КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Якорное управление
|
|
|
|
Напряжение Uу подается на обмотку якоря, обмотка полюсов присоединена к сети постоянного тока с UВ=const. На рисунке 4.2.1.1 изображена схема включения исполнительного двигателя с якорным управлением.
 - коэффициент сигнала.
- коэффициент сигнала.
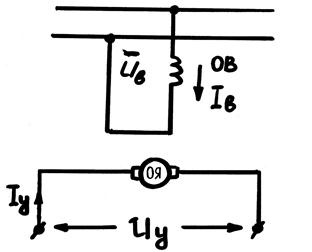
Рисунок 4.2.1.1
Так как реакция якоря мала, следовательно можно записать:
 (1)
(1)
Или  (2)
(2)
Вращающий момент, создаваемый в электродвигателе определяется выражением:
 (3)
(3)
Ток якоря:
 (4)
(4)
где rу – сопротивление обмотки якоря и щеточного контакта.
ЭДС, наводимая в обмотке якоря
 (5)
(5)
Подставляя (5) в (4), получаем:
 (6)
(6)
Подставив (6) в (3):
 (7)
(7)
За единицу момента (базовый момент) следует принять момент, развиваемый электродвигателем при n=0, a=1 (неподвижный якорь).
Подставив его в (7), не трудно заметить, что второе слагаемое равно нулю, тогда:
 (8)
(8)
Относительное значение момента:
Если якорь полностью разгружен m=0, a=1, т.е. режим идеального холостого хода – такой режим, когда ra=0, M=0, EЯ=UC, т.е. UY=UB.
 - скорость холостого хода.
- скорость холостого хода.
Относительная частота вращения:

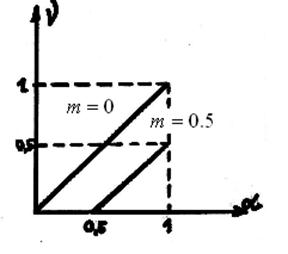
Таким образом, уравнение механической характеристики в относительных единицах примет вид:
|

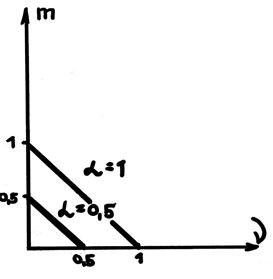
Это уравнение показывает, что вращающий момент исполнительного двигателя является линейной функцией скорости вращения и коэффициента сиг-нала, т.е. механические характеристики могут быть построены по двум точкам и при различных a. Механические характеристики представлены на рисунке 4.2.1.2. Из характеристик видно, что максимальный момент имеет место при пуске ( ).
).
Рисунок 4.2.1.2
Величина пускового момента в относительных единицах равна коэффициенту сигнала (при ,  ).
).
Это значит, что пусковой момент прямо пропорционален напряжению управления.
|
 механические характеристики смещаются параллельно в сторону меньших скоростей. Их наклон (жесткость) при этом не меняется. Регулировочные характеристики представленные на рисунке 4.2.1.3 описываются уравнением:
механические характеристики смещаются параллельно в сторону меньших скоростей. Их наклон (жесткость) при этом не меняется. Регулировочные характеристики представленные на рисунке 4.2.1.3 описываются уравнением:
Рисунок 4.2.1.3
Из характеристик видно, что при любом моменте сопротивления на валу частота вращения пропорциональна напряжению управления. Максимальная скорость имеет место при a=1. Наибольшую скорость двигатель развивает при холостом ходе, когда m=0

Мощность управления:
 строится в относительных единицах.
строится в относительных единицах.
За базовую мощность принимается мощность управления при коротком замыкании, т.е. при n=0, a=1:

|
Семейство характеристик представлено на рисунке 4.2.1.4
Полезная мощность:  (механическая мощность на валу двигателя) - является нелинейной функцией скорости.
(механическая мощность на валу двигателя) - является нелинейной функцией скорости.
На рисунке 4.2.1.5 изображено семейство кривых зависимости механической мощности от скорости вращения при различных a.
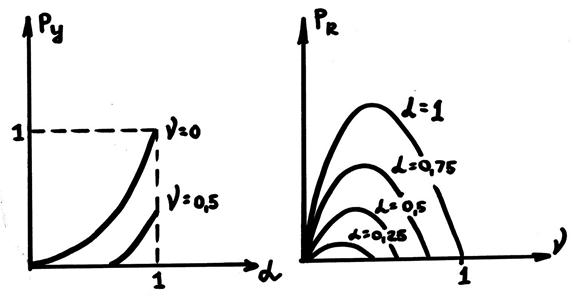
Рисунок 4.2.1.5 Рисунок 4.2.1.4
Уменьшение a, т.е. уменьшение UY резко уменьшает полезную мощность исполнительного двигателя.
Максимум механической мощности:
При пуске ( ) и при холостом ходе (m=0) полезная мощность равна нулю и достигает максимума при скорости равной половине скорости холостого хода (
) и при холостом ходе (m=0) полезная мощность равна нулю и достигает максимума при скорости равной половине скорости холостого хода ( ).
).
 (частота при РR.max)
(частота при РR.max)
|
|
|
|
|
Дата добавления: 2014-01-13; Просмотров: 652; Нарушение авторских прав?; Мы поможем в написании вашей работы!