КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Датчик сигнализатора давления масла ДСДМ 7 страница
|
|
|
|
Датчики автоматики автомобиля
Экономайзер принудительного холостого хода
Принудительный холостой ход - 25% от времени работы двигателя коленчатый вал вращается от колес. Передача и зажигание включены, заслонка карбюратора закрыта (педаль газа отпущена, идет засасывание излишков топлива из-за повышенного значения частоты вращения коленчатого вала больше частоты холостого хода).Экономайзер содержит электромагнитный клапан в канале подачи топлива (при закрытии клапана - 5% экономия топлива). Имеется контактный датчик положения дроссельной заслонки. При закрытой заслонке контакты S разомктуты и закрыт клапан в контуре питания. При открытии дроссельной заслонки контакты замкнуты и клапан открывает канал подачи топлива.При снижении частоты вращения коленчатого вала до n=1140 об/мин сигнал датчика частоты вращения усиливается и открывает дополнительно управляющий транзистор, который включен параллельно контактам S и происходит открытие клапана в цепи топлива при закрытой дроссельной заслонке, поддерживается режим холостого хода на пониженной частоте вращения коленчатого вала двигателя:n=1500 об/мин - закрытие клапана;n=1140 об/мин - открытие клапана.
Эконометр- датчик разряжения под дроссельной заслонкой.
Темпомат- поддерживает скорость более 40 км/час при снятии ноги с педали газа.
Электромеханический регулятор дроссельной заслонки:1) система ограничения скорости - датчик скорости регулирует положение дроссельной заслонки.
2) препятствие саморазгону при спуске с горы + автоматическое управление тормозами.
Автомат рециркуляции отработавших газов- датчик разряжения на входе в двигатель,увеличивается разряжение, следовательно увеличивается подача отработавших газов.
Механическая коробка переключения передач без педали сцепления: датчик давления механических усилий, расположенный на рычаге переключения передач, сигнализирует насосу с гидровакуумным питанием цилиндра сцепления.
Автоматическая коробка переключения передач -работает на принципе гидротрансформатора (устройство преобразования частоты вращения: генератор давления + двигатель с гидравлическим управлением).Датчик частоты вращения входного вала гидротрансформатора; частоты вращения выходного вала Автоматическое поддержание постоянной частоты вращения на входном валу.
Система автоматики автомобиля BMW 745: ABS; автоматическая КПП; цифровая система управления ДВС (впрыск, опережение, электромагнитное управление газораспределением, приборный щиток с цифровой индикацией, единая оптоволоконная шина CAN-BUS. Антиблокировочная система тормозов (ABS) препятствует появлению скольжения колес по поверхности дороги. Датчик частоты вращения (прецизионный) и устройство измерения его производной.
Системы автоматики безопасности движения Датчики воздушных мешков безопасности: датчик ускорения до 50 g (основным является центральный - в центре автомобиля). Его сигнал поступает на МК + сигнал с контактного датчика удара (элементы "И").Емкостной датчик ускорения - два фиксированных и один подвижный элемент. Синхронный демодулятор 400-1000 Гц - полоса прохождения частот, используется искусственное механическое воздействие (вибратор).
Датчик положения рук на руле
Датчик малых ускорений ±5g.
Управляемая система подвески: регулирование плавности хода при наезде на бугор за счет поглощения энергии газовым демпфером; регулирование чувствительности системы к ударам; регулирование и подавление вибраций; регулирование чувствительности к скорости; регулирование и выравнивание наклона; регулирование продольного положения автомобиля; регулирование и стабилизация минимального значения клиренса; регулирование усилия торможения; снижение расхода топлива при движении по пересеченной местности. Датчики: скорости вращения колес; высоты на задних и передних колесах; угловое положение рулевого колеса (оптический); давления в гидравлической систем; температуры. Индикаторы и управляющие переключатели: ключ выбора высоты подвески; выключатель регулирования высоты подвески; переключение степени демпфирования колебаний ("комфорт", "спорт"); световой индикатор отсутствия контроля высоты подвески; индикатор контроля высоты подвески. Исполнительные органы: электромеханические или пневматические устройства.
