КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Ю. О. Коваленко
|
|
|
|
Время установившегося движения – характеризуется периодическим изменением скорости начального звена около среднего значения рабочей скорости. При этом все кинематические характеристики начального звена (положение кривошипа, его угловая скорость, угловое ускорение) - периодические функции. Кинетическая энергия механизма во времени изменяется также по периодическому закону. Промежуток времени, по истечении которого положение начального звена, его скорость и ускорение, а также кинетическая энергия механизма принимают первоначальные значения и затем начинают периодически повторяться – называют циклом установившегося движения.
3. Время выбега – характеризуется убыванием скорости начального звена от средней рабочей скорости до полной остановки.
На диаграмме (Рис.7.1) использованы следующие обозначения:
 - работа движущих сил и работа сил сопротивления за один полный цикл;
- работа движущих сил и работа сил сопротивления за один полный цикл;
 - угловая скорость начального звена вначале цикла и в конце цикла;
- угловая скорость начального звена вначале цикла и в конце цикла;
 - кинетическая энергия механизма вначале цикла и в конце цикла;
- кинетическая энергия механизма вначале цикла и в конце цикла;
 - время разбега, время установившегося движения, время выбега;
- время разбега, время установившегося движения, время выбега;
 - время цикла установившегося движения.
- время цикла установившегося движения.
В рамке под диаграммой приведено выражение теоремы об изменении кинетической энергии механизма для времени полного цикла (интегральная форма теоремы). Из теоремы следует, что при  >
> приращение кинетической энергии механизма за цикл положительно, т.е. угловая скорость начального звена увеличивается. И, наоборот, при <приращение кинетической энергии за цикл отрицательно, что соответствует уменьшению угловой скорости начального звена. Наконец, при =приращение кинетической энергии за один цикл равно нулю, а, значит, скорости начального звена вначале и в конце цикла одинаковы.
приращение кинетической энергии механизма за цикл положительно, т.е. угловая скорость начального звена увеличивается. И, наоборот, при <приращение кинетической энергии за цикл отрицательно, что соответствует уменьшению угловой скорости начального звена. Наконец, при =приращение кинетической энергии за один цикл равно нулю, а, значит, скорости начального звена вначале и в конце цикла одинаковы.
7.2. Неравномерность движения начального звена. Средняя скорость. Коэффициент неравномерности
Часто на вопрос о характеристиках движения механизма в установившемся режиме работы студенты отвечают: «Это режим работы, при котором все показатели выходят на номинальный рабочий уровень, т.е. стабилизируются».
Это неверный ответ.
Из предыдущего параграфа (п.7.1) следует, что угловая скорость начального звена в установившемся режиме изменяется, т.е. движение начального звена является неравномерным.
В чем же причина такой неравномерности?
Для анализа этого явления решим уравнение (6.29) относительно углового ускорения:
 , (7.1)
, (7.1)
Из (7.1) видно, что угловое ускорение  зависит от ряда факторов. Движение будет равномерным, если обеспечить
зависит от ряда факторов. Движение будет равномерным, если обеспечить  . Возможно ли это на практике?
. Возможно ли это на практике?
Из трех составляющих числителя (7.1) только движущий момент  (момент на валу кривошипа) условно можно считать постоянным [25] и не зависящим от положения начального звена, т.е.
(момент на валу кривошипа) условно можно считать постоянным [25] и не зависящим от положения начального звена, т.е.  .
.
Приведенный момент сил сопротивления и веса  зависит от закона изменения сил полезных и вредных сопротивлений, а также от величины и направления скоростей точек приложения этих сил и сил веса звеньев. Величина этого момента может быть установлена расчетным путем. Известно, что она может изменяться по весьма сложному закону и в весьма широких пределах. Таким образом, ≠
зависит от закона изменения сил полезных и вредных сопротивлений, а также от величины и направления скоростей точек приложения этих сил и сил веса звеньев. Величина этого момента может быть установлена расчетным путем. Известно, что она может изменяться по весьма сложному закону и в весьма широких пределах. Таким образом, ≠ .
.
Третья составляющая содержит приведенный момент инерции механизма  , который является функцией
, который является функцией  и зависит от кинетической энергии звеньев. Сама кинетическая энергия может изменяться от нуля (при полной остановке отдельных звеньев) до некоторого максимального значения. Отсюда следует, что для рычажных механизмов
и зависит от кинетической энергии звеньев. Сама кинетическая энергия может изменяться от нуля (при полной остановке отдельных звеньев) до некоторого максимального значения. Отсюда следует, что для рычажных механизмов  .
