КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Полюсное управление
|
|
|
|
Обмоткой управления является обмотка полюсов, а обмоткой возбуждения - обмотка якоря (рисунок 4.2.2.1).
Исходя из тех же предположений, что и при якорном управлении, значения магнитного потока из-за отсутствия насыщения пропорциональному току и напряжению управления:

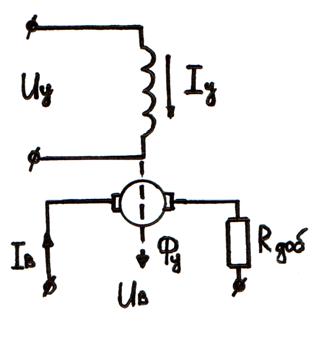
Рисунок 4.2.2.1
Вращающий момент пропорционален току якоря и потоку полюсов
 где
где  - сопротивление обмотка якоря щёточных контактов.
- сопротивление обмотка якоря щёточных контактов.
Rдоб. - добавочное сопротивление для снижения тока якоря.
В обмотке якоря наводится ЭДС  :
:


При движении якоря n=0 и  =1
=1
- пусковой момент при неподвижном якоре.
В относительный единицах:
Скорость идеального XX при m=0,=1
|
В относительных единицах:
 Уравнения механической характеристики:
Уравнения механической характеристики:
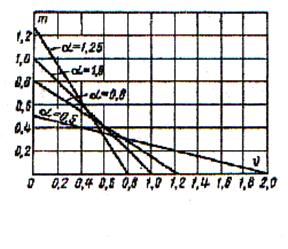
В отличие от исполнительных двигателей с якорным управлением жесткость механических характеристик при разных не остаётся постоянной, (Характеристики представлены на рисунке 4.2.2.2).
Рисунок 4.2.2.2
Чем меньше , тем меньше жесткость, тем меньше быстродействие.
|

 Уравнение регулировочной характеристики в относительных единицах:
Уравнение регулировочной характеристики в относительных единицах:
Регулировочные характеристики представлены на рисунке 4.2.2.3.
Регулировочные характеристики нелинейных скорость вращения  не изменяется
не изменяется  .
.
Теоретически при  .На практике этого нет. Нелинейность регулировочных характеристик является большим недостатком исполнительных двигателей с полюсным управлением.
.На практике этого нет. Нелинейность регулировочных характеристик является большим недостатком исполнительных двигателей с полюсным управлением.
однако ещё большим недостатком является неоднозначность регулировочных характеристик при
рисунок 4.2.2.3 малых моментах сопротивления (от 0 до 0,5  )
)
т.е одна и та же частота может быть получена при двух различных по величине 
Исполнительный двигатель с полюсным управлением применяется в таких схемах, когда момент сопротивления на валу не спускается ниже  .Это исключает неоднозначность регулировочных характеристик и возможности разноса двигателя при отсутствии
.Это исключает неоднозначность регулировочных характеристик и возможности разноса двигателя при отсутствии .
.
Максимальная мощность  не зависит от коэфицента сигнала. Это ценное качество, позволяющее даже при незначительном
не зависит от коэфицента сигнала. Это ценное качество, позволяющее даже при незначительном  получают больше механической мощности на валу.
получают больше механической мощности на валу.

 ;
;
|
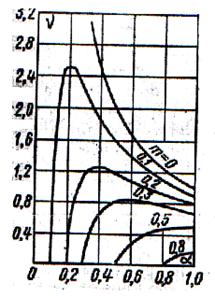
Из характеристик (рисунок 4.2.2.4) видно, что максимум механической мощности имеет место при скоро
рисунок 4.2.2.4 сти, равной половине скорости хо-
лостого хода.
Напряжение трогания у исполнительных двигателей c полюсным управлением пропорционально моменту сопротивления на валу.
Сравнения исполнительных двигателей с якорным и полюсным управлением.
Преимущества якорного управления:
-Линейность механической и регулировочной характеристики.
-Однозначность регулировочной характеристике при всех значения момента.
-Большая крутизна механической характеристики.
-Параллельность механической характеристике, т.е одинаковое быстродействие.
-Экономичность, ток через коллектор управления т.к  на порядок.
на порядок.
|
|
|
|
|
Дата добавления: 2014-01-13; Просмотров: 901; Нарушение авторских прав?; Мы поможем в написании вашей работы!