Лекция29
ОРГАНИЗАЦИЯ МУЛЬТИПЛЕКСНОЙ СИСТЕМЫ АВТОМОБИЛЯ:
Мультиплексная система автомобиля предназначена для скоростного обмена информационными потоками между управляющими электронными устройствами по каналу, называемому шиной. В современных системах по шине обычно циркулируют цифровые сообщения, содержащие информацию, команду или запрос. В идентификаторе сообщения может содержаться адрес реального получателя либо адрес условного (виртуального) получателя. Анализируя последний, микроконтроллеры соответствующих управляющих блоков принимают решение о чтении данного сообщения в случае необходимости получения содержащейся в нем информации, то есть сообщение с подобным идентификатором не имеет конкретного адресата.
Тенденции развитиямультиплексных систем европейских автомобилей на примере модели Citroen CS французского автомобильного концерна PSA: Citroen С5 содержит на своем борту четыре мультиплексные сети, обменивающиеся информацией через интеллектуальный сервисный модуль BSI (Built-in Systems Interface). В роли внутрисистемной выступает высокоскоростная сеть CAN (Controller Area Network), хорошо зарекомендовавшая себя и широко распространившаяся. CAN отличается высокой скоростью передачи данных ввиду своих функциональных особенностей, отличной помехоустойчивостью и надежностью. В основной сети CAN Ситроена действуют шесть условных блоков: микропроцессорная система управления двигателем, блоки управления АКП, ABS, ESP, гидропневматической подвеской, блок контроля угла поворота руля. Скорость передачи информации в данном случае составляет 250 кбит/с.
Другие три сети являются локальными и работают на основе сети VAN (Vehicle Area Network), которая была разработана совместными усилиями французских автомобильных концернов. Сеть VAN приемлемо использовать только в электронных системах управления вспомогательных устройств и комфорта автомобиля.
На шине VAN CAR 1 установлены: контроллеры подушек безопасности, датчиков дождя и освещения, системы подрулевых переключателей и фар. VAN CAR 1 обеспечивает функционирование ряда вспомогательных устройств, имеющих относительно высокий приоритет работы и, следовательно, нуждающихся в достаточно скоростной передачи данных.
VAN CAR 2 работает на невысокой скорости 62,5 кбит/с и обслуживает контрольные и управляющие блоки левой и правой передних дверей, системы топливных присадок (для автомобилей с дизельными двигателями), люка, охранной сигнализации. К четвертой сети, называемой VAN COMFORT, подключается множество контроллеров сферы комфорта, число которых зависит от уровня оснащения автомобиля. В соответствии с этим, объем потока сообщений высок и скорость их передачи составляет 125 кбит/с. К сфере комфорта относятся: центральный дисплей бортового компьютера, приборная панель, аудиосистема с подрулевым управлением, парковочная система, климат-контроль и кондиционер, блок навигации и т.д.
Отличительной особенностью мультиплексной системы автомобиля Citroen С5 является то, что все четыре сети автономны. Поэтому в случаях нарушения связи (отказа) со связующим блоком BSI или каким-либо контроллером, когда определенные устройства соответственно перестают получать необходимые данные, эти устройства и автономные сети продолжают свою работу в аварийном режиме.
Мультиплексная система обновленного в 2004 году Citroen С5 (С5ХЗ) претерпела ряд изменений. Теперь все сети нового автомобиля организованы на основе сетевого протокола CAN, что дает возможность расширить унификацию мультиплексных микроконтроллеров. Скорость и качество передачи информации значительно возросли, так как интеллектуальный сервисный модуль BSI оказался избавлен от задач перевода данных из среды CAN в VAN (и наоборот). Произошли некоторые структурные изменения: BSI приобрел ряд новых функций, перераспределены обязанности контуров сетей. На Citroen CSX3 устанавливаются дополнительные контроллеры следящих электронных систем поворота фар, пересечения сплошной линии дорожного полотна и др.
Мультиплексные системы европейских автомобилей становятся все совершеннее и достигают все более высоких уровней экономии за счет унификации бортовой мультиплексной электроники.В свете нарастающей потребности перехода к гибридным силовым установкам автомобилей и тенденций оснащения концептуальных (по сути, предсерийных) автомобилей электронными органами управления без механических связей следует ожидать расширения унификации и роста производительности мультиплексной системы автомобиля.
