КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Основные понятия и определения. Число степеней подвижности механизма:
|
|
|
|
КУЛАЧКОВЫЕ МЕХАНИЗМЫ
ЛЕКЦИЯ 11
Решение
Число степеней подвижности механизма:
W = 3 n – 2 p 5 – p 4 = 3∙3 – 2∙3 – 2 = 1,
где n – число подвижных звеньев; p 5 – число кинематических пар пятого класса, p 4 – число кинематических пар четвёртого класса.
Следовательно, рассматриваемый механизм – планетарный.
Для определения передаточного отношения применим метод обращения движения. Пусть в рассматриваемом механизме подвижные звенья вращаются с угловыми скоростями ω1, ωН, ω4. Очевидно, что относительное движение звеньев не измениться, если сообщить всему механизму дополнительное вращение вокруг центральной оси с угловой скоростью – ωН, (то есть, равной по величине, но противоположной по направлению вращения водила). Тогда скорости соответственно изменятся и примут значения:
| Звено. | Фактическая угловая скорость | Частота вращения после сообщения механизму дополнительного вращения |
| Колесо 1 | ω1 | ω1(Н) = ω1 – ωН |
| Колесо 4 | ω4 | ω4(Н) = ω4 – ωН |
| Водило H | ωН | ωН(Н) = ωН – ωН = 0 |
Таким образом, при сообщении всему механизму обращённого движения с угловой скоростью – ωН, водило будет неподвижным, а планетарный механизм превратится в обыкновенный зубчатый механизм (с неподвижными осями).
Передаточное отношение механизма с неподвижными осями
u (Н)14= ω1(Н) / ω4(Н) = (ω1─ ωН)/(ω4 ─ ωН).
Здесь ω1(Н), ω4(Н), ωН(Н) – фактические угловые скорости зубчатого механизма с неподвижными осями вращения, полученного из планетарного.
Для зубчатого механизма с неподвижными осями вращения:
u (Н)14= (─ z 2/ z 1) ∙ (z 4/ z 3);
(ω1─ ωН)/(0 ─ ωН)= ─ (z 2 ∙ z 4)/(z 1 ∙ z 3) т.к. фактически ω4 = 0;
─ ω1/ ωН + 1 = ─ (z 2 ∙ z 4)/(z 1 ∙ z 3), но ω1/ ωН = u 1Н;
u 1Н = 1 + (z 2 ∙ z 4)/(z 1 ∙ z 3) = 1 + (40 ∙ 80)/(20 ∙ 20) = 9.
Знак “плюс” показывает, что входное звено 1 и водило вращаются в одном направлении.
Кулачковым называется механизм, который содержит два основных звена: кулачок и толкатель, образующих высшую кинематическую пару.
Принцип действия простейшего кулачкового механизма представлен на
рис. 7.1. При вращении кулачка 1 с угловой скоростью ω1 толкатель 2 совершает циклическое возвратно-качающееся движение. Постоянный контакт толкателя с кулачком поддерживается пружиной 4. Такой вид замыкания высшей пары называют силовым.
Элементы высшей пары при движении скользят один по другому, что вызывает их износ. В целях уменьшения износа часто вводят ролик (см. рис. 4.2, а, б), который перекатывается по кулачку. Однако при большой быстроходности механизма и высоких температурах ролик может перекатываться по кулачку со скольжением. Тогда целесообразно использовать грибовидные и тарельчатые толкатели (рис. 7.6).
Поверхность кулачка, с которой взаимодействует толкатель – рабочий профиль кулачка (действительный).
Поверхность, проходящая через точку В и отстоящая от действительного профиля на расстоянии радиуса ролика – теоретический профиль.
Рис. 7.1. Кулачковый механизм контроллера: 1 – кулачок, 2 – толкатель, 3 – ролик, 4 - устройство, замыкающее высшую пару (пружина), 5 – контакты.
Достоинства кулачковых механизмов:
· возможность с их помощью воспроизведения широкого класса циклических законов движения ведомого звена, в том числе и с остановками;
· механизмы просты по конструкции, имеют высокий кпд и при необходимости легко перенастраиваются на другой закон движения путем смены кулачка.
К недостаткам кулачковых механизмов относятся:
· большие давления в высшей паре, из-за чего механизм не может передавать значительные усилия и обеспечивать большие перемещения толкателя при высоких частотах вращения кулачка;
· высокая трудоемкость изготовления кулачков со сложным профилем;
· в механизмах необходимо предусмотреть устройство для замыкания высшей пары.
Рис. 7.2. Геометрическое замыкание высшей пары
Постоянство контакта звеньев, входящих в высшую пару, можно обеспечить помощью сил веса или сил упругости пружины (рис. 7.1) – это так называемое силовое замыкание. Благодаря пазовым кулачкам при одном ролике (рис. 7.2, рис. 7.3,б) или двухроликовому толкателю (рис. 7.3, а) со спаренными кулачками осуществляется геометрическое замыкание высшей пары.
Кулачковые механизмы нашли широкое применение в системах газораспределения двигателей внутреннего сгорания, в системах управления электрических цепей (контроллеры), в эскалаторах метрополитена.
В зависимости от характера движения кулачка различают механизмы с вращательным движением ведущего звена (рис. 7.1... 7.5) и поступательным движением (рис..7.6).
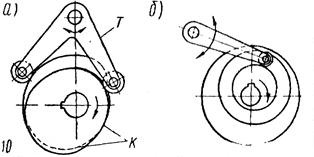
Рис. 7.3. Механизмы с качающимся толкателем и геометрическим замыканием высшей пары
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 546; Нарушение авторских прав?; Мы поможем в написании вашей работы!