КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Алгоритм составления эквивалентных схем
|
|
|
|
1. Выбирается инерциальная система отсчета. В большинстве инженерных приложений в качестве таковой можно принять землю. Инерциальной системе отсчета в эквивалентной схеме соответствует базовый узел.
2. В подсистеме выделяются элементы, у которых необходимо учесть массу, эти элементы считаются абсолютно жесткими. На эквивалентной схеме такие элементы одним полюсом всегда подключаются к базовому узлу. Все взаимодействия с остальными элементами осуществляются через второй полюс.
3. Между соответствующими узлами включаются элементы упругости и трения.
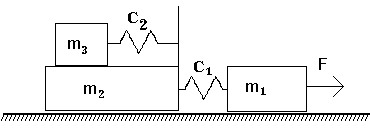
Рассмотрим пример составления эквивалентной схемы для поступательной механической подсистемы представленной на рис.2.
|
Рис. 2.
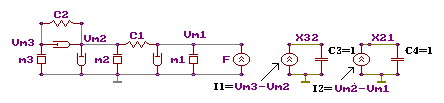
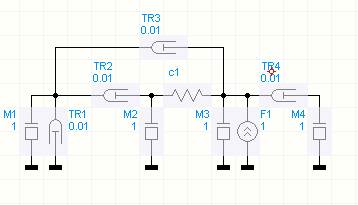
Считаем массы m1 - m3 абсолютно жесткими, пружины С1,С2 - безынерционными. Исходя из этих предположений, эквивалентная схема будет выглядеть как показано на рисунке 3
|
Рис. 3.
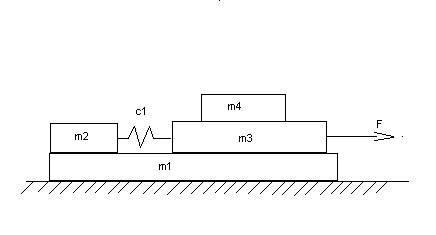
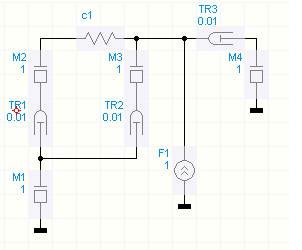
Поскольку элементы С1 и С2 являются нелинейными и изменяют свои параметры в зависимости от смещения концов пружин, удобным представляется ввести в эквивалентную схему два интегратора, состоящих из элементов I1, С3 и I2, С4, позволяющих получить смещения в качестве потенциалов узлов X32 и X21. Эквивалентные схемы для следующей механической поступательной системы изображены ниже:
Моделирование механических объектов на макроуровне имеет свои особенности. Эти особенности проявляются при формировании эквивалентных схем механических объектов.
Для каждой степени свободы строят свою эквивалентную схему. Каждому телу с учитываемой массой соответствует узел схемы (вершина графа). Один узел, называемый базовым, отводится телу, отождествляемому с инерциальной системой отсчета.
Каждый элемент массы изображают ветвью, соединяющей узел, соответствующий массе тела, с базовым узлом; каждый элемент упругости — ветвью, соединяющей узлы тел, связанных упругой связью; каждый элемент трения — ветвью, соединяющей узлы трущихся тел. Внешние воздействия моделируются источниками сил и скоростей.
В качестве примера на рис. 1,a изображена некоторая механическая система — тележка, движущаяся по дороге и состоящая из платформы A, колес B1, B2 и рессор C1, C2. На рис. 1,б приведена эквивалентная схема для вертикальных составляющих сил и скоростей, на которой телам системы соответствуют одноименные узлы, учитываются массы платформы и колес, упругость рессор, трение между колесами и дорогой; неровности дороги вызывают воздействие на систему, изображенное на рис. 1,б источниками силы.
|
Рис. 1. Эквивалентная схема механической системы
|
|
|
|
|
Дата добавления: 2014-01-20; Просмотров: 1136; Нарушение авторских прав?; Мы поможем в написании вашей работы!