ТАХОГРАФ ДЛЯ ГРУЗОВЫХ АВТОМОБИЛЕЙ СЕМЕЙСТВА«КАМАЗ»
Микропроцессорный тахограф «Спутник-МПТ», разработанный кафедрой АТЭО Тольяттинского Государственного Университета по специальному заказу автопредприятия АО «АвтоВазТранс».Данная модель тахографа предназначена для установки на автомобили семейства КАМАЗ. В связи с тяжелыми условиями эксплуатации к тахографу как и прочим устройствам автомобильной электроники предъявлены особые требования в соответствии с ГОСТ 3940-84 и РТМ 37.003.031-81.
Весь комплект МПТсостоит из трех блоков: базовый модуль, картридж и интерфейсный.Базовый модуль является системой сбора информации с комплекса датчиков и передачи ее в картридж. Он расположен в кабине водителя под панелью, расположенной между щитком приборов и вещевым ящиком. Базовый модуль представляет из себя алюминиевый корпус, имеющий на лицевой поверхности углубление для установки туда картриджа. После установки картридж закрывается металлической дверцей, с помощью внутренних механизмов дверь защелкивается и не может быть открыта механически. Открытие производится внутренним электромагнитом при наборе правильного кода на клавиатуре, которая расположена на передней панели базового модуля. Клавиатура состоит из двух светодиодов. При неправильном вводе на картридж записывается информация, что была произведена неудачная попытка получить доступ к картриджу. Код базового модуля может быть изменен при техническом обслуживании. Доступ к картриджу может получить только специализированный обслуживающий персонал.
Картридж является запоминающим устройством МПТ. Он представляет из себя небольшую монолитную пластмассовую коробочку в форме параллелепипеда с отверстиями по краям. В отверстия вводятся направляющие штифты базового модуля для четкой фиксации картриджа во время движения автомобиля. Отличительной особенностью тахографа «Спутник МПТ» от зарубежных аналогов является отсутствие любых электрических контактов между картриджем и базовым модулем. Обмен данными между ними происходит через оптический канал связи, а питание электрических цепей картриджа осуществляется подачей на него электромагнитного излучения.
Таким образом, при данном виде связи отпадают проблемы связанные с коррозией или механическим износом электрических контактов, картридж является автономной системой, не имеющей непосредственной связи с внешним миром, что существенно повышает надежность информационного носителя картриджа.
Основным блоком картриджа МПТ является запоминающее устройство (ЗУ), которое должно иметь большой объем памяти и быть энергонезависимым. Бесспорным лидером энергонезависимых ЗУ в настоящее время является продукт фирмы Intel-FLASH память. Микросхема FLASH памяти 28F008SA выполнена на основе К-МОП технологии, имеет словарную организацию (длина слова-8 бит) и объем памяти 1 Мбайт и выше. Тахограф может непрерывно записывать в картридж параметры о состоянии автомобиля не менее чем 1,5 месяца, что позволяет использовать тахограф «Спутник-МПТ» на автопоездах сверхдальнего следования.
Экономистами было подсчитано, что внедрение тахографа позволило значительно увеличить экономическую эффективность автопоезда. Доходы только одного этого автопоезда возросли на 31%, чистая прибыль, которую получило предприятие увеличилась на 8,1% после того, как поставили тахограф. Таким образом, один тахограф окупится предприятию за полтора - два месяца. И теперь используя автомобиль более экономично, рационально, предприятие будет получать дополнительные доходы.
Лекция30 СИСТЕМА КРУИЗ-КОНТРОЛЬ ДЛЯ ОТЕЧЕСТВЕННОГО ЛЕГКОВОГО АВТОМОБИЛЯ НА ОСНОВЕ МИКРОКОНТРОЛЛЕРА PIC18F452
Система круиз-контроль для отечественного легкового автомобиля на основе микроконтроллера PIC18F452 фирмы Microchip. Особенностью системы является электронный привод педали газа с датчиком, выдающим информацию в цифровом коде - 6 бит, что соответствует фиксации педали газа в 64 позициях. Разработана программа для управления шаговым двигателем привода дроссельной заслонки. Flash-память программ микроконтроллера PIC18F452 фирмы Microchip - 32 килобайта, оперативная память - 1536 байт. Для построения простейшей системы круиз-контроль эти параметры являются избыточными, однако этот вариант выбран по причине возможного усовершенствования конструкции в дальнейшем. Например, возможно использование свободных ресурсов для оперативного тестирования таких систем, как управление впрыском и зажиганием. Возможности этого микроконтроллера позволяют выдавать на жидкокристаллический экран бегущей строкой информацию о сбоях в работе различных систем автомобиля.