.
Обобщив результаты анализа, приходим к выводу, что неравномерность движения начального звена для рычажных механизмов - явление не просто возможное, а скорее – обычное и закономерное.
Причинами неравномерности следует считать:
1) изменение сил сопротивления при движении механизма (смотри, например, график сил трения в поступательной паре ползун-стойка в курсовом проекте);
2) различное влияние сил тяжести звеньев (при опускании центров масс звеньев, силы тяжести являются движущими силами и, наоборот, при их подъеме – силами сопротивления);
3) сложный характер изменения приведенного момента инерции механизма (что означает изменение величины и направления сил инерции звеньев).
Неравномерность движения количественно оценивается по величине коэффициента неравномерности ( ). Коэффициент вычисляется, исключительно, для режима установившегося движения.
). Коэффициент вычисляется, исключительно, для режима установившегося движения.
 Для вывода расчетной формулы введем понятия максимальной, минимальной и средней скорости начального звена.
Для вывода расчетной формулы введем понятия максимальной, минимальной и средней скорости начального звена.
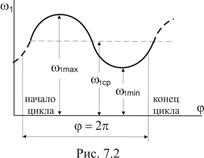
Рассмотрим изменение угловой скорости начального звена за один цикл установившегося движения (Рис.7.2). Наибольшую скорость в цикле будем считать максимальной (w 1max), а наименьшую – минимальной (w 1min). Среднюю угловую скорость звена найдем приближенно, как полу-сумму w 1max и w 1min: [26]
 (7.2)
(7.2)
Коэффициент неравномерности численно определяется отношением амплитуды изменения угловой скорости (w 1max - w 1min) к величине средней скорости w 1ср, т.е.:
 (7.3)
(7.3)
Теоретические пределы изменения  .
.
Нижний предел (т.е. = 0) комментариев не требует. Действительно, при условии w 1max - w 1min = 0 выражение (7.3) дает такой результат. Это режим равномерного движения начального звена механизма, когда w 1max = w 1min = w 1ср. Как показано ранее, этот режим для реальных механизмов является недостижимым идеалом.
Второй предел (т.е. = +¥) трудно объяснить, опираясь на выражение (7.3). Даже если предположить, что w 1min = 0 (это случай максимально большой амплитуды w 1 ) из (7.3) получаем в результате  = 2. Парадокс объясняется тем, что истинное значение средней скорости отличается от вычисленного по (7.2) приближенного значения. Так, например, при кратковременном движении с w 1max и длительной остановке с w 1min = 0 истинная средняя скорость w 1ср будет стремиться к нулевому значению (w 1ср ® 0). Подставив в (7.3) w 1ср = 0, получим правильный результат = +¥.
= 2. Парадокс объясняется тем, что истинное значение средней скорости отличается от вычисленного по (7.2) приближенного значения. Так, например, при кратковременном движении с w 1max и длительной остановке с w 1min = 0 истинная средняя скорость w 1ср будет стремиться к нулевому значению (w 1ср ® 0). Подставив в (7.3) w 1ср = 0, получим правильный результат = +¥.
Неравномерность движения для механизмов и машин - явление нежелательное. Она ведет к появлению целого ряда негативных факторов. Так, возникающие при изменении скорости ведущего звена дополнительные ускорения всех звеньев вызывают добавочные динамические нагрузки в кинематических парах и элементах привода механизма. Кроме того, в связи с неравномерностью могут возникать дополнительные колебания звеньев, отрицательно влияющие на динамику и ресурс работы машины. В силу этих причин, от неравномерности стремятся если не избавиться полностью, то хотя бы уменьшить. Одно из решений в данном случае – установка маховика (см. Лекции по ТММ, Часть 2, Лекция 8).
Значения для некоторых реальных типов машин приведены ниже:
- Насосы, сельскохозяйственные машины, конвейеры......... 0,2¸0,1
- Металлообрабатывающие станки, двигатели внутреннего
сгорания (ДВС)...................................... 0,02¸0,01
- Электродвигатели, генераторы......................... 0,01¸0,005
- Авиационные двигатели, турбогенераторы............ меньше 0,005
Из таблицы видно, что более быстроходным машинам соответствуют меньшие значения коэффициента . И, напротив, для тихоходных машин требования к равномерности движения менее жесткие.
