КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Типы связей плоских систем
|
|
|
|
Классификация связей
Связи различаются по следующим основным признакам:
1) по области расположения –
а) континуальные – распределённые по объему, поверхности или линии;
б) дискретные – в отдельных точках или сечениях;
Примерами распределённых связей могут служить деформируемое основание – для лежащих на нем балок, пластин, оболочек, вода – для подводных или плавучих сооружений, воздух – при колебаниях высотных объектов; в дальнейшем ограничимся рассмотрением только дискретных связей;
2) по соединяемым дискам связи подразделяются на
а) внутренние – соединяющие диски системы друг с другом;
б) внешние (опорные) – прикрепляющие диски системы к диску «земля»;
3) по числу ограничиваемых перемещений выделяют связи
а) простые (признак – связь накладывает ограничение на одно перемещение);
б) сложные (ограничивается более одного перемещения);
Простые связи различают по типу того одного перемещения, на которое связь накладывает ограничение – линейные и угловые;
4) по физическим свойствам связи бывают
а) жёсткие (недеформируемые);
б) податливые (деформируемые).
Особое значение имеет классификация связей по кинематическому признаку – она будет дана отдельно.
Подробно рассмотрим основные типы дискретных связей плоских систем, не делая различия между связями внешними и внутренними, поскольку для самих связей безразлично, какие диски ими соединяются (при этом диск «земля» принципиально ничем не отличается от прочих дисков системы).
Типы связей устанавливаются по 3-му признаку приведенной выше классификации:
– связи 1-го типа – простые (одно ограничение на перемещения в месте наложения связи) –
а) линейная связь (рис. 1.12) – жёсткий прямолинейный стержень АВ с шарнирами по концам, устраняющий возможность относительного (взаимного) линейного перемещения точки А диска D 1 и точки В диска D 2 по направлению оси связи (линии АВ);
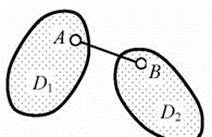
Рис.1.12
б) угловая связь (рис. 1.13, а) в виде недеформируемого стержня А'CВ', объединённого с двумя идеальными (без трения) «ползунами», жёстко прикреплёнными соответственно к дискам D 1 и D 2 в точках А и В и не препятствующими линейным пере мещениям точек А и В вдоль осей ползунов (а значит, и полному взаимному линейному перемещению точек А и В), но не допускающими относительного (взаимного) поворота узлов или сечений дисков-стержней в точках А и В (если деформации дисков не учитываются, то невозможен взаимный поворот дисков в целом); на рис. 6, б показано упрощённое изображение внешней угловой связи (когда диском 2 является «земля»);
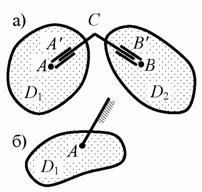
Рис.1.13
– связи 2-го типа – шарниры (два ограничения на перемещения в месте наложения связи) –
а) идеальный (без трения) цилиндрический шарнир (рис. 1.14) с осью вращения, проходящей через точку С перпендикулярно плоскости, в которой расположены диски D 1 и D 2; цилиндрический шарнир допускает относительный (взаимный) поворот дисков D 1 и D 2 вокруг их мгновенного взаимного центра вращения – точки С, но устраняет возможность любых (т.е. одновременно, например, вертикального и горизонтального) относительных линейных перемещений точек дисков D 1 и D 2, через которые проходит ось шарнира;
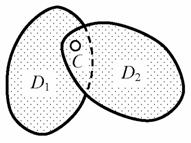
Рис.1.14
б) идеальный (без трения) поступательный шарнир (рис. 1.15) – устройство, состоящее из недеформируемого штока АВ', жёстко прикреплённого к диску D 1 , и направляющей (втулки), закреплённой в точке В диска D 2 ; поступательный шарнир позволяет точкам А и В, принадлежащим соответственно дискам D 1 и D 2 , совершать свободное линейное относительное перемещение вдоль оси шарнира (линии АВ), но не допускает относительного линейного перемещения точек А и В по нормали к линии АВ и взаимного поворота узлов (сечений) в точках А и В (или взаимного поворота жёстких дисков в целом);

Рис.1.15
– связь 3-го типа – припайка (три ограничения на перемещения в месте наложения связи) – жёсткое соединение дисков (рис. 1.16), полностью устраняющее возможность любых (углового и линейных) относительных перемещений в точках А и В соединяемых дисков.
