КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Лекция №5 Системы каскадного регулирования. АСР с дополнительным импульсом по производной из промежуточной точки
|
|
|
|
Вопросы, рассматриваемые в лекции:
1. Что такое эквивалентный объект в каскадной САР.
2. Объяснение эффективности каскадных АСР.
3. Методы расчета каскадных АСР.
4. Расчет АСР с дополнительным импульсом по производной.
Системами каскадного регулирования называют такие системы, у которых выходной сигнал одного из регуляторов направляется в качестве задания на другой. Основной и вспомогательный параметры объекта подаются соответственно в виде входных сигналов на эти регуляторы. При этом только основной регулятор имеет независимое задание. Выходной сигнал вспомогательного регулятора подается в качестве регулирующего воздействия на объект. Обычно вспомогательный замкнутый контур регулирования, образованный быстродействующей частью объекта и вспомогательным регулятором, находится внутри основного контура регулирования. На рисунке 1.8.1 приведена схема системы каскадного регулирования. Системы каскадного регулирования обеспечивают:
1) быструю компенсацию возмущений, воздействующих на вспомогательный контур регулирования, вследствие чего эти возмущения не вызывают отклонения основного параметра от заданного значения;

1 – основной регулятор; 2 – вспомогательный регулятор; 3, 4 – быстро – и медленнодействующие части объекта
Рисунок 1 - Схема каскадного регулирования
2) существенное уменьшение фазового сдвига в быстродействующей части объекта вследствие образования вспомогательного контура регулирования, что повышает быстродействие основного контура;
3) компенсацию изменения коэффициента передачи быстродействующей части объекта путем изменения коэффициента передачи вспомогательного контура регулирования;
4) требуемую подачу вещества или энергии в объект
Таким образом, системы каскадного регулирования целесообразно применять в тех случаях, когда необходимо поддерживать регулируемый параметр на заданном значении с высокой степенью точности, а также при очень большом запаздывании объекта. Вспомогательный контур регулирования может быть, например, замкнут вокруг интегрирующего элемента объекта с целью преодоления его собственного запаздывания. В качестве вспомогательной переменной можно использовать расход, так как благодаря быстродействию контура регулирования этого параметра предотвращаются значительные отклонения основной регулируемой величины.
Для создания системы каскадного регулирования необходимо предварительно выявить приемлемую промежуточную переменную, что в ряде случаев довольно трудно.
Системы каскадного регулирования расхода используются для непрерывной подачи вещества в объект или вывода его из объекта. Обычно регулирование расхода осуществляется изменением давления воздуха, подаваемого на клапан с нелинейной характеристикой. Если при этом измерение текущего значения параметра выполняется методом переменного перепада давления (при котором выходной сигнал датчика нелинейно зависит от расхода), то обе нелинейности компенсируют друг друга.
Использование метода переменного перепада давления во вспомогательном контуре при регулировании процессов теплообмена или смешения может привести к дополнительным трудностям. Предположим, что регулируемый параметр объекта линеен по отношению к расходу. Выходной сигнал основного регулятора пропорционален перепаду давления, изменяющемуся прямо пропорционально квадрату расхода. Следовательно, коэффициент передачи контура будет изменяться обратно пропорционально расходу. Однако многие процессы необходимо регулировать в момент пуска; кроме того, часто необходимо длительно поддерживать в объекте низкие значения расхода, что довольно сложно. Если основной регулятор не переведен на ручное управление, то в контуре регулирования около нулевого значения расхода возникнут незатухающие колебания. Для того, чтобы этого не произошло, целесообразно включить в линию измерения расхода с целью линеаризации вспомогательного контура устройство для извлечения квадратного корня.
Период колебаний контура регулирования расхода обычно равен нескольким секундам. Поэтому расход в качестве основного параметра в каскадных схемах при регулировании процессов теплообмена или смешения не используют.
При регулировании уровня кипящих жидкостей или конденсирующихся паров применяют системы каскадного регулирования с коррекцией по расходу. В таких системах период собственных колебаний основного контура больше, чем период колебаний контура регулирования расхода.
Системы каскадного регулирования температуры используются довольно широко. При проведении химических реакций для получения высокого качества регулирования выходной сигнал регулятора температуры реактора обычно направляют в камеру задания регулятора температуры хладоагента, т. е. используют схему каскадного регулирования температуры хладоагента по температуре реактора. Интенсивность теплообмена зависит от разности температур реагирующих веществ и хладоагента, поэтому текущее значение температуры хладоагента влияет на процесс.
На работу системы регулирования влияют нелинейности и фазовые сдвиги вспомогательного контура регулирования. Так как в такой системе диапазон пропорциональности вспомогательного регулятора температуры обычно не превышает 25%, то действием астатической составляющей этого регулятора можно пренебречь.
Незначительное перерегулирование по температуре хладоагента не оказывает большого влияния на работу системы, поскольку астатическая составляющая всегда действует в основном контуре. Наличие астатической составляющей во вспомогательном контуре лишь несколько уменьшило бы скорость изменения температуры. При регулировании температуры хладоагента в реакторе периодического действия астатическая составляющая не используется. Обычно при проектировании систем каскадного регулирования основной задачей является определение соотношения периодов собственных колебаний основного и вспомогательного контуров регулирования температуры. Если в обоих контурах использован один и тот же метод измерения, то соотношение между периодами собственных колебаний контуров линейно и, следовательно, коэффициент передачи основного контура будет постоянным.