7.3. Диаграмма “Энергия - масса” при установившемся режиме работы. Порядокпостроения.
Диаграмма “Энергия - масса” (диаграмма Виттенбауэра) – графическая зависимость приращения кинетической энергии механизма (Δ ) от приведенного момента инерции (Δ).
) от приведенного момента инерции (Δ).
Диаграмма может быть использована:
- для определения коэффициента неравномерности механизма;
- для подбора маховика с целью снижения ;
- для определения текущего значения угловой скорости начального звена w 1.
Построение диаграммы выполняется в несколько этапов:
Рассматривают 1 цикл установившегося движения (для кривошипно-ползунного механизма в курсовом проекте - j 1ц =2p). Соответствующий циклу угол поворота начального звена делят на  частей, определяя, таким образом, промежуточных положений начального звена (кривошипа). Для этих промежуточных положений начального звена строят планов положений звеньев механизма и планов скоростей его точек. Силы, действующие на звенья механизма, должны быть известны. На планах скоростей должны быть определены скорости точек приложения сил. После строят ряд вспомогательных графиков.
частей, определяя, таким образом, промежуточных положений начального звена (кривошипа). Для этих промежуточных положений начального звена строят планов положений звеньев механизма и планов скоростей его точек. Силы, действующие на звенья механизма, должны быть известны. На планах скоростей должны быть определены скорости точек приложения сил. После строят ряд вспомогательных графиков.
 j Построение графика приведенного к начальному звену момента инерции механизма
j Построение графика приведенного к начальному звену момента инерции механизма  – рис.7.3.
– рис.7.3.
Значения I пр0, I пр1 … I прn определяют расчетным путем для всех положений механизма по формуле (6.21) (см. Лекцию 6, п.6.4).
 k Построение графика изменения приведенного к начальному звену момента сил сопротивления и веса
k Построение графика изменения приведенного к начальному звену момента сил сопротивления и веса  - рис.7.4.
- рис.7.4.
Ординаты графика  определяются для всех положений механизма с использованием рычага Жуковского (см. Лекцию 6, п.6.3).
определяются для всех положений механизма с использованием рычага Жуковского (см. Лекцию 6, п.6.3).
 l Построение графиков работ момента сил сопротивления и веса и движущего момента
l Построение графиков работ момента сил сопротивления и веса и движущего момента  и
и  - рис.7.5.
- рис.7.5.
Построение графиков сводится к графическому интегрированию функций:
 и
и
 .
.
Вторая из функций ( ), часто, не задается. Поэтому график строят без нее, учитывая, что:
), часто, не задается. Поэтому график строят без нее, учитывая, что:
1. Движущий момент принят постоянным, т.е.  ≈;
≈;
2. Работы движущих сил и сил сопротивления за один цикл установившегося движения равны между собой, т.е.  =
= . Это равенство находится в полном соответствии с теоремой об изменении кинетической энергии, т.к. скорости и кинетические энергии механизма в начале и в конце цикла установившегося движения равны (см. выше, п.7.1).
. Это равенство находится в полном соответствии с теоремой об изменении кинетической энергии, т.к. скорости и кинетические энергии механизма в начале и в конце цикла установившегося движения равны (см. выше, п.7.1).
 m Построение графика изменения приведенного к начальному звену движущего момента - рис.7.6.
m Построение графика изменения приведенного к начальному звену движущего момента - рис.7.6.
Движущий момент, приведенный к кривошипу, определяют из условия равенства площадей графиков и за 1 цикл. Этот же график можно построить графическим дифференцированием зависимости (Рис.7.5).
 n Построение графика приращения кинетической энергии Δ
n Построение графика приращения кинетической энергии Δ - рис.7.7.
- рис.7.7.
График Δстроят на основании построенных графиков  и
и  , используя теорему об изменении кинетической энергии:
, используя теорему об изменении кинетической энергии:

 o Построение диаграммы “Энергия - масса”
o Построение диаграммы “Энергия - масса”  – рис.7.8.
– рис.7.8.
Диаграмма строится на базе графиков  и методом графического исключения параметра
и методом графического исключения параметра  . В режиме установившегося режима работы данная диаграмма всегда замкнута.
. В режиме установившегося режима работы данная диаграмма всегда замкнута.