Предлагаемая система круиз-контроль может работать в двух режимах: управляемое водителем движение с переменной скоростью и движение с постоянной заданной скоростью, которую поддерживает микроконтроллер и автоматический привод дроссельной заслонки. В первом случае используется электронный привод от педали газа к дроссельной заслонке. Во втором движению автомобилю система автоматически изменяет положение дроссельной заслонки для поддержания скорости на заданном уровне. Предусмотрена возможность звуковой индикации предупреждения водителя о необходимости переключения передачи в механической коробке передач.
ИЗМЕРИТЕЛЬ РАСХОДА ТОПЛИВА
Для обеспечения необходимой устойчивости систем управления автомобилями необходимо внедрение точных методов контроля топлива. Интенсивные исследовательские и конструкторские разработки последних лет за рубежом привели к созданию ряда приборов для измерений расхода топлива транспортных средств. В настоящее время в этих приборах используются три основных типа датчиков: турбинный, термоанемометрический, шарикоцир-куляционный.
Рабочие характеристики турбинных датчиков в сильной степени зависят от качества изготовления, состояния и качества градуировки. Можно обеспечить точность около 1-2%. Однако сигнал искажается из-за большой турбулентности и значительных градиентов скорости потока. Нижний предел измерения определяется порогом страгивания крыльчатки, который меняется по мере износа опор. Существенное достоинство этих датчиков - быстродействие (время запаздывания несколько миллисекунд), высокая точность, нечувствительность к изменению пространственной ориентации. Основной недостаток - изменение температуры и давления окружающей среды сопровождается изменением плотности и вязкости топливных паров. Изменение плотности вызывает изменение движущего момента и сказывается на показаниях прибора. С уменьшением плотности уменьшается частота вращения турбинки и возрастает порог чувствительности.
К достоинствам термоанемометрического датчика относятся: низкое сопротивление, быстродействие, высокая чувствительность и стабильность небольшие габариты, относительная простота конструкции, обеспечивающая высокую надежность. Недостатки - зависимость показаний от температуры и плотности топливной смеси, быстрое старение чувствительного элемента.
Достоинства шарикоциркуляционных датчиков - простота конструкции, отсутствие изнашиваемых подшипников. Но их показания очень сильно зависят от вязкости среды, очень большая нелинейность, износ шариков и дорожек.
Разработана конструкция прибора для измерения расхода топлива транспортных средств с поворотной лопастью.
На участке магистрали размещается миниатюрный датчик с поворотной лопастью, на которую воздействует гидродинамическое давление топливных паров. Отверстия на лопасти устраняют возможные вибрации чувствительного элемента. Расход определяется по углу поворота лопасти. В данном датчике верхний конец лопасти жестко закреплен. Под действием динамического давления потока лопасть не поворачивается, а работает на изгиб, противодействующий момент образуется силами упругости лопасти.
Анализ показал, что наиболее перспективной конструкцией датчика для измерения расхода топлива является прибор с плоской пружиной. Эта пружина легко изготавливается, надежна в эксплуатации, обладает малыми габаритами. Достоинства: простота устройства и надежность в работе при высоких температурах и веществ с агрессивными свойствами, малая инерционность, отсутствие сухого трения, неподверженность к вибрации автомобиля. Датчик прост и компактен, приведенная погрешность не превышает ±1 %.
Для дальнейшей обработки сигнала непосредственно с деформируемого элемента на лопасти размешаются тензорезисторы. Корпуса тензорезисторов надежно изолированы.
На основе предлагаемой конструкции расходомера возможно изготовление сигнализатора, который в случае повреждения топливных магистралей выдает сигнал для перекрытия трубопровода клапаном.
СИСТЕМЫ УПРАВЛЕНИЯ КЛАССА PCNC И ИХ ПРОГРАММИРОВАНИЕ ПРИМЕНИТЕЛЬНО К ЗАДАЧАМ АВТОМАТИЗИРОВАННОГО КОНТРОЛЯ
В настоящее время активно развиваются системы многофункциональные модульные системы управления на базе мощных ЭВМ, которые относятся к классу PCNC-систем. Эти системы обладают мощными вычислительными ресурсами и аппаратными возможностями, а также обеспечиваются специализированными средами разработки. Эти системы являются самыми подходящими для построения на их базе средств активного и пассивного контроля и измерений, которые легко встраиваются в технологические процессы. Крайне важно то, что эти системы позволяют не только получать информацию с измерительных датчиков, но и хранить и обрабатывать ее.