Расчет каскадной АСР предполагает определение настроек основного и вспомогательного регуляторов при заданных динамических характеристиках объекта по основному и вспомогательному каналам. Поскольку настройки основного и вспомогательного регуляторов взаимозависимы, расчет их проводят методом итераций.
На каждом шаге итерации рассчитывают приведенную одноконтурную АСР, в которой один из регуляторов условно относится к эквивалентному объекту.
Эквивалентный объект для основного регулятора представляет собой последовательное соединение замкнутого вспомогательного контура и основного канала регулирования.
WЭ(p) = [- R1(p) / 1 – W(p)*R1(p) ]* W(p), (1)
где R1(p) – передаточная функция вспомогательного регулятора,
W(p) = W1(p) * W2(p) – передаточная функция объекта
Эквивалентный объект для вспомогательного регулятора является параллельным соединением вспомогательного канала и основной разомкнутой системы.
WЭ1(p) = W1 (p) – W(p)*R (p), (2)
где R (p) – передаточная функция основного регулятора
В зависимости от первого шага итерации различают два метода расчета каскадных АСР.
1-й метод. Расчет начинают с основного регулятора. Метод используют в тех случаях, когда инерционность вспомогательного канала намного меньше, чем основного. На первом шаге принимают допущение о том, что рабочая частота основного контура намного меньше, чем вспомогательного. И тогда:
WЭ(p) = W2 (p). (3)
На втором шаге рассчитывают настройки вспомогательного регулятора для эквивалентного объекта.
В случае приближенных расчетов ограничиваются первыми двумя шагами. При точных расчетах их продолжают до тех пор, пока настройки регуляторов, найденные в двух последовательных итерациях, не совпадут с заданной точностью.
2-й метод. Расчет начинают со вспомогательного регулятора. На первом шаге предполагают, что внешний регулятор отключен. Таким образом, в первом приближении настройки вспомогательного регулятора находят по одноконтурной АСР для вспомогательного канала регулирования из выражения:
WЭ1(p) = W1 (p). (4)
На втором шаге рассчитывают настройки основного регулятора по передаточной функции эквивалентного объекта. Для уточнения настроек вспомогательного регулятора расчет проводят по передаточной функции. Расчеты проводят до тех пор, пока настройки вспомогательного регулятора, найденные в двух последовательных итерациях, не совпадут с заданной точностью.
АСР с дополнительным импульсом по производной из промежуточной точки.
Такие системы обычно применяют при автоматизации объектов, в которых регулируемый технологический параметр (например, температура или состав) распределен по пространственной координате (как в аппаратах колонного или трубчатого типа). Особенность таких объектов состоит в том, что основной регулируемой координатой является технологический параметр на выходе из аппарата, возмущения распределены по длине аппарата, а регулирующее воздействие подается на его вход. При этом одноконтурные замкнутые АСР не обеспечивают должного качества переходных процессов вследствие большой инерционности канала регулирования.
Подача на вход регулятора дополнительного импульса из промежуточной точки аппарата дает опережающий сигнал, и регулятор включается в работу прежде, чем выходная координата отклонится от заданного значения.
Для того чтобы обеспечить регулирование без статической ошибки, необходимо, чтобы в установившихся режимах дополнительный импульс исчезал. С этой целью вспомогательную координату пропускают через реальное дифференцирующее звено, так что входной сигнал регулятора равен e=y+y’1–y0 (рисунок 1.9.1а). В установившихся режимах, когда y’1=0, при e=0, y=y0.
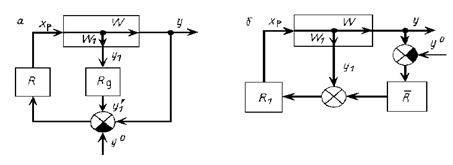
а – исходная схема; б – преобразованная к схеме каскадной АСР
Рисунок 2 - Структурные схемы АСР с дополнительным импульсом по производной из промежуточной точки
Эффективность введения дополнительного импульса зависит от точки его отбора. Выбор последней определяется в каждом конкретном случае динамическими свойствами объекта и условиями его работы. Так, измерение y1 в начале аппарата равносильно дополнительному импульсу по возмущению, которое поступает по каналу регулирования. При этом дифференцирующее устройство играет роль динамического компенсатора возмущения. Измерение y1 на выходе объекта (y1=у) равносильно введению производной от основной координаты. Для каждого объекта можно выбрать оптимальное место отбора дополнительного импульса, при котором качество регулирования оказывается наилучшим.
Расчет подобных систем регулирования аналогичен расчету каскадных АСР после соответствующих преобразований. В приведенной каскадной АСР на рисунке 2 б роль внешнего регулятора играет звено с передаточной функцией Rд-1(p), а внутреннего – последовательно соединенные регулятор и дифференциатор, так что передаточные функции для приведенных регуляторов соответственно равны.
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 7672; Нарушение авторских прав?; Мы поможем в написании вашей работы!