КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Эквивалентные схемы механических вращательных подсистем
|
|
|
|
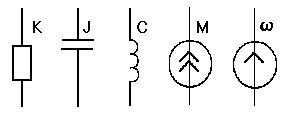
Переменной типа потока является момент силы M, переменной типа потенциала- угловая скорость ω. Простейшие элементы: трение K, момент инерции J, вращательная упругость C, компонентные уравнения которых
M=Kω, M=J , ω=
, ω= ,
,
и источники момента силы и угловой скорости с компонентными уравнениями:
M=M(z), ω=ω(Z), где в качестве Z может фигурировать время или фазовая переменная.
Компонентное уравнение вращательной упругости может быть получено как из уравнения спиральной пружины, так и из уравнения кручения бруса с круглым поперечным сечением. Для линейной спиральной пружины справедливо уравнение: M=Cφ, где φ -угол закручивания пружины. Дифференцируя по времени получим 3-е компонентное уравнение вращательной упругости.
Для бруса с круглым поперечным сечением справедливо уравнение:
M = GJpθ, где М - крутящий момент, G - модуль сдвига, Jp - полярный момент инерции сечения, θ= относительный угол закручивания. Для бруса конечной длины θ=
относительный угол закручивания. Для бруса конечной длины θ= , где φ- угол закручивания, l - длина бруса. Продифференцировав обе части уравнения по времени получим:
, где φ- угол закручивания, l - длина бруса. Продифференцировав обе части уравнения по времени получим:
 =
= , или ω= где C=
, или ω= где C= .
.
Условные изображения на эквивалентных схемах представлены на рис.
Топологические уравнения для механической вращательной подсистемы.
а) уравнение равновесия  (принцип Даламбера для вращательных подсистем)
(принцип Даламбера для вращательных подсистем)
б) уравнение непрерывности  (принцип сложения скоростей)
(принцип сложения скоростей)
|
|
|
|
|
|
Дата добавления: 2014-01-20; Просмотров: 528; Нарушение авторских прав?; Мы поможем в написании вашей работы!