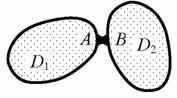
Рис.1.16
Сложные связи 2-го и 3-го типов формально могут рассматриваться как различные комбинации простых связей, обеспечивающие соединение дисков, кинематически эквивалентное соответствующей сложной связи (т.е. с такими же ограничениями на взаимные перемещения дисков). Например, цилиндрический шарнир (рис. 1.17, а) эквивалентен двум линейным связям 1-го типа, каждая из которых одним концом прикреплена к одному из дисков (D 1 на рис. 1.17, б) в точках А и В, а другим – ко второму диску (D 2) в общей точке С.
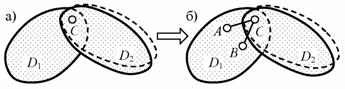
Рис.1.17
Поступательный шарнир (см. рис. 1.15) эквивалентен соединению дисков также двумя линейными связями – параллельными друг другу и ортогональными оси поступательного шарнира (рис.1.18, а).
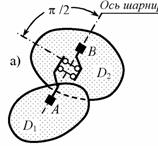
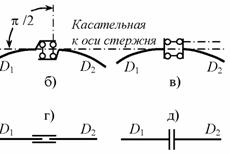
Рис.1.18
На рис. 1.18, б – д показаны различные варианты изображения поступательных шарниров, удобные для использования в расчётных схемах стержневых систем в часто встречающихся случаях, когда оси соединяемых прямолинейных стержней образуют единую прямую, а криволинейные имеют общую касательную в месте соединения. На рис. 1.18, б, г изображены шарниры с осью, совпадающей с продольными осями прямых стержней или с касательной к оси криволинейных стержней – такие шарниры называются продольными поступательными шарнирами. Оси шарниров, показанных на рис. 1.18, в, д, направлены по нормали к осям соединяемых стержней – это поперечные поступательные шарниры.
Припайка (см. рис. 1.16) может быть заменена тремя линейными связями бесконечно малых размеров (рис. 1.19), оси которых не должны сходиться в одной точке или быть параллельными.
Рис.1.19
И наоборот, некоторые комбинации простых связей могут рассматриваться как соответствующие сложные связи. Так, соединение двух дисков двумя линейными связями (рис. 1.20) может быть отождествлено с цилиндрическим шарниром в точке С пересечения направлений осей связей АC' и BC'', так как эта точка является мгновенным взаимным центром вращения дисков D 1 и D 2. Однако нужно иметь в виду, что если бы в точке С был реальный цилиндрический шарнир, то при отсутствии других связей взаимный поворот дисков вокруг точки С был бы возможен на любой конечный угол, а не на бесконечно малый, как в случае мгновенного центра С, когда его положение изменяется с увеличением взаимного поворота дисков. Поэтому шарнир С, условно эквивалентный паре линейных связей, называется фиктивным (правильнее было бы использовать термин «условный шарнир»).
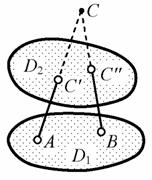
Рис.1.20
Аналогично пара параллельных линейных связей (рис. 1.21) кинематически эквивалентна фиктивному (условному) поступательному шарниру с осью, перпендикулярной осям связей АC' и BC''. Изображение этого шарнира не даёт никаких упрощений, но использование знания его свойств может быть полезным при выполнении кинематического анализа системы. Заметим, что соединения дисков, показанные на рис. 1.20 и 1.21, отличаются только взаимным расположением линейных связей – во втором случае точка пересечения направлений их осей удалена в бесконечность.