7.4. Определение мгновенной скорости начального звена.
На рис.7.9 приведена диаграмма “Энергия - масса” в двух системах координат: внутренняя система– для механизма без маховика, внешняя  – для механизма с маховиком.
– для механизма с маховиком.
 |
Динамическая модель механизма – вращающийся кривошип. Кинетическая энергия динамической модели:
 ,
,
отсюда:
 (7.4)
(7.4)
При помощи (7.4) можно определить мгновенное значение угловой скорости начального звена для любого положения (т.е. любой точки на диаграмме ). Например, для точки М (Рис.7.9) имеем:
 (7.5)
(7.5)
7.5. Определение ускорения начального звена
Для определения углового ускорения начального звена можно использовать уравнение движения машины, записанное в форме (7.1):
 (7.6)
(7.6)
При этом параметры для вычисления берут из соответствующих графиков для соответствующего положения механизма (угла ):
- из графика - рис.7.6;
 - из графика - рис.7.4;
- из графика - рис.7.4;
 - из графика - рис.7.9 при помощи формулы (7.4);
- из графика - рис.7.9 при помощи формулы (7.4);
 - из графика - рис.7.3 графическим методом;
- из графика - рис.7.3 графическим методом;
 - из графика - рис.7.9.
- из графика - рис.7.9.
При необходимости угловое ускорение  можно определить и другими методами.
можно определить и другими методами.
Вопросы для самоконтроля
1. Назовите основные режимы движения механизмов?
2. Чем с энергетической точки зрения отличаются режимы разбега и выбега?
3. Что называют циклом установившегося движения?
4. Верно ли утверждение «В режиме установившегося движения параметры механизма выходят на номинальный уровень и стабилизируются»?
5. В чем причина неравномерности движения механизма при установившемся режиме работы?
6. Как вычисляют среднюю скорость начального звена при установившемся режиме работы механизма?
7. Как вычисляют коэффициент неравномерности? Каковы пределы его изменения?
8. Назовите приближенные значения коэффициентов неравномерности для сельскохозяйственных машин, металлорежущих станков, турбин. Чем можно объяснить различный порядок этих значений?
9. По какой формуле можно определить мгновенную угловую скорость начального звена, если диаграмма «Энергия-масса» задана?
10. По какой формуле находят угловое ускорение начального звена?
Литература
1. Артоболевский И.И. Теория механизмов и машин: Учеб. для втузов.- 4-е изд. – М.: Наука. Гл. ред. физ.-мат. лит., 1988.- 640 с.
2. Теория механизмов и машин: Учеб. для втузов/ К.В.Фролов, С.А.Попов, А.К.Мусатов и др.; Под ред. К.В.Фролова.- М.: Высш. шк., 1987.- 496 с.
3. Левитская О.Н., Левитский Н.И. Курс теории механизмов и машин: Учеб. пособие для мех. спец. вузов.- 2-е изд., перераб. и дополн.- М.: Высш. шк., 1985.- 279 с., ил.
4. Теория механизмов и машин. Терминология. Буквенные обозначения величин.- М.: Наука, 1984.- Вып.99.
[1] Имеются в виду задачи кинематики и динамики механических систем.
[2] Здесь преобразование материалов понимается как формоизменение, механическая обработка или перемещение объектов, на которые направлено действие машины.
[3] В ТММ под твердыми телами понимают как абсолютно твердые, так и деформируемые и гибкие тела [4]. Другими телами, входящими в состав механизма, могут быть жидкие или газообразные тела (если речь идет о гидравлических или пневматических механизмах)
[4] Неподвижность звена может быть условной (относительной). Так бывает, если корпус механизма установлен на подвижном основании.
[5] В литературе по структуре механизмов стойке обычно присваивают номер «0» (нулевое звено).
[6] Термины «входное звено» и «выходное звено» в литературе по структуре механизмов появились сравнительно недавно. Ранее эти звенья называли соответственно «ведущим» и «ведомым». Введение новых названий стало необходимым по причине их неоднозначной трактовки в задачах структурного и динамического исследования. В задачах структурного анализа ведущим и ведомым звеном называли собственно входное и выходное звенья механизма. В задачах динамики механизмов руководствуются другим подходом. Здесь под ведущим звеном понимают звено, к которому приложены внешние силы, сумма элементарных работ которых является положительной. Эти силы, следовательно, классифицируются как движущие (отсюда название звена – ведущее). При изменении знака элементарной работы внешних сил то же звено попадает в разряд ведомых. Таким образом, термины «входное звено» и «выходное звено» являются более подходящими для исследования структуры механизмов.
