КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Регулювання руху машини за допомогою маховика
|
|
|
|
План
Або
Або
План
Або
Або
План
1. Типи незрівноваженості відцентрових сил інерції та її наслідки.
2. Статичне зрівноваження однієї маси.
3. Статичне зрівноваження декількох мас.
4. Динамічне зрівноваження мас, що обертаються навколо осі.
1. Типи незрівноваженості відцентрових сил інерції та її наслідки
З метою збільшення продуктивності машини збільшують швидкості руху її ланок. Це веде до зростання прискорень, а отже, і відцентрових сил інерції ланок, що обертаються навколо осі. Причому діють вони не в одному якомусь напрямку, а обертаються разом з ланкою. Незрівноважені сили інерції викликають вібрацію машини, додаткові напруження майже в усіх її ланках, передчасне їх спрацювання, а часом (при резонансі) аварії та поломки. Тому сили інерції необхідно ретельно зрівноважувати.
Особливої актуальності набула ця проблема в наш час, коли створюються машини, ланки яких мають значні маси і обертаються з великими кутовими швидкостями. Сюди треба віднести вали швидкохідних двигунів, барабани центрифуг, турбіни, ротори гіроскопів тощо. Частота деяких із цих деталей досягає 20000 … 50000 об/хв і більше. При цих умовах роботи надзвичайно важливим є питання про правильне розподілення мас цих деталей відносно їх осі обертання.
Маси, що обертаються навколо осі, можуть створювати незрівноваженість двох типів: статичну та динамічну. Тому розрізняють статичне та динамічне зрівноваження мас.
Незрівноваженість відцентрових сил інерції, яка виникає від того, що центр мас не лежить на осі обертання, називається статичною.
Незрівноваженість відцентрових сил інерції, яка виникає від того, що маси розподілені нерівномірно вздовж осі обертання, називається динамічною.
2. Статичне зрівноваження однієї маси
Нехай маса m, розміщена на відстані r від осі, обертається з кутовою швидкістю ω навколо нерухомої осі АВ (рис.1). При цьому маса розвиває силу інерції, яка дорівнює:
 .
.
Щоб зрівноважити цю силу інерції, необхідно на осі АВ закріпити противагу, яка буде розвивати таку ж за величиною і протилежну за напрямком силу інерції, тобто:
 .
.
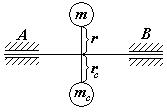
Рис.1
Оскільки:
 ,
,
то:
 .
.
Задаючись певною масою  , визначимо відстань
, визначимо відстань  , на якій слід розмістити противагу від осі обертання:
, на якій слід розмістити противагу від осі обертання:
 .
.
Оскільки маса і противага обертаються з однаковою кутовою швидкістю ω, то при визначенні rc вона не бере участі. Це означає, що зрівноваження можна здійснювати при будь-якій швидкості обертання.
А добуток mr є статичним моментом маси відносно осі обертання.
Покажемо масу противаги і радіус її віддалення rc від осі на рис.1.
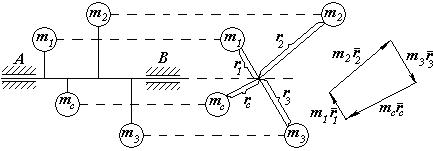
3. Статичне зрівноваження декількох мас
Розглянемо більш загальний випадок зрівноваження мас. Нехай на одному валу закріплено декілька мас m1, m2 та m3, які обертаються з кутовою швидкістю ω (рис.2, а).
а) б)
Рис.2
Сили інерції, які розвиваються цими масами дорівнюють:
 ,
, ,
,  .
.
Умовою статичного зрівноваження ланки є рівність нулю статичних моментів мас (дисбалансів), інакше, результуюча сила інерції мас, що обертаються, повинна дорівнювати нулю:

де  – кутова швидкість обертання ланки;
– кутова швидкість обертання ланки;  – елементарна маса;
– елементарна маса;  – відстань елементарної маси від осі обертання.