В качестве языка программирования стандартом де-факто стал язык G (Джей), который обеспечен средами разработки от ведущих мировых производителей, а также является самым подходящим языком для инженерного программирования автоматизированных измерительных систем. На языке G система PCNC программируется как единое целое, т.е. имеются развитые средства параллелизма. При этом операционной системой может являться любая из поддерживаемых производителями аппаратной платформы и про-граммного комплекса среды разработки, в том числе и ОС семейства Windows, Linux и Mac OS.
В среде программирования G имеются обширные библиотеки функций для ввода/вывода, обработки, анализа и визуализации сигналов, контроля и управления технологическими объектами, статистического анализа и комплексных вычислений.
В качестве аппаратных устройств сопряжения ЭВМ с источниками сигналов (аналоговыми измерительными датчиками) используются специализированные модули, большинство из которых построены на базе цифровых сигнальных процессоров (ЦСП, DSP - Digital Signal Processor). Мировым лидером в области разработки и производства DSP является компания Analog Device Inc. Модули на основе DSP позволяют перенести часть обработки сигнала на борт модуля, что очень удобно при решении задач с обратной связью (DSP управляет работой модуля и пересылкой данных на ЭВМ).
Была применена PCNC-система для автоматизации лазерной измерительной системы, в которой в качестве модуля сопряжения был применен универсальный высокоточный модуль на базе ЦСП ADSP-2185M. Написанная на G программа представляет собой измерительную систему и предназначена для считывания сигналов с лазерного позиционно-чувствительного датчика через АЦП-канал модуля.
Структурная схема G-программы для одного измерительного канала показана на рисунке 119. С помощью подчиненного виртуального инструмента DEV_REG_UNl_ALLOC выделяем память для структуры DEV_REG_UNI, дескриптора модуля, в котором будет содержаться служебная информация после вызова функции OpenLDeviceO, которая и заполняет дескриптор такими параметрами, как номер прерывания, тип ЦСП, базовый диапазон ввода вывода и т.п. SLOT_PARAM_ALLOC выделяет память для структуры, в которой содержится информация о драйвере модуля. С помощью подинструментов DEV_REG_UNI_PARAM_access и SLOT_PARAM_access выводим часть полученной информации на главный виртуальный инструмент. Функцией LoadBiosl450 загружается БИОС в DSP модуля. Функция PlataTest_1450 тестирует модуль на работоспособность. Подинструмент PI.ATA_DESCR_1450_ALLOC выделяет память для структуры PLATA_DESCR_1450. В структуру PLATA_DESCR_1450 загружаем калибровочные коэффициенты, которые записываются во флэш-память на заводе-производителе с помощью функции readPlataDescr_l4500- Функцией FillADCParameters_1450 инициализируем АЦП и заполняем структуру adcPar необходимыми параметрами