[7] Деление кинематических пар на высшие и низшие является условным, т.к. линейный или точечный контакт элементов пар в реальных условиях является невозможным по причине деформируемости элементов.
[8] Чебышев Пафнутий Львович (1821-1894), русский математик, академик Петербургской АН, автор многих научных работ в области прикладной механики, в т.ч. в области теории механизмов.
[9] Формула предложена в 1869 г. для рычажных механизмов с вращательными парами и W=1.
[10] Напомним: Низшие кинематические пары – требуемое относительное движение звеньев получено постоянным касанием элементов звеньев по поверхности. Высшие пары – относительное движение звеньев получено постоянным контактом элементов пары по линиям и в точках.
[11] Ассур Леонид Владимирович (1878-1920), русский ученый, профессор Петербургского политехнического института (ППИ), автор структурной классификации плоских стержневых механизмов.
[12] Работа публиковалась в «Известиях ППИ» с 1914 по 1918 г.
[13] Образованная таким образом геометрически неизменяемая система звеньев называется фермой. Стержневые системы такого рода широко распространены в несущих строительных конструкциях.
[14] Иван Иванович Артоболевский (1905 – 1977) – академик АН СССР, основатель советской школы ТММ, автор многих работ по структуре, синтезу и динамике механизмов. Является также автором учебников и учебных пособий, получивших мировую известность и признание.
[15] Термин «первичный механизм» для обозначения простейшего двухзвенного механизма (стойка + начальное звено) использован в учебнике [2]. И.И.Артоболевский в [1] называет его «механизмом I-го класса». Некоторые авторы первичный механизм называют группой начальных звеньев.
[16] Это звено для данного механизма становится входным, выходным и начальным одновременно.
[17] Это привело бы к потере подвижности группы с образованием жесткого замкнутого контура (фермы) с 3-мя парами. Чтобы группа оставалась подвижной, замкнутый контур, образованный присоединенной группой и другими звеньями, должен содержать не менее 4-х кинематических пар.
[18] Кинематический анализ выполняется поэтапно от первичного механизма к каждой последующей группе Ассура, т.е. соответствует прямому написанию формулы строения механизма. Силовой анализ выполняется в обратном направлении.
[19] Строго говоря, контакт в этих парах в силу неточного изготовления элементов пар и неидеальной их обработки не является поверхностным, а осуществляется в отдельных точках!!! Равно как и в высших кинематических парах, в силу деформируемости материалов, контакт между элементами пар обеспечивается не в отдельных точках и не по линиям, а наоборот - по поверхностям, называемым «пятно контакта»!!! Из этого следует, что признак деления кинематических пар на низшие и высшие является условным.
[20] Как правило, средняя скорость на рабочем ходу устанавливается меньшей, чем на холостом. Это связано с рациональным использованием мощности привода механизма. На рабочем ходу, при большой нагрузке на выходное звено, его скорость намерено уменьшают, получая большее тягловое усилие. И, наоборот, когда необходимость в больших тягловых усилиях отсутствует (на холостом ходу нагрузка на выходное звено уменьшается) среднюю скорость выходного звена также намерено увеличивают.
[21] Вопрос построения планов скоростей и ускорений прекрасно изложен в [3], Глава 2, §4. Настоятельно рекомендуем читателю обратиться к этому источнику при наличии затруднений.
[22] План скоростей для характерных точек механизма будем называть «базовым» планом скоростей.
[23] Зиновьев Вячеслав Андреевич (1899-1975) – предложил общий метод кинематического анализа плоских механизмов (1939), впоследствии обобщенный для анализа пространственных механизмов.
[24] Тахограммой называют графическую зависимость изменения угловой скорости начального звена во времени.
[25] На самом деле и он изменяется в соответствии с механической характеристикой двигателя.
[26] Истинная угловая скорость определяется формулой,
где - угол поворота, - время движения.
ТЕОРІЯ І МЕТОДИКА ФІЗИЧНОГО ВИХОВАННЯ:
|
|
|
|
Дата добавления: 2014-01-20; Просмотров: 492; Нарушение авторских прав?; Мы поможем в написании вашей работы!