V) + (1-a)-f(S-2V) (1-a)1
f(S-2V) = a-F(S-2V) + (1-a)f(S-3V) (1-a)2
f(S-nV)= a-F(S-nV) + (1-a)f(S-(n+1)V) (1-a)n
Помножим каждую строку этих уравнений на (1-а)п, где п - номер строки, и просуммируем все строки.
f(S) +(1-a)-f(S-V) +(1-a)2 f(S-2V) +(1-a)3 f(S-3V) +...
+(1-a)n-f(S-nV)=a-F(S)+(l-a)-f(S-V)+a-(l-a)-F(S-V)+
+(l-ct)2 -f(S-2V)+a-(l-a)2-F(S-2V) + +(l-a)3 -f(S-3V) +... +a-(l-a)n-F(S-nV)+...+(l-a)n-f(S-nV)+... В результате получим
f(S) = a^(l-a)n-F(S-n-V) (2)
«=о Для использования полученного уравнения (2) рабочего процесса планировщика необходимо иметь закон изменения неровностей F(S) не спланированной поверхности, который представим в виде гармонического профиля
F(S) = A-Cos~^-S L
где А - амплитуда неровностей; L - длина периода гармонического профиля.
Тогда уравнение рабочего процесса планировщика примет вид
со *\
f(S) = a ■ £(l - a)" -A- Cosl-^— {S - n ■ V)\
Используя формулу косинуса разности углов, можно представить в виде
я=о L L L L
Дальнейшие преобразования с использованием формул тригонометрических рядов [8] позволили получить уравнение рабочего процесса двухосного планировщика в следующем виде:
f(S)=AZX-A-Cos\~-S-<p ф
где
(»■•■•-
<р= arctg ---------------------- -с-----
1 - (1 - а) ■ Cosi—*- ■ V) L
А7Х = = ---------------- = -------- =
Jl- 2 ■ (1 - а) • Cos(— ■ V) + (\-а)г
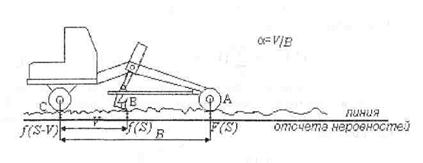
Рис.13. Расчетная схема для получения уравнения рабочего процесса воздействия на неровности планируемой поверхности автогрейдера без балансирных подвесок.
Согласно определениям теории преобразования гармонических процессов дробное выражение перед тригонометрической функцией косинуса называют амплитудно-частотной характеристикой (AZX) средства преобразования (в нашем случае планировщика) гармонических процессов.
В результате получено уравнение рабочего процесса двухосного длиннобазового планировщика с рабочим органом, расположенным внутри базы, которое представляем собой произведение амплитудно-частотной характеристики (AZX) и уравнения, описывающего входное воздействие планируемого профиля с учетом сдвига по фазе ср максимума амплитуды А, определяемого параметрами планировщика V, а и планируемого профиля L.
Уравнение смещения центральной точки балансира
При строительстве дорог для производства планировочных работ земляного полотна и строительных материалов используют автогрейдер с балансирной подвеской задних осей и колесной формулой 6x4x2. Балансиры в конструкции автогрейдера обеспечивают повышение планирующей способности машины. Для учета влияния балансирной подвески на процесс планировки необходимо иметь уравнение смещения центральной точки балансира (см. рис. 14).
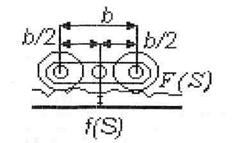
Рис. 14, Расчетная схема к выводу уравнения смещения центральной точки балансира Уравнение смещения центральной точки балансира при движении по рельефу местности, неровности которой представлены функцией F(S), имеет вид
/{S) = ^.[F(S-~)+F(S + ^)]
Введем в это уравнение закон изменения неровностей в виде гармонической функции
F(S) = A-Cos~-^-S Т
тогда
„„_, 1, L-. 2-я' п b. _ 2>jT-,rt b \
f{S)=--A-{Cos ------------------ (S — ) + Los (S+- }
2 { I L 2 J I L 2JJ
„ 2-к os „ 2-я Ьл 2-7z „ „. 2-TV 64
Cos( ----------------- 6) • Cos( ---) + Sm( - S) ■ Sm( --) +
Г / ПЧ - '* - A Li J— ■ Zj JLj La Z*
2 „.2-ж „ _ 2-я b. „. 2-Ti „. 0 .2-я 6,
+Cos( ---------- S) ■ Cos( --) - Sin( -- S) ■ Siri ---)
L L 2 L L T
f(S) = A ■ Cos{2-j- ■ |) ■ Cos(-^- ■ S).
В результате имеем амплитудно частотную характеристику балансира как преобразователя гармонических воздействий в следующем виде:
f(S) = AZXs-A-Cos(—--S) ^^
Уравнение рабочего процесса планировщика с задней балансирной подвеской
Расчетная схема автогрейдера с задней балансирной подвеской представлена на рис.15, а исходное уравнение рабочего процесса по воздействию неровностей не,-спланированной поверхности на положение планирующего рабочего органа имеет вид
f(S) = a-F(S) + AZX8(1-a)-f(S-V).
После представления этого уравнения в рекуррентном виде и соответствующих преобразований
|
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 613; Нарушение авторских прав?; Мы поможем в написании вашей работы!