для сбора данных, такими, как параметры синхронизации, кол-во и номера каналов, по которым будут собираться данные и размер буфера модуля. В функции RequestBufFer выделяем под буфер обмена 100000 байт. Вызов этой функции настраивает модуль на заданные параметры ввода данных, устанавливает размера буфера, задает интервал генерации прерываний,передает приложению адреса буфера в оперативной памяти и переменной синхронизации.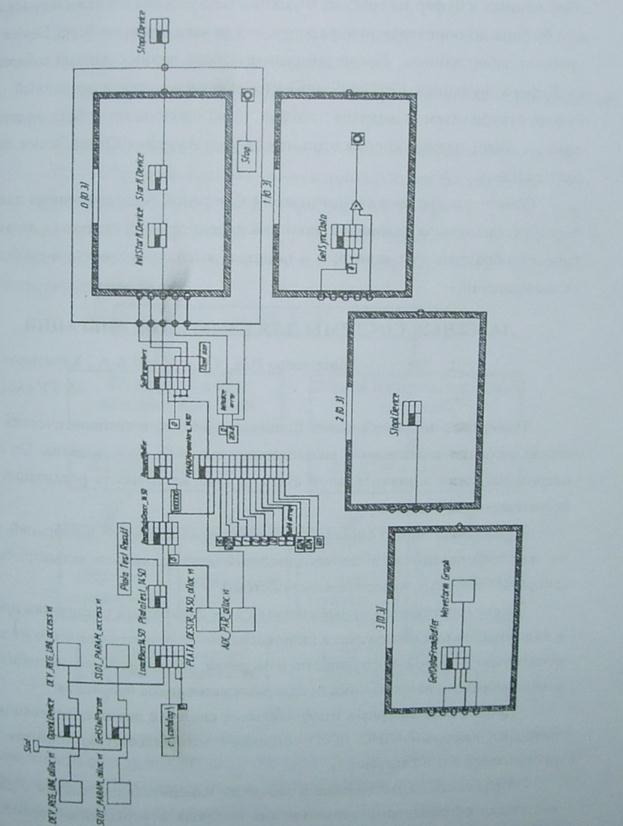
Рис.119 Структурная схема G-программы для одного измерительного канала
Далее главный цикл программы. Функция InitStartOevice инициализирует переменные перед началом сбора, а функция StarU.Device запускает сбор данных в буфер на модуле. Функция GetSyncData отслеживает заполнение буфера ло определенного размера, после чего функция StopLDevice прекращает забор данных. После завершения сбора данных данные забираются из буфера функцией GctDauFromBuiTer помещаются в созданный (наш) буфер, откуда затем выводятся на экран. Цикл продолжает работу до тех пор, пока не будет нажата кнопка стоп, после чего функция Close!.Device закрывает драйвер.
Описанная система автоматизации измерений была применена для экспериментального исследования лазерной измерительной системы с двумя оптически обращенными каналами и показала высокую точность и удобство использования.
ЛАЗЕРНЫЕ СИСТЕМЫ ДЛЯ ИЗМЕРЕНИЯ ВИБРАЦИИ
От параметров вибраций в значительной степени зависит точность реализации технологических процессов. Существует много способов для измерения параметров вибраций. Среди них перспективными являются с (опорные) лазерные измерительные системы.Осесимметричные лазерные системы в их аппаратной реализации просты и надежны, но они не получили широкого применения прежде всего из-за относительно низкой стабильности измерения, обусловленной нестабильностью диаграммы направленности лазерных источников излучения. Применение лазерных измерительных систем с двумя оптически обращенными каналами (ЛИС ДОК) устраняют этот недостаток, повышая точность измерения в десятки раз.Классификация лазерных измерительных систем с двумя оптически обращенными каналами для контроля и управления параметров вибраций (лазерные виброметры с двумя оптически обращенными каналами –ЛВ ДОК), приведена на рис. 120.В соответствии с классификацией, ЛВ ДОК делятся на две большиегруппы:- ЛВ ДОК для измерения линейных вибраций,- ЛВ ДОК для измерения угловых вибраций. В свою очередь каждая из этих больших групп делится на две большие подгруппы:- ЛВ ДОК с одним позиционно-чувствительным фотоприемником,- ЛВ ДОК с двумя позиционно-чувствительными фотоприемниками. Далее каждая из этих подгрупп разделяется на три подгруппы, одна из которых строится с отражателем, другая - без отражателя, а в третьей используется отражение лазерного излучения непосредственно от поверхности контролируемого объекта.