– відстань елементарної маси від осі обертання.
Оскільки  , то очевидно:
, то очевидно:

За цим рівнянням будуємо многокутник статичних моментів мас (рис.2,б) і як замикальний вектор визначаємо добуток  противаги. Задаючись однією з цих двох величин (наприклад, ) визначимо іншу :
противаги. Задаючись однією з цих двох величин (наприклад, ) визначимо іншу :
 .
.
Напрямок радіуса-вектора  визначимо із рисунка 2, б.
визначимо із рисунка 2, б.
Противага (зрівноважуюча маса) може бути виставлена в будь-якій точці по довжині вала (див. рис.2, а).
4. Динамічне зрівноваження мас, що обертаються навколо осі
Нехай на одному валу закріплено дві маси m1 та m2, які обертаються з кутовою швидкістю ω (l1, l2 – відстані від площини зведення) (рис.3,а).
Для зрівноваження динамічних навантажень від моментів сил інерції визначимо моменти  та
та  цих сил відносно точки А:
цих сил відносно точки А:
 ;
;  .
.
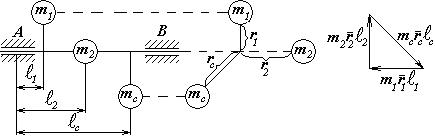
а) б)
Рис.3
Умовою динамічного зрівноваження ланки є рівність нулю відцентрових моментів мас, або результуючий момент від сил інерції мас, що обертаються, повинен дорівнювати нулю:
 ,
,
де  – відстань від елементарної маси до площини зведення.
– відстань від елементарної маси до площини зведення.
Якщо  , то маємо:
, то маємо:

За цим рівнянням будуємо многокутних відцентрових моментів мас (рис.3,б) і як замикальний вектор визначаємо добуток  противаги. Напрямок векторів обираємо так, щоб дивлячись вздовж вектора бачити обертання таким, що відбувається проти ходу годинникової стрілки.
противаги. Напрямок векторів обираємо так, щоб дивлячись вздовж вектора бачити обертання таким, що відбувається проти ходу годинникової стрілки.
Зрівноважуюча маса може бути встановлена в будь-якій точці вала (див. рис.3, а). Тоді при певній відстані  необхідно підібрати таке значення маси mc і відстані rc від осі, щоб задовольнялась рівність:
необхідно підібрати таке значення маси mc і відстані rc від осі, щоб задовольнялась рівність:

Знак моменту визначиться замикальним вектором многокутника моментів.
Тема: “Механічний коефіцієнт корисної дії (к.к.д.)”
1. К.к.д машини при послідовному з’єднанні механізмів.
2. К.к.д. машини при паралельному з’єднанні механізмів.
3. К.к.д. машини при змішаному з’єднанні механізмів.
1. К.к.д машини при послідовному з’єднанні механізмів
Механічним коефіцієнтом корисної дії називається відношення абсолютної величини роботи сил корисного опору до роботи всіх рушійних сил:
 .
.
Враховуючи, що  , маємо:
, маємо:
 .
.
Цю формулу можна записати у вигляді:
 .
.
Відношення роботи сил шкідливого опору Аш.о до роботи Аррушійних сил позначають ψ і називають механічним коефіцієнтом втрат:
 .
.
У відповідності з цим останню формулу можна подати так:
η=1– ψ.
 Нехай маємо n послідовно з’єднаних між собою механізмів (рис.1). Перший механізм приводиться в рух рушійними силами, що здійснюють роботу Ар. Оскільки корисна робота кожного попереднього механізму, що витрачається на корисний опір, є роботою рушійних сил для кожного наступного, то к.к.д. першого механізму дорівнює:
Нехай маємо n послідовно з’єднаних між собою механізмів (рис.1). Перший механізм приводиться в рух рушійними силами, що здійснюють роботу Ар. Оскільки корисна робота кожного попереднього механізму, що витрачається на корисний опір, є роботою рушійних сил для кожного наступного, то к.к.д. першого механізму дорівнює:
 ,
,
другого:
 ,
,
третього:
 ,
,
n -го:
 .
