КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Настройка точного регулятора
|
|
|
|
Теперь необходимо синтезировать точный закон управления. Для этого воспользуемся теми же методами и средой Matlab. Структуру точного регулятора попробуем немного изменить. Исключим из неё релейный элемент и добавим коэффициент усиления по контуру.
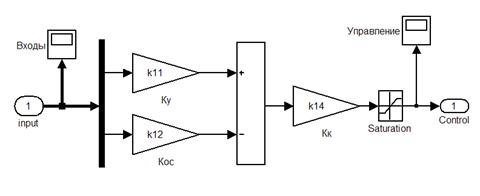
Рис.38. Структурная схема точного регулятора.
Оптимизацию будем проводить, используя не выходную координату с вала двигателя, а величину ошибки по положению, т.к. в данном случае нас интересует исключительно точность. Оптимизировать будем три параметра: коэффициент усиления всей системы  , коэффициент обратной связи по скорости
, коэффициент обратной связи по скорости  и коэффицент усиления по контуру
и коэффицент усиления по контуру  .
.
Подадим на вход NCD Outport оптимизируемую величину (величина ошибки по положению).
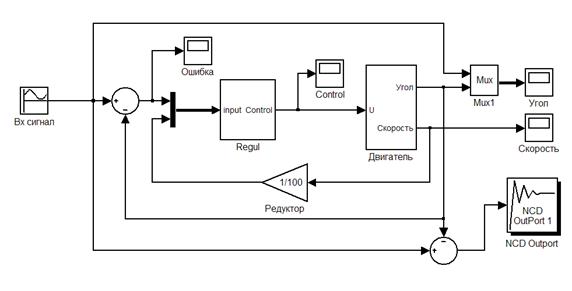
Рис.39. Схема модели для оптимизации точного закона управления.
Исходя из предъявляемых к системе требований, ограничим область, в которой может располагаться график зависимости регулируемой величины от времени. Оптимизацию будем производить при гармоническом входном сигнале, т.к. он наиболее трудно поддается точному слежению. Верхнюю и нижнюю границы области переходных процессов считаем обусловленной максимальным значением входного сигнала плюс 40% запаса с каждой стороны, крайняя правая – задана временем регулирования, которое не должно превышать шести секунд. Т. е. в течение шести секунд в системе допускаются переходные процессы, т.к. быстродействие данного регулятора не является основной характеристикой. И движение считается установившимся при попадании величины ошибки в заданный коридор -  .
.
Рис.40. Задание требований к системе(точный закон регулирования)
В результате поиска было получены следующие коэффиценты: коэффициент усиления Ку= 34.15, коэффициент обратной связи по скорости Кос= 20.97 и коэффициент по контуру Кк = 98.24. Но величина амплитуды ошибки все равно превышает границы коридора, а также наблюдается слишком большая колебательность установившегося процесса. Поэтому необходимо использовать дополнительные способы повышения точности.
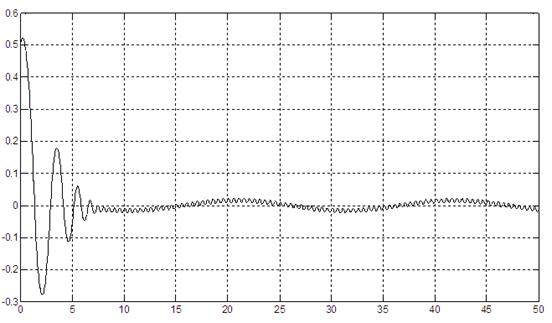
Рис.41. Ошибка слежения после оптимизации в NCD Blockset (точный закон управления).
|
|
|
|
|
Дата добавления: 2014-01-14; Просмотров: 411; Нарушение авторских прав?; Мы поможем в написании вашей работы!