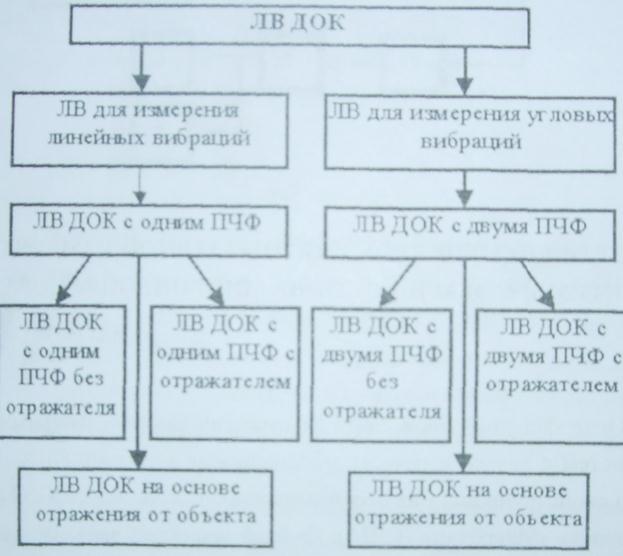
Рис.120 Классификация лазерных измерительных систем
Таким образом в квалификационной таблице можно выделить следующие четыре подгруппы ЛВ ДОК: ЛВ ДОК с одним ПЧФ без отражателя, ЛВ ДОК с одним ПЧФ с отражателем, ЛВ ДОК с двумя ПЧФ без отражателя, ЛВ ДОК с двумя ПЧФ с отражателем.Разработана лазерная измерительная система, которая обеспечивает повышение точности измерения амплитуды, частоты, фазы и формы колебания деталей и технологических конструкций автоматизированного производства за счет стабилизации диаграммы направленности лазера.
Структурная схема изображена на рисунке121, где:1 - лазерный источник излучения (газовый или полупроводниковый), 2 - оптический отражатель, 3 - позиционно-чувствительный фотоприемник, 4 - усилитель мощности электрического сигнала, 5 - шинный усилитель, 6 - ЭВМ, 7 - осциллограф (самописец), 8 - объект измерения.
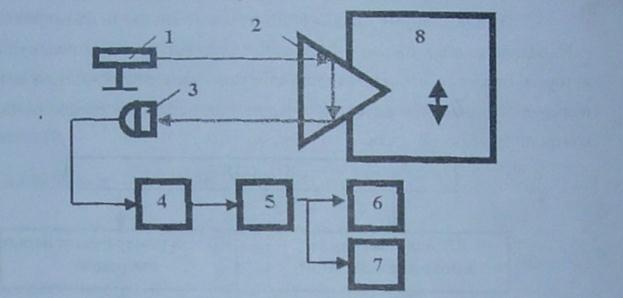
Рис.121 лазерная измерительная система
ИНТЕРФЕЙСНЫЙ БЛОК СВЯЗИ ЛАЗЕРНОЙ ИЗМЕРИТЕЛЬНОЙ СИСТЕМЫ С ЭВМ НА ОСНОВЕ МИКРОПРОЦЕССОРА PIC16F87
Интерфейсный блок связи автоматизированных лазерных измерительных систем с двумя оптически обращенными каналами (ЛИС ДОК) с ЭВМ можно сконструировать на основе микропроцессора типа PIC16F876 производства фирмы «Микрочип» (США). Данный процессор является автономной системой, состоящей из блоков ОЗУ, ЭСПЗУ, аналого-цифрового преобразователя, асинхронно-последовательного приемопередатчика, синхронно-последовательного приемопередатчика, узла компараторного преобразования, 20-ти портов ввода-вывода. Процессоры семейства PIC нашли широкое применение в преобразовательных устройствах, блоках и модулях сопряжения, автономных микроконтроллерных системах, а также для управления интерфейсами приема-передачи информации. По сравнению с другими аналогичными процессорами, например, процессорами фирмы «АопеЬ», процессоры Р/С имеют меньшую цену, более просты в программировании, обеспечены широким набором средств отладки и русскоязычной документацией. Функциональность процессоров PIC вполне достаточна для решения поставленной задачи.
Система состоит из ТТЛ-преобразователя для сопряжения блока с ПЭВМ, процессора PICI6P87 (сердцем процессора является 16-ти разрядная «RISC»-система), тактового генератора, стабилизированного кварцевым резонатором с частотой 10МГц. После подачи напряжения питания происходит принудительный сброс ЦПУ и запуск программы, находящейся в ЭСПЗУ (флеш) с «нулевого адреса». Система соединяется с ПЭВМ и обрабатывает данные посредством асинхронного протокола RS-232, работающего со скоростью 19200 бот/сек, данные из процессора попадают в ТТЛ преобразователь, оттуда в командный порт ПЭВМ (COM PORT).Программа выполняет следующую последовательность операций:1. Настройка скорости АСПП и настройка АЦП.2. Получение 10-ти бит данных с блока АЦП.3. Передача старших двух бит.4. Передача младших восьми бит.5. Переход к пункту 2.