.
Значення загального коефіцієнту корисної дії машини може бути отримано, якщо перемножити всі окремі к.к.д. механізму η1, η2, …, ηn. Маємо:
 .
.
Таким чином, загальний механічний коефіцієнт корисної дії при послідовному з’єднанні механізмів дорівнює добутку к.к.д. окремих механізмів, що утворюють одну спільну систему.
Очевидно, при такому з’єднанні загальний к.к.д. буде меншим найменшого к.к.д. механізму.
2. К.к.д. машини при паралельному з’єднанні механізмів
При паралельному з’єднанні механізмів робота рушійної сили розгалуджується на всі паралелі (рис.2).
Визначимо к.к.д. кожного механізму. Для першого маємо:
 ,
,
другого:
 ,
,
п -го:
 .
.
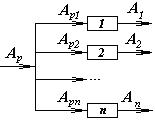
Рис.2
Загальний к.к.д. машини визначиться за формулою:

 .
.
Очевидно, при такому з’єднанні механізмів загальний к.к.д. буде більшим за найменший і меншим за найбільший к.к.д. механізму.
3. К.к.д. машини при змішаному з’єднанні механізмів
Нехай маємо змішане з’єднання механізмів, тобто таке, коли частина з них з’єднана послідовно, а частина паралельно (рис.3).
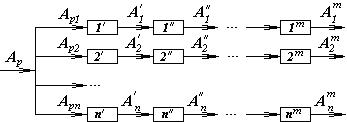
Рис.3
К.к.д. кожного розгалудження визначиться за формулами:
 ;
;
 ;
;
………………
 .
.
К.к.д. всього механізму визначимо так:

 .
.
Отже, із цієї формули виходить, що загальний к.к.д. машини залежить від схеми розподілення енергії, яка була взята за основу при проектуванні механізмів.
Питання для самоконтролю
1. До яких наслідків ведуть незрівноважені відцентрові сили інерції?
2. Типи незрівноваженості відцентрових сил інерції ланок, їх означення.
3. Як статично зрівноважити одну масу, що обертається навколо осі?
4. Яка умова статичної зрівноваженості мас? Пояснити побудову многокутника статичних моментів мас відносно осі обертання.
5. Яка умова динамічної зрівноваженості мас, що обертається навколо осі? Пояснити побудову многокутника відцентрових моментів мас.
6. Що називається механічним коефіцієнтом корисної дії (к.к.д.)?
7. Як визначається к.к.д. машини при послідовному з’єднанні механізмів?
8. Як визначається к.к.д. машини при паралельному з’єднанні механізмів?
9. Як визначається к.к.д. машини при змішаному з’єднанні механізмів?
Лекція “№39
Тема: “Вступ в теорію регулювання”
1. Рівняння руху машини.
2. Періоди руху машини. Періодичні й неперіодичні коливання кутової швидкості
3. Регулювання руху машини за допомогою маховика.
4. Поняття про регулятори швидкості.
1. Рівняння руху машини
Запишемо рівняння кінематичної енергії стосовно машини
 ,
,
де Ар – робота рушійних сил; Ао – робота всіх сил опору;  – кінетична енергія машини; v0 і v – швидкості на початку і в кінці переміщення.
– кінетична енергія машини; v0 і v – швидкості на початку і в кінці переміщення.
Запишемо це рівняння у вигляді:
 .
.
Величина в дужках є не що інше, як робота сил інерції Аін. Тоді рівняння буде мати вигляд:
Ар – Ао±Аін=0.
Подвійний знак у роботі сил інерції Аін стоїть тому, що кінетична енергія в залежності від значень v і v0 може бути додатною і від’ємною. Далі в рівнянні виділимо окремо роботу Ак.о .сили корисного опору, роботу Атр сил тертя і роботу Ав сил ваги. Тоді рівняння буде мати вигляд:
Ар – Ак.о. – Атр±Аін±Ав=0.
