КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Конечные автоматы. Автомат - это математическая абстракция, которая предназначена для описания и анализа поведения разнообразных устройств дискретного действия или протекания
|
|
|
|
Автомат - это математическая абстракция, которая предназначена для описания и анализа поведения разнообразных устройств дискретного действия или протекания процессов дискретной обработки информации, для моделирования и построения устройств и процессов. Такая модель успешно используется как в технике (проектирование вычислительных машин, систем управления и связи), так и в других областях деятельности человека - теории и практике административного управления, лингвистике (анализ синтаксиса формального языка, расшифровка древних рукописей) и т. д. Универсальность теории автоматов позволяет рассматривать с единой точки зрения различные объекты, учитывать связи и аналогии между ними, переносить результаты из одной области в другую.
Автомат описывается шестёркой элементов А=(Q, X, Y, d, l, q1),
где Q = { q1, q2,..., qr } - множество состояний (алфавит состояний);
X = { x1, x2,..., xn } - множество входных символов (входной алфавит);
Y = { y1, y2,..., ym } - множество выходных символов (выходной алфавит);
d - функция переходов, реализующая отображение множества Dd,
DdÍQ´X, на множество Q (qp = d (qj, xj), qp ÎQ);
l - функция выходов, реализующая отображение множества Dl, DlÍQ´X, на множество Y (yd = l (qj, xi), yd Î Y);
q1 - начальное состояние автомата.
В общем случае автомат может иметь некоторое количество входов и выходов, и тогда каждому входу и каждому выходу может соответствовать свой алфавит. Рассмотрим более простой случай автомата с одним входом и одним выходом.
Автомат называется конечным, если конечны множества Q, X и Y. Автомат называется полностью определённым, если Dd=Dl=Q´X; у частичного автомата функции d и l определены не для всех пар (qj, xi)ÎQ´Y.
Символами xi и yk обозначают события в процессе или сигналы в устройствах. Иногда используют вместо понятия “символ” понятие “ буква ”; а последовательность букв называют словом.
В отличие от привычного рассмотрения времени (время непрерывно и задается на континууме), при изучении и проектировании автоматов удобно рассматривать воображаемое дискретное время (автоматное время, заданное на счётном множестве). Разобьём непрерывную числовую полуось на бесконечное число конечных интервалов, не обязательно равных между собой, и обозначим точки, разделяющие интервалы, неотрицательными целыми числами, начиная с 0 (рис. 2.1,а).
Будем называть дискретным временем t время, которое принимает лишь эти целочисленные значения. Моменты времени, обозначенные числами 0,1,2,..., будем называть тактами.
Отметим, что в реальных условиях сигналы представляются непрерывными функциями времени, поэтому для надежного различения сигналов требуется, чтобы новые значения на входах появлялись после окончания переходных процессов, связанных с предыдущими значениями. При рассмотрении логической структуры автоматов обычно отвлекаются от существа этих процессов и считают, что переменные изменяются мгновенно в тактовые моменты.
Кроме входных и выходных переменных, можно выделить некоторую совокупность промежуточных переменных, которые связаны с внутренней структурой автомата; именно они характеризуют состояние конечного автомата (КА).
При рассмотрении КА значения символов состояний и входов существенны лишь в моменты тактов и несущественны - в промежутках между ними. Поэтому эту модель можно использовать и для описания непрерывных устройств (процессов), если фиксировать значения символов состояний и входов в моменты тактов; при этом важно, чтобы в рассматриваемые дискретные моменты множество возможных состояний было конечным и чтобы удовлетворялось требование однозначной связи между состояниями в соседних тактах.
Понятие “ состояние автомата ” определяет некоторую предысторию его поведения как реакции на символы, которые поступали ранее на его входы, т. е. состояние соответствует некоторой памяти о прошлом.
Строгое определение понятия состояния связывается с той ролью, которую оно играет при определении конечных автоматов. Во-первых, значение выходной переменной на p -м такте (p -present-настоящее) y (p) однозначно определяется состоянием q (p) и значением входной переменной x (p) на том же такте, т. е. y (p)= l (q (p), x (p)). Во-вторых, состояние q (p +1) в следующем, (p +1)-м такте, однозначно определяется состоянием q (p) и входной переменной x (p) в рассматриваемом такте - q (p +1)= d (q (p), x (p)).
Таким образом, состояние КА в любой тактовый момент характеризуется значением такой переменной, которая вместе с заданным значением входной переменной позволяет определить выходную переменную в данный тактовый момент и состояние в следующий тактовый момент.
Ясно, что автоматы должны обладать способностью сохранять предыдущее состояние до следующего такта, в связи с чем их называют автоматами с памятью (последовательностными машинами). В качестве памяти могут использоваться элементы задержки, на выходах которых повторяются входные воздействия со сдвигом во времени на интервал между тактами Dt.
Термин “состояние” позволяет устранить время как явную переменную и выразить выходные символы как функцию состояний автомата и входов в данный момент (такт). В каждый момент t =0,1,2,... дискретного времени КА находится в определённом состоянии q (t) из множества Q состояний автомата, причём в начальный момент t =0 он всегда находится в начальном состоянии q (0)= q1. В момент p (рис. 2.1,б), находясь в состоянии q (p), КА способен воспринять на входе символ x (p)ÎX и выдать на выходе сигнал y (p)= l (q (p), x (p)), переходя в состояние q (p +1)= d (q (p), x (p),); q (p)ÎQ, y (p)ÎY.
Таким образом, КА реализует некоторое отображение j множества слов входного алфавита X во множество слов выходного алфавита Y: если на вход автомата, установленного в начальное состояние q1, подавать некоторую последовательность букв входного алфавита x (0), x (1), x (2),..., т. е. входное слово, то на выходе КА будут последовательно появляться буквы выходного алфавита y (0), y (1), y (2),..., т. е. выходное слово. Относя к каждому входному слову соответствующее ему выходное слово, получим отображение j, индуцированное конечным автоматом.