Система применяется для преобразования аналогового, многоуровневого сигнала автоматизированных ЛИС ДОК в цифровой вид и последующую передачу полученных данных на ПЭВМ и систему УЧПУ. Данные с ПЭВМ специализированными программными средствами можно преобразовывать в графический вид (графики осциллограмм), обрабатывать на математическом процессоре, например с помощью программы MathCAD.Структурная схема устройства приведена на рис. I19.Разработана программа на языке Ассемблера микропроцессоров семейства PIC, осуществляющая выше указанные функции.
ОБЗОР СИСТЕМ УПРАВЛЕНИЯ ПОДВЕСКОЙ АВТОМОБИЛЯ
Огромную роль на комфортабельность, управляемость и безопасность оказывает подвеска автомобиля. Подвеска это совокупность устройств, которая обеспечивает упругую связь кузова с колесами. Она служит для снижения динамических усилий передаваемых на кузов (гашения энергии ударов), оптимального затухания колебаний вызываемых этими нагрузками и для регулирования положения кузова во время движения. Можно сформулировать основные требования предъявляемые к подвеске автомобиля:- упругая характеристика подвески должна обеспечивать высокую плавность хода и отсутствие ударов в ограничители хода, противодействовать кренам при повороте, «клевкам» при торможении и разгоне автомобиля;- кинематическая схема должна создать условия для возможного малого изменения колеи и углов установки колес, соответствие кинематики колес кинематике рулевого привода, исключающее колебания управляемых колес, вокруг оси поворота;- оптимальная величина затухания колебаний кузова и колес;- надежная передача от колес кузову или раме продольных и поперечных усилий и моментов;- малая масса элементов подвески и особенно неподрессоренных частей;- достаточная прочность и долговечность деталей подвески и особенно упругих элементов, относящихся к числу наиболее нагруженных частей подвески.
Не управляемая подвеска в среднем удовлетворяет этим требования. Но с ростом требований к комфортабельности и управляемости особенно при высоких скоростях, производители автомобилей начали внедрять управяемые подвески. Условно можно разделить их на три основных типа. К первому относятся подвески с принудительным управлением жесткостью и клиренсом, назовем их регулируемыми. Ко второму типу относятся подвески, управление параметрами которых осуществляется с помощью микропроцессора в зависимости от дорожных условий, назовем их адаптивными. Адаптивная подвеска практически полностью исключает «клевки» при торможении и разгоне, устраняет крены при поворотах. Наконец третий тип самый прогрессивный и дорогостоящий- в нем управляющая информация поступает с датчиков на каждом колесе и обрабатывается контроллером, который изменяет параметры упругих элементов с очень малой задержкой (миллисекунды). Этот тип назовем активной подвеской. В активной подвеске может применяться также системы упреждения, заранее сканирующие профиль дороги, она позволяет повысить комфортабельность автомобиля в среднем на 20%.
В качестве управляемых упругих элементов применяют пневморессоры (телескопические - «Citroen» или с резинокордными оболочками - у «остальных» производителей») совместно с амортизаторами, которые также управляются контроллером. Давление в рессорах поддерживается специальным компрессором и лежит обычно в пределах от 1.5 до 9 бар в зависимости «от обстановки» (для легковых автомобилей). Жесткость регулируется за счет изменения объема поглощающего агента (воздух, азот). Существует зависимость жесткости пневморессоры от частоты колебаний. С ростом скорости подвеска становится жестче. Чтобы изменять скорость затухания колебания перепускные отверстия в амортизаторах делают с переменным сечением, величина которого задается контроллером. О положении кузова и характере его изменения позволяет судить система датчиков. Сигналы поступают от датчика вертикального и продольного ускорений, высоты, угла и скорости поворота руля, оборотов двигателя и степени открытия дроссельной заслонки, датчиков скорости автомобиля, усилия нажатия на педаль тормоза, выбора водителем положения кузова. Система поддерживает кузов автомобиля в неизменном состоянии независимо от статической нагрузки и возникающих во время движения динамических нагрузок, уменьшает дорожный просвет на высоких скоростях, улучшая аэродинамику и снижая тем самым расход топлива, меняет частоту колебаний, улучшая плавность хода, устойчивость и управляемость автомобиля.
|
|
|
|
Дата добавления: 2014-01-14; Просмотров: 502; Нарушение авторских прав?; Мы поможем в написании вашей работы!