Робота сил ваги Ав має подвійний знак, оскільки при підніманні загального центра мас ланок машини робота від’ємна, а при опусканні – додатна.
Загальне рівняння руху машини справедливе для будь-якого періоду її роботи.
2. Періоди руху машини. Періодичні й неперіодичні коливання кутової швидкості
Рух машини можна розглядати таким, що складається із трьох періодів (рис.1):
1) розбігу;
2) усталеного руху;
3) вибігу.
Зобразимо тахограму машини – криву ω=ω(t) залежності кутової швидкості ω початкової ланки від часу t.
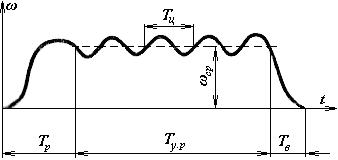
Рис.1
Найтривалішим за часом є період усталеного руху, протягом якого машина виконує певні технологічні операції, тобто здійснює корисну роботу.
Усталений рух, на відміну від інших періодів, характеризується сталою швидкістю руху ведучої ланки. Однак ідеальної стабільної швидкості досягти важко, оскільки багато причин, пов’язаних з конструкцією машини і режимом її роботи, викликають безперервні коливання швидкості. Тому миттьова кутова швидкість вала безперервно змінюється протягом кожного циклу руху, залишаючи сталим своє середнє значення ωср.
Коливання кутової швидкості викликають порушення режиму технологічного процесу, який виконує машина, а також веде до виникання сил інерції, які є причиною спрацювання ланок. Повністю позбутись коливань неможливо. Але можна встановити межі, в яких буде змінюватись кутова швидкість ведучих валів для періоду усталеного руху. Отже, одним із основних завдань регулювання є обмеження коливань швидкості руху в заданих межах.
Коливання кутової швидкості можуть бути:
а) періодичними;
б) неперіодичними.
Періодичними називаються такі коливання, коли кутова швидкість повторює свої значення через рівні проміжки часу, кратні частоті обертання ланки. Періодичні коливання швидкості спостерігаються в механізмах і машинах, в яких діючі на ланки сили змінюються в певній залежності від кута повороту ведучої ланки (двигуни внутрішнього згорання, поршневі насоси тощо).
Неперіодичні коливання викликаються раптовою зміною притоку енергії до двигуна або сил опору, які долає машина, і не мають певного циклу. Наприклад, такі коливання виникають у сільськогосподарських машинах із-за різної пухкості ґрунту, в металорізальних верстатах із-за нерівномірного розподілення припуску на обробку тощо.
Періодичні коливання регулюються за допомогою маховика, а неперіодичні – за допомогою регуляторів швидкостей.
Маховик – це колесо з важким ободом 1, яке розвиває значний момент інерції відносно осі обертання (2 – диск, 3 – маточина) (рис.2).
 Вплив маховика на зменшення коливань кутової швидкості руху ведучої ланки можна пояснити таким чином.
Вплив маховика на зменшення коливань кутової швидкості руху ведучої ланки можна пояснити таким чином.
Маховик, будучи насадженим на ведучий вал, обертається з кутовою швидкістю цього вала. Всяка зміна кутової швидкості викликає виникнення моменту сил інерції маховика, який перешкоджає цій зміні.
Чим більший момент інерції маховика, тим більший момент сил інерції, а отже, і опір зміні швидкості. Кінетична енергія маховика при збільшенні кутової швидкості зростає, це має місце у тому випадку, коли робота рушійних сил більша роботи сил опору ( Ар>Ао).
Якщо Ар<Ао, то кутова швидкість обертання вала стане зменшуватись. У цьому випадку накопичена раніше маховиком кінетична енергія буде виступати додатковим джерелом енергії, яке сприяє зменшенню амплітуди коливань кутової швидкості.
|
|
|
|
|
Дата добавления: 2014-10-23; Просмотров: 693; Нарушение авторских прав?; Мы поможем в написании вашей работы!