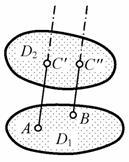
Рис.1.21
В выполненном выше изложении типологии связей плоских систем обсуждались их кинематические свойства. Для полного описания свойств некоторой связи служат её кинематическая и статическая характеристики, первая из которых формулирует ограничения, накладываемые связью на перемещения соединяемых ею объектов, а вторая определяет число и виды составляющих компонентов реакций связи. Согласно принципу двойственности в механике (взаимного соответствия друг другу статических и кинематических величин) каждому ограничению перемещений (кинематическому условию) соответствует статический фактор – реакция определённого вида (сила – если связь препятствует линейному перемещению, или момент – при ограничении углового перемещения).
Сводная информация о типовых связях плоских систем приведена в табл. 1, где показаны варианты изображения связей на расчётных схемах, а также даны их кинематические и статические характеристики. Если один из соединяемых дисков – «земля», то связь – внешняя (опорная); специальные упрощённые изображения даны только для внешней угловой связи и внешнего поступательного шарнира (подвижной защемляющей опоры), в остальных случаях никаких различий в обозначениях внешних и внутренних связей одного типа нет.
Таблица 1
| Тип связи | Наименование связи | Изображение связи на расчётной схеме | Характеристики связи | |
| Кинематическая | Статическая | |||
| Связь 1-го типа | Линейная связь |  
| Не допускает относительного (взаимного) линейного перемещения точек А и В по направлению оси х связи (линии АВ):  .
Не препятствует любым поворотам дисков и относительному линейному перемещению точек А и В по нормали к оси связи .
Не препятствует любым поворотам дисков и относительному линейному перемещению точек А и В по нормали к оси связи
| Реакция связи
– сила* R, направленная вдоль линии АВ (оси связи):

|
| Угловая связь |
Внутренняя
угловая связь
 Внешняя
угловая связь
Внешняя
угловая связь
|
Устраняет возможность относительного (взаимного) поворота соединяемых дисков:
 .
Допускает любые
относительные поступательные перемещения дисков .
Допускает любые
относительные поступательные перемещения дисков
|
Реакция связи – момент* M


| |
| Связь 2-го типа (шарнир) | Цилиндрический шарнир | 
| Не допускает относительного (взаимного) линейного перемещения точек С 1 и С 2 дисков 1 и 2, совпадающих с шарниром С, по любому направлению. Не препятствует любым взаимным поворотам дисков вокруг точки С | Реакция связи – сила* RС по направлению, требующему определения расчётом, или её составляющие RСх и RСу


|
| Поступательный шарнир |

| Устраняет возможность относительного (взаимного) поворота соединяемых дисков и относительного линейного перемещения точек А и В по направлению нормали у к оси х связи (линии АВ):
 Допускает относительное линейное перемещение точек А и В вдоль оси х связи
Допускает относительное линейное перемещение точек А и В вдоль оси х связи
| Реакции связи – cила* Ry,
Нормальная к оси связи, и момент* М


| |
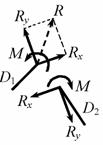
| Связь 3-го типа | Припайка | 
| Не допускает никаких – ни углового, ни линейных – взаимных перемещений дисков. | Реакции связи – cила R c составляющими Rx и Ry и момент*) М.
|
*Две одинаковые по абсолютной величине, но противоположно направленные реакции (силы или моменты) прикладываются одновременно к обоим соединяемым связью дискам, согласно закону действия и противодействия Ньютона в приложении к дискам, взаимодействующим друг с другом посредством связей между ними.
Замечания к таблице 1:
1) в кинематическом анализе статические характеристики связей не используются, но они нужны при выполнении последующего расчёта системы;
2) в случае назначения горизонтальной и вертикальной осей х и у составляющие реакции RCx и RCy обычно обозначаются как H и V соответственно;
3) в описаниях шарниров иногда используются уточняющие термины: режущий (рис. 1.22, а) и примыкающий (см. рис. 122, б, в).