Автомат без памяти называется тривиальным автоматом, или комбинационной схемой. В таких автоматах значения выходных переменных определяются только комбинацией входных переменных в данный момент; для комбинационных схем функция переходов не имеет смысла, а функция выходов вырождается к виду y (p)= l (x (p)).
На практике наибольшее распространение получили автоматы Мили и Мура, приведенные на рис. 2.1, в и г; здесь: F1 и F2 - комбинационные схемы; D - задержка на один такт (память), q’ - новое (следующее) состояние в момент t = p.
Закон функционирования автомата Мили задается уравнениями:
q (t +1) = d(q (t), x (t)); y (t) = l (q (t), x (t)), t = 0, 1, 2,..., (2.11)
а автомата Мура -
q (t +1) = d (q (t), x (t)); y (t) = l (q (t)), t = 0, 1, 2,..., (2.12)
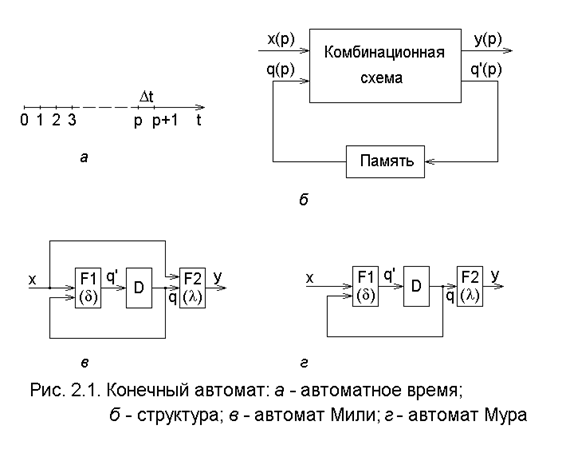
Отметим особенности функционирования автоматов Мили и Мура:
· оба автомата одинаково формируют новое состояние (q, x)® q’, которое затем задерживается на один такт, q (p +1) = q’ (p);
· выходной символ в автомате Мили определяется непосредственно входным символом и состоянием в текущий момент t = p ((q, x)® y), а в автомате Мура - только состоянием в текущий момент (q ® y) и опосредованно - состоянием и входным символом в предыдущий момент t = p -1 (y(p)=l(q (p)), где q (p)= d (q (p -1), x (p -1)));
· поскольку в автомате Мура выходной символ однозначно определяется его состоянием, то это позволяет идентифицировать состояние автомата по символам на его выходе, т. е. проверять правильность функцио-нирования синтезированного автомата;
· автомат Мили обычно проще (в смысле меньшего числа состояний) эквивалентного ему автомата Мура.
При анализе и синтезе КА используются в основном две стандартные формы представления автомата: табличная и графическая. Рассмотрим эти формы.
Автомат может быть представлен двумя таблицами для каждой из функций d и l либо совмещённой таблицей, несколько отличающейся для автоматов Мили и Мура.
При табличном представлении строки именуются символами состояний, а столбцы - символами входа; в клетках таблиц проставляются символы состояний, причём состояния записываются рядом через разделитель “/” с соответствующими выходными символами: для автомата Мили - в клетках, а для автомата Мура - в именующем столбце.
Для примера табл. 2.1 описывает поведение автомата Мили, а табл. 2.2 - автомата Мура.
Таблица 2.1 Таблица 2.2
| A1 | x1 | x2 | A2 | x1 | x2 | |
| q1 | q2/y1 | q3/y2 | q1/ y1 | q2 | q4 | |
| q2 | q3/y3 | --- | q2/y1 | q5 | q2 | |
| q3 | q4/y3 | q2/y1 | q3/y3 | q5 | q2 | |
| q4 | --- | q2/y2 | q4/y2 | q3 | q1 | |
| q5/y3 | q3 | q1 |
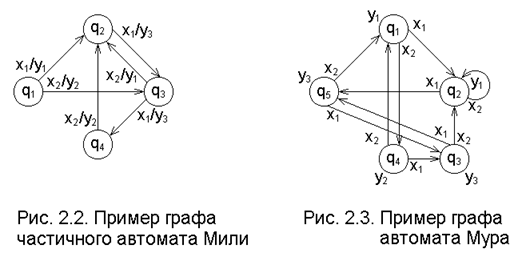
Граф автомата - ориентированный связный граф, вершины которого соответствуют состояниям, а дуги - переходам между ними. Две вершины графа автомата qi и qj (исходное состояние и состояние перехода) соединяются дугой, направленной от qi к qj, если в автомате есть переход qi ® qj, т. е. если qj = d (qi, xk) при некотором xk ÎX. В случае автомата Мили дуге графа приписываются входной символ xk и выходной символ yg = l (qi, xk), Если некоторые состояния автомата не определены, то в соответствующих клетках таблицы ставится прочерк; в этом случае автомат является частичным. Если переход qi ® qj происходит под действием нескольких входных символов, то дуге (qi, qj) приписываются все эти входные и соответствующие выходные символы. При описании автомата Мура в виде графа выходной символ yg = l (qj) записывается рядом с вершиной qj (или внутри неё).
На рис. 2.2 и 2.3 приведены заданные ранее табл. 2.1 и 2.2 графы автоматов А1 (частичный автомат Мили) и А2 (автомат Мура; здесь переход q2 ® q2 является петлёй).
 |
|
|
|
|
Дата добавления: 2014-01-14; Просмотров: 858; Нарушение авторских прав?; Мы поможем в написании вашей работы!