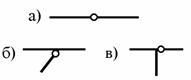
Рис.1.22
Рассмотренные выше связи плоских систем могут встречаться и в пространственных сооружениях, но их кинематические (и соответственно статические) характеристики будут иными. Например, цилиндрический шарнир в пространственной системе, оставляя свободным взаимный поворот соединяемых дисков в плоскости, перпендикулярной оси шарнира, устраняет возможность всех остальных (двух угловых и трех линейных) взаимных перемещений в месте соединения и, следовательно, накладывает пять ограничений на перемещения. Вообще в пространственной системе число возможных комбинаций ограничений угловых и линейных перемещений в точках соединения дисков значительно больше, чем в плоской, поэтому создание типологии сложных связей (с более чем одним ограничением на перемещения соединяемых дисков) для пространственных систем не имеет практической ценности. Различные случаи соединения пространственных дисков непосредственно рассматриваются как некоторые комбинации простых (линейных и угловых) связей. При этом линейная связь первого типа имеет по концам уже не цилиндрические, как в плоских системах, а шаровые шарниры, допускающие пространственные вращения.
Завершим изложение сведений о связях обсуждением особенностей учёта их свойств по последнему – 4-му признаку классификации.
Если в заданной расчётной схеме сооружения имеются податливые (деформируемые) связи, то в кинематическом анализе (до определённого момента – об этом ниже) после применения гипотезы их отвердения они могут заменяться типовыми жёсткими. На рис. 1.23, а представлена расчётная схема системы с податливыми внешними и внутренними линейными и угловыми связями, а на рис. 1.23, б – условная схема, применяемая в ходе выполнения кинематического анализа, в которой податливые связи заменены на соответствующие жёсткие, устраняющие те же самые перемещения, на которые исходные деформируемые связи накладывают ограничения (не устраняя их полностью).
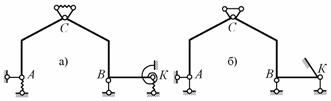
Рис.1.23
Анализ ограничений взаимных перемещений дисков (включая диск «земля») в узлах после введения жёстких связей приводит к заключению: в узле С соединение дисков – жёсткое, эквивалентное припайке (внутренняя связь 3-го типа), в узле К – опорный горизонтальный поступательный шарнир (внешняя связь 2-го типа), в узле А – неподвижная шарнирная опора (внешняя связь 2-го типа), в узле В – подвижная шарнирная опора (внешняя линейная связь 1-го типа). Использовав более лаконичный вариант изображения связей (см. табл. 1) в узлах А и К, получаем схему по рис. 1.24.
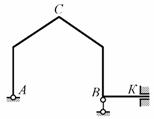
Рис.1.24
Некоторые «отверждённые» диски системы также могут рассматриваться как связи: кривой или ломаный стержень с шарнирами А и В по концам – как линейная связь АВ (рис. 1.25, а, б); стержень, жёстко прикрепленный концами к другим дискам, – как связь 3-го типа (припайка, соединяющая узлы А и В) – рис. 1.25, в.
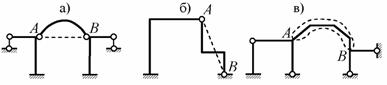
Рис. 1.25
Очевидно, что для обеспечения геометрической неизменяемости системы её диски должны быть соединены друг с другом и с диском «земля» некоторым минимумом связей. Число и тип связей зависят от того, сколько и каких по типу (линейных и угловых) перемещений в сумме имели бы диски, полностью свободные от связей (в дальнейшем такие диски будем называть несвязанными). Для оценки возможных перемещений дисков используется понятие степеней свободы.
|
|
|
|
Дата добавления: 2014-01-11; Просмотров: 1531; Нарушение авторских прав?; Мы поможем